 SLAM for Duckiebots - Duckietown")



-

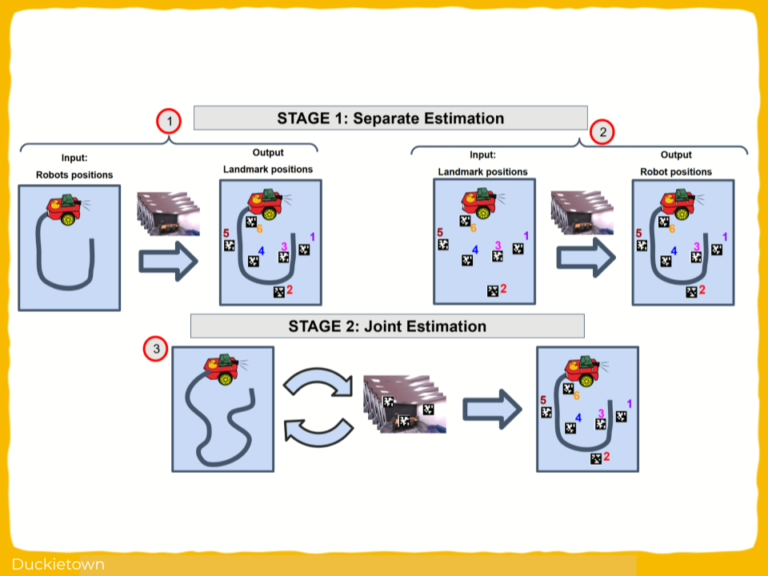
- Figure 1. EKF-SLAM Architecture Overview

-
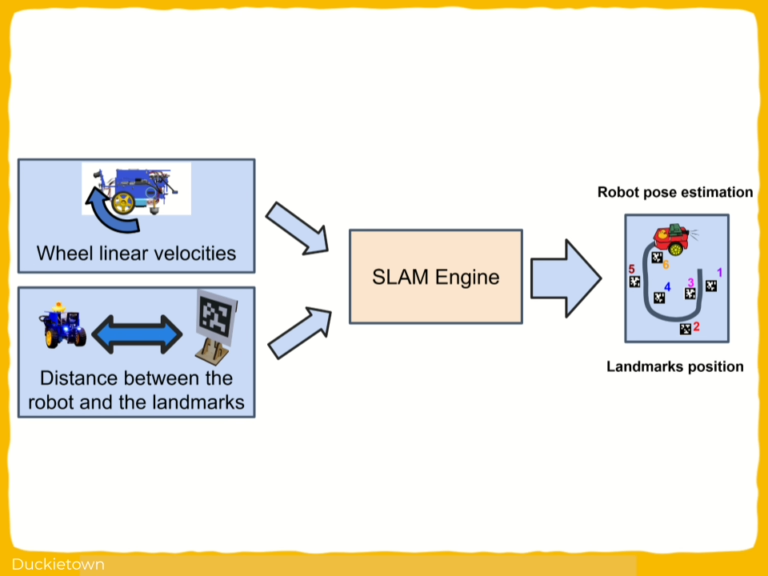
- Figure 2. Extended Kalman Filter (EKF) SLAM input and output flow diagram

-
- Figure 3. Incorporating landmarks into the odometry problem

-
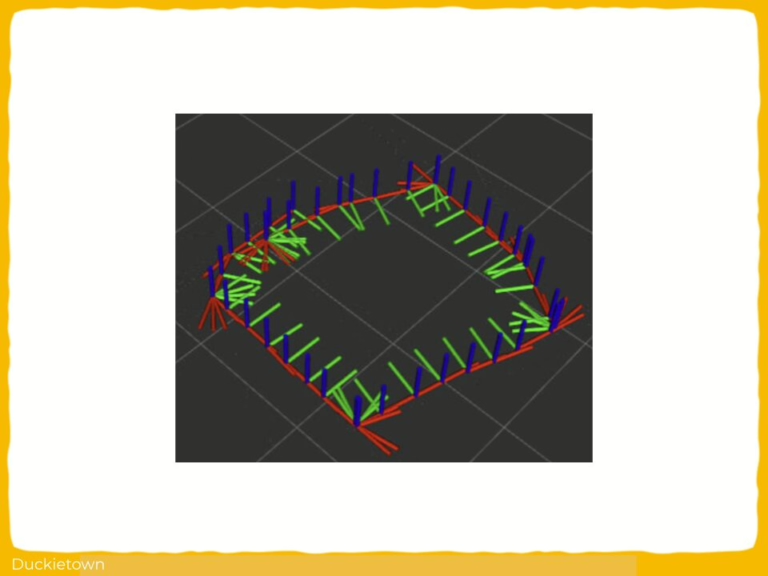
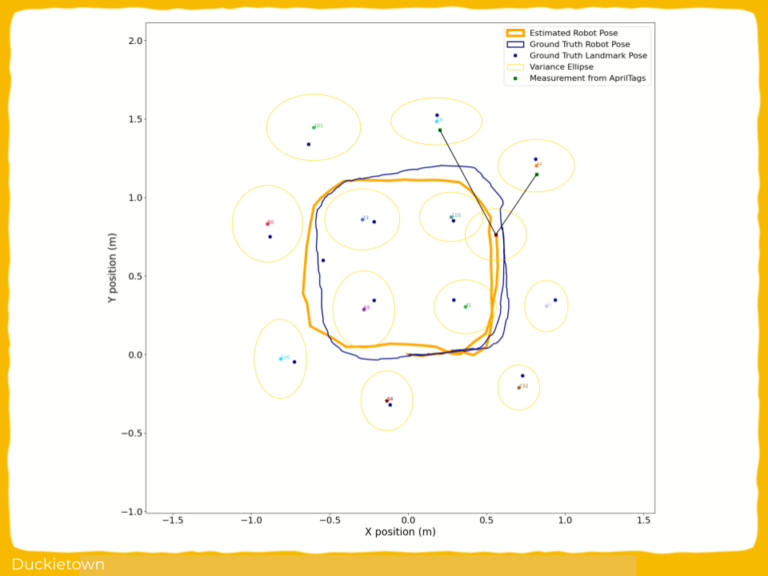
- Figure 4. Odometry after incorporating landmarks

-
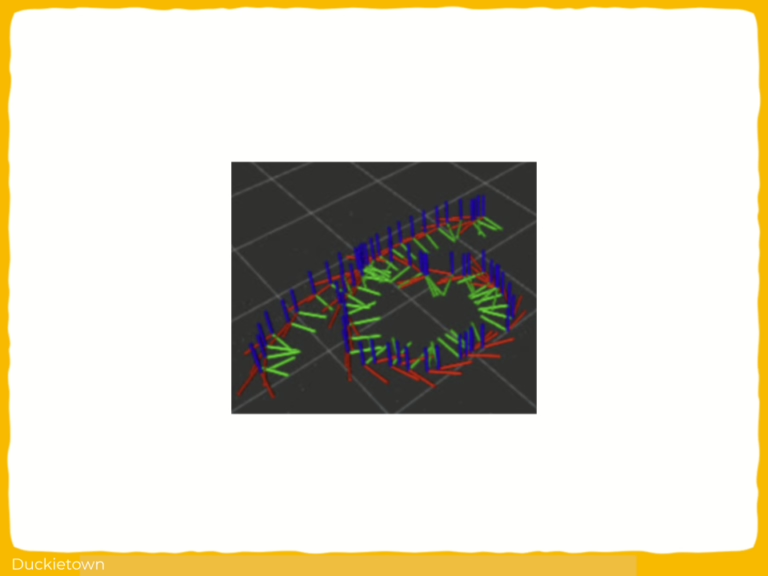
- Figure 5. Odometry before incorporating landmarks

-
- Figure 6. EKF-SLAM Trajectory Interpolation

-
- Figure 7. EKF’s prediction-correction workflow

-
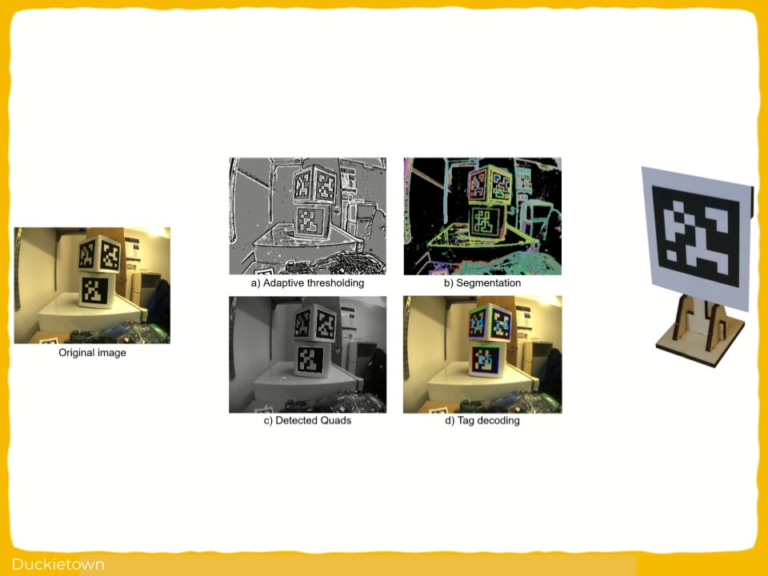
- Figure 8. EKF-SLAM AprilTags Detection

-
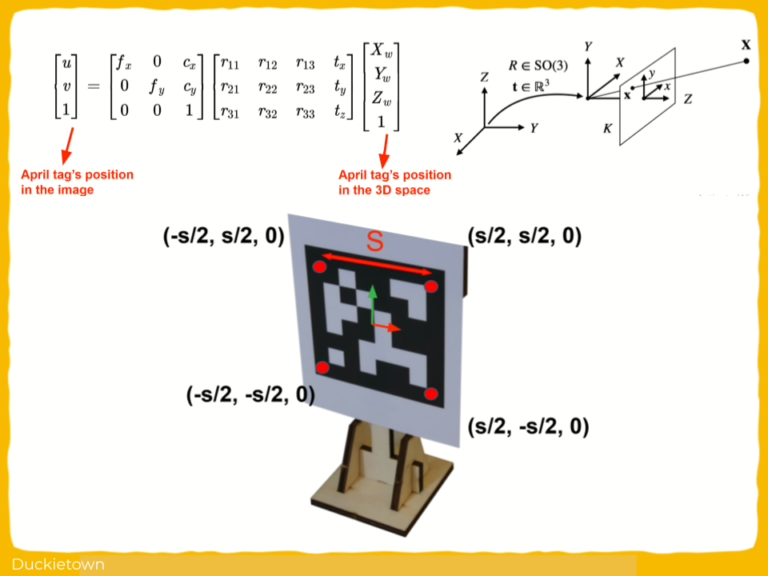
- Figure 9. EKF-SLAM AprilTags Pose Estimation

-
- Figure 10. EKF-SLAM Motion Model Equations

-
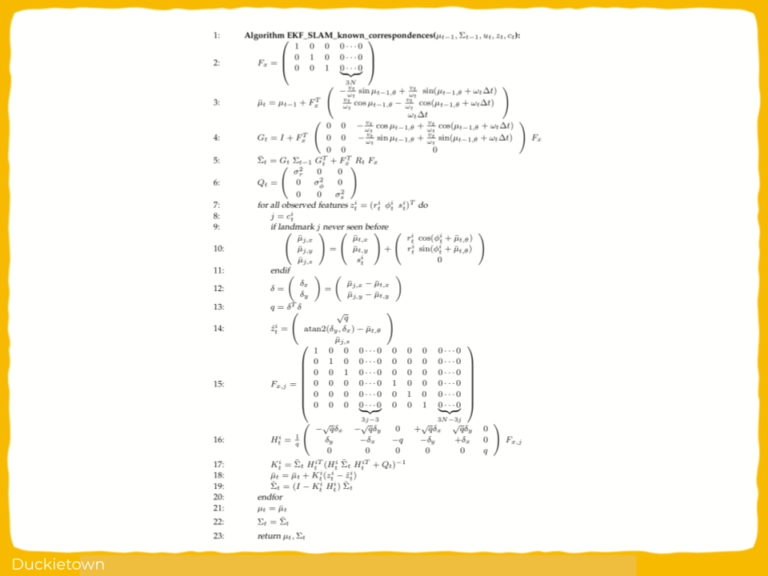
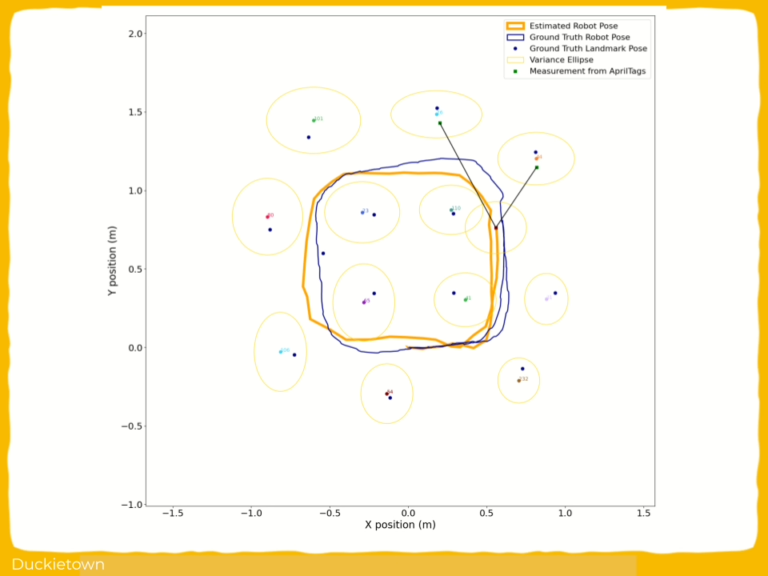
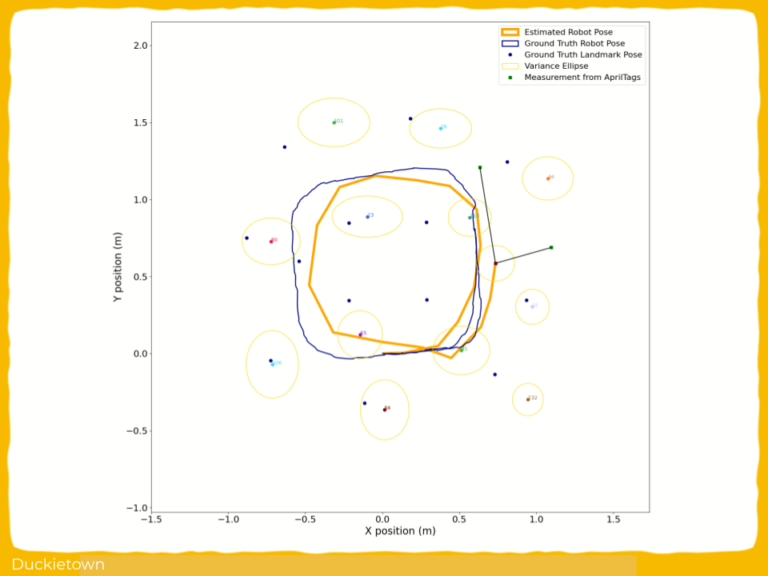
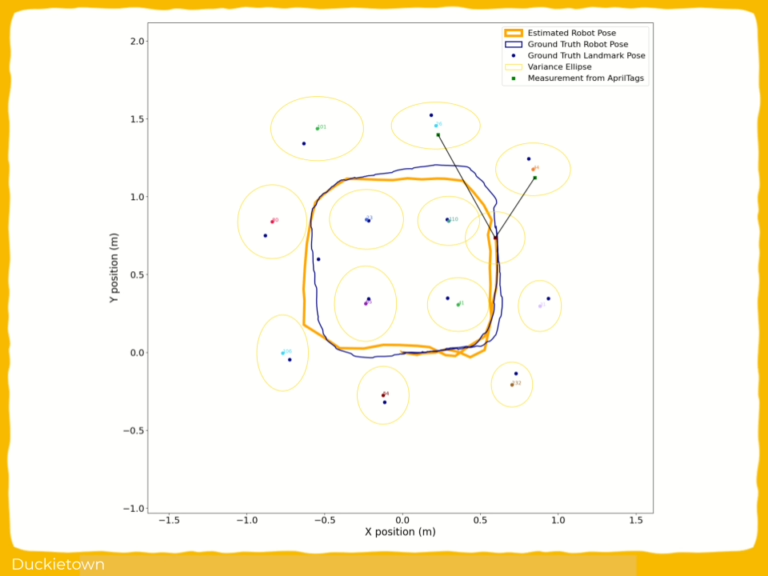
- Figure 11. EKF-SLAM full version (motion+measurement model)
 - Duckietown")
-
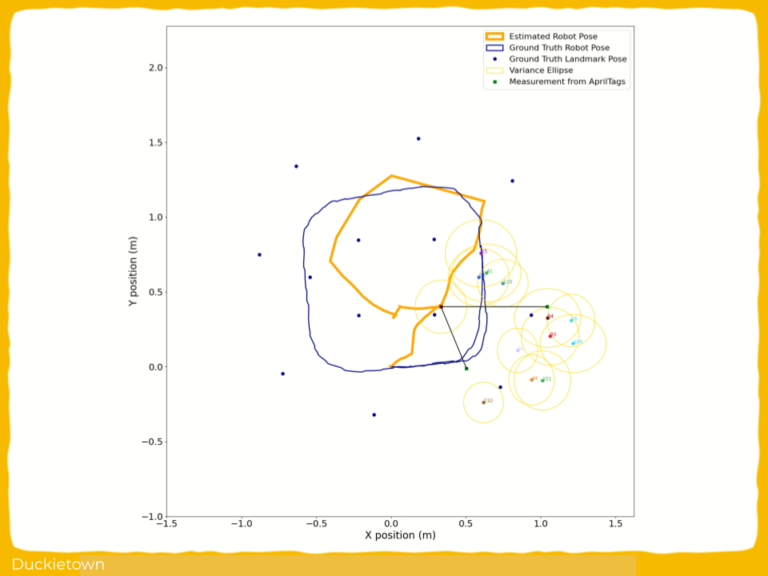
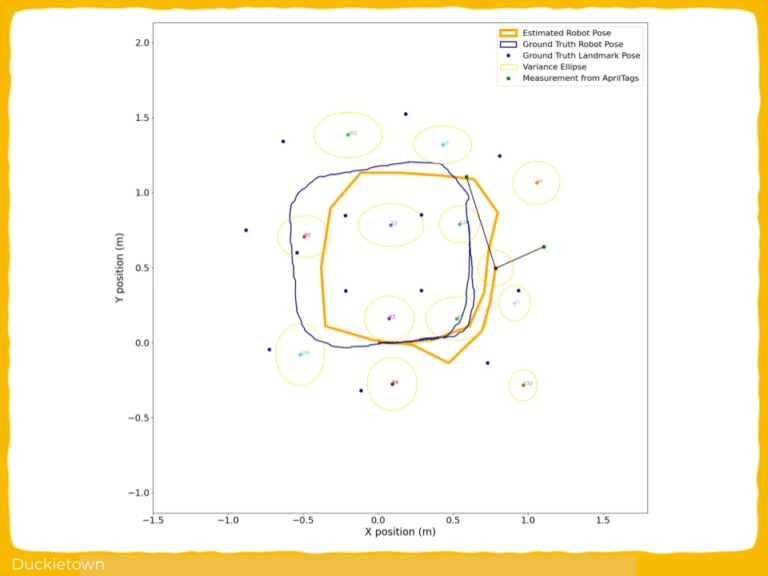
- Figure 12. EKF-SLAM measurement model (without motion model)
 - Duckietown")
-
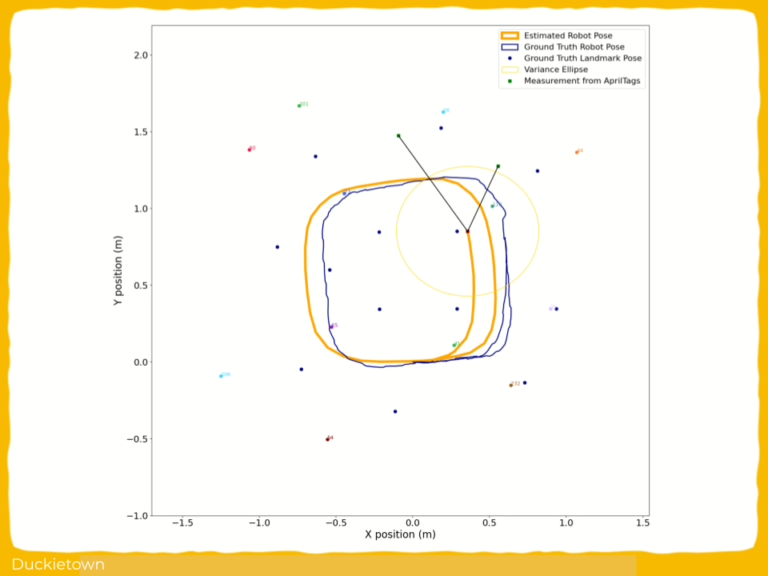
- Figure 13. EKF-SLAM motion model (without measurement model)
 - Duckietown")
-
- Figure 14. Pose estimation using a circular interpolation

-
- Figure 15. Pose estimation using a circular interpolation_DELTA_TIME=2

-
- Figure 16. Pose estimation using a linear interpolation

-
- Figure 17. Pose estimation using a linear interpolation_DELTA_TIME=2






