-

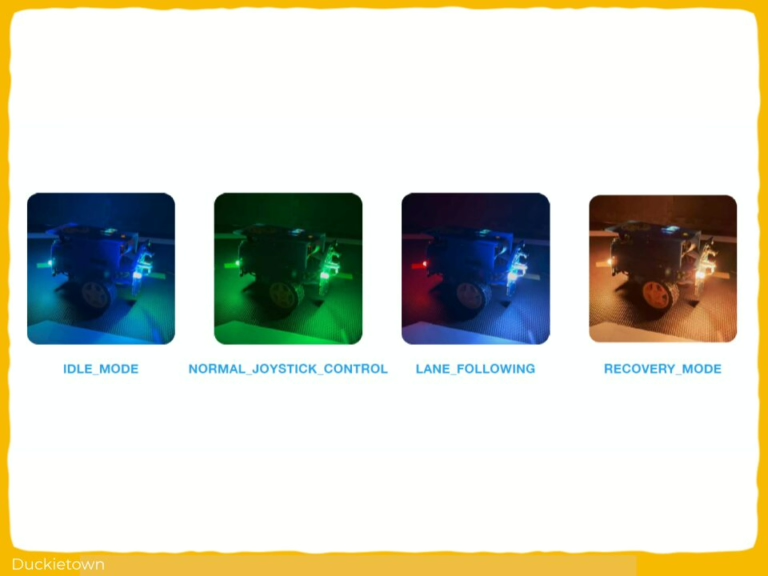
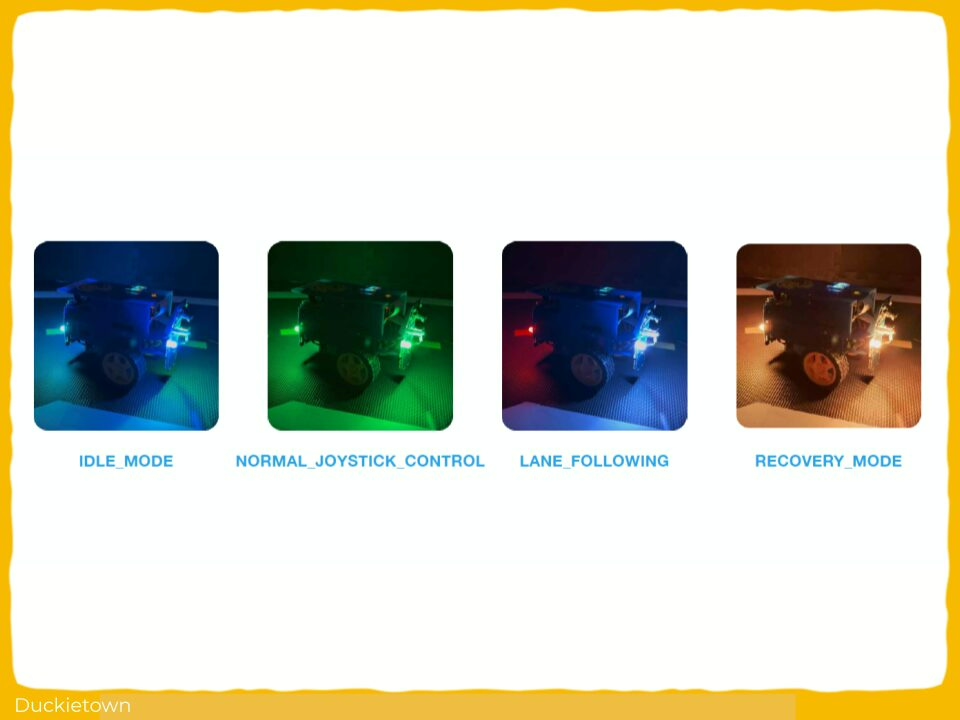
- Visual representation of the Duckiebot’s operational modes
-
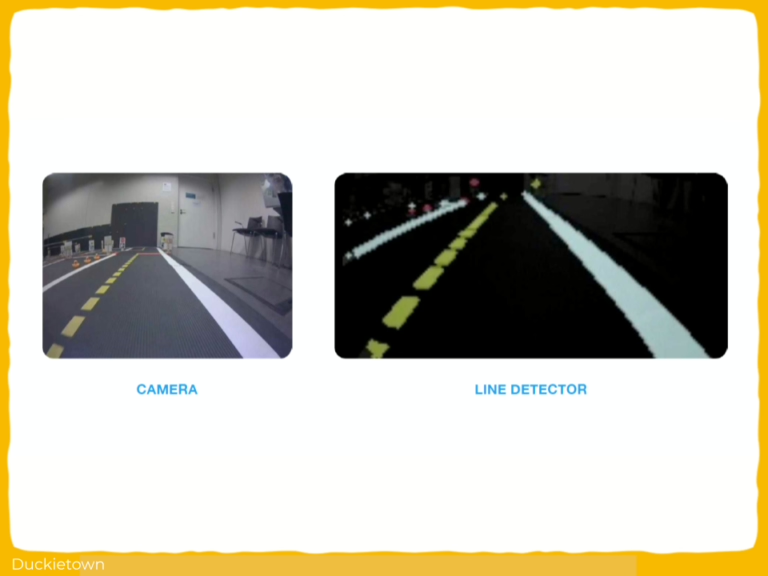
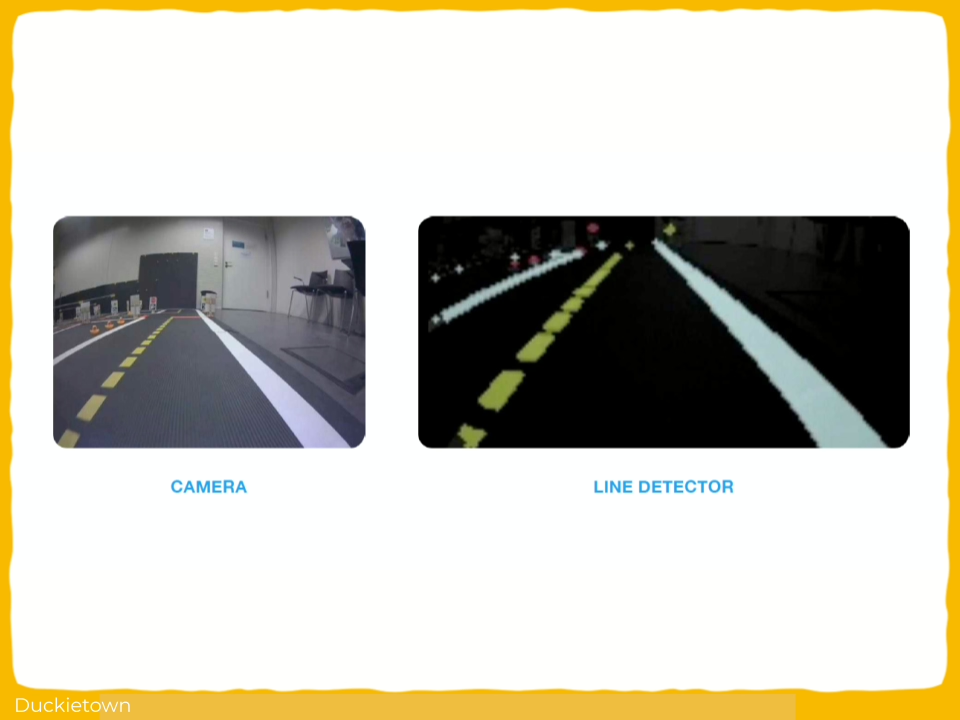
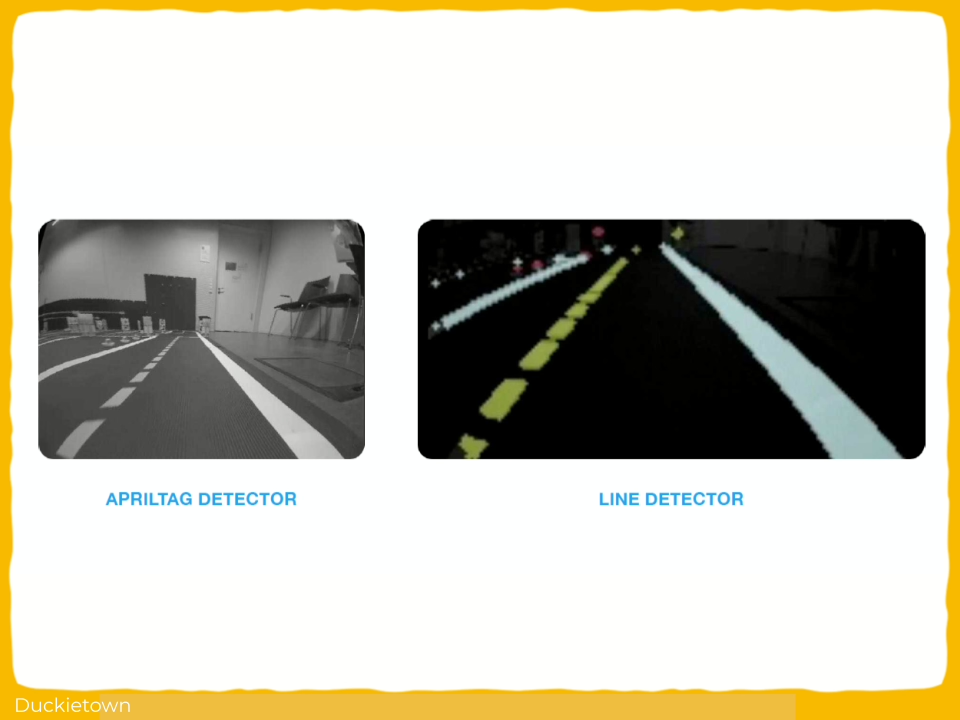
- Following the road using computer vision

-
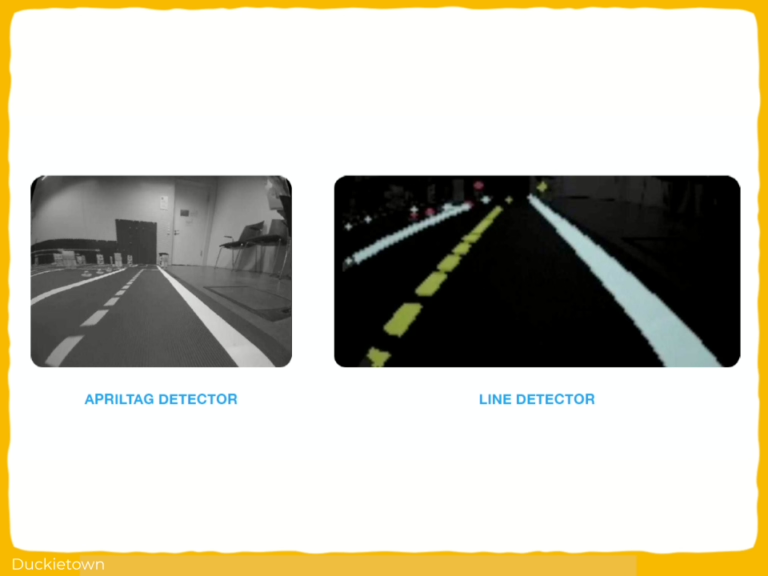
- Detecting and stopping at the stop line
-
- Detecting intersections and executing turns
-
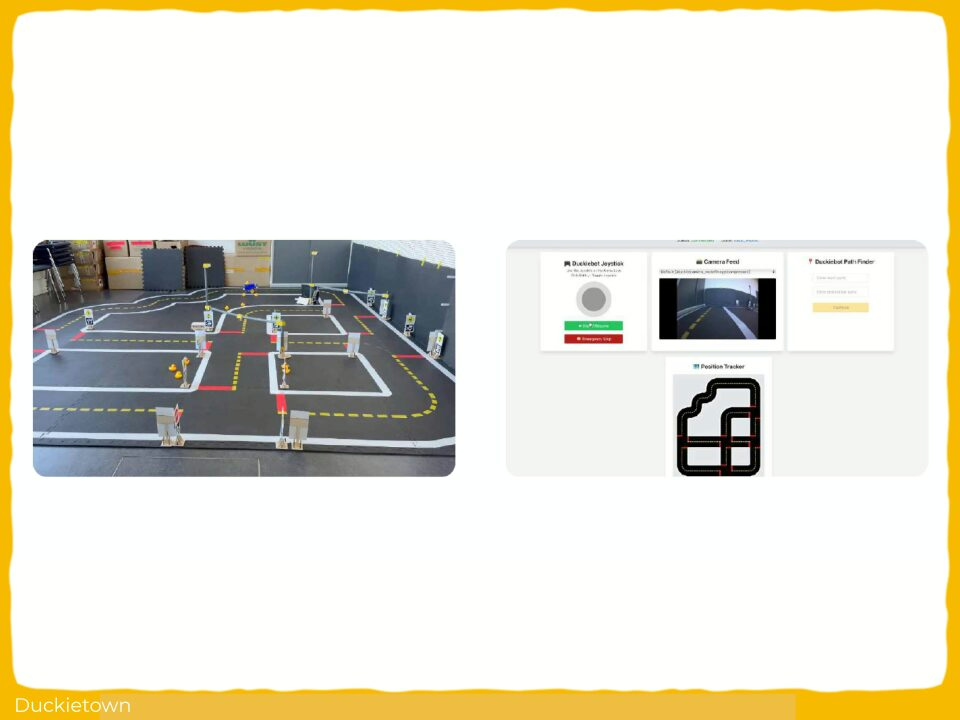
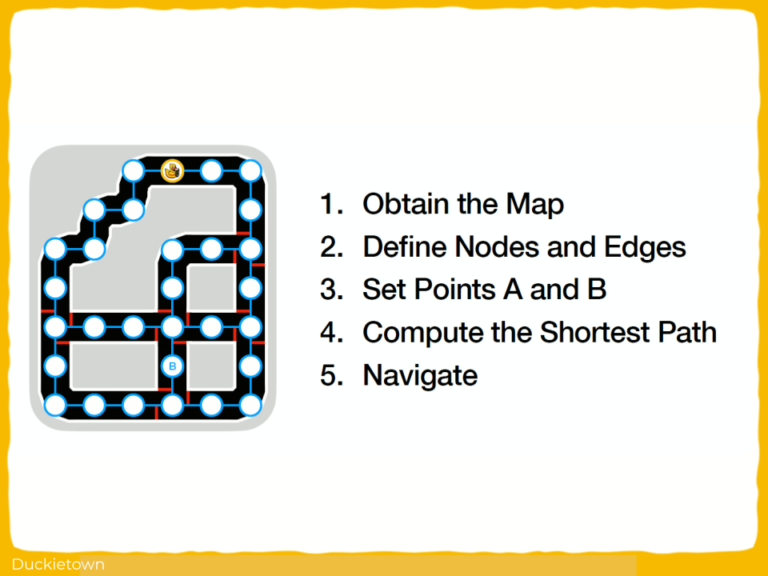
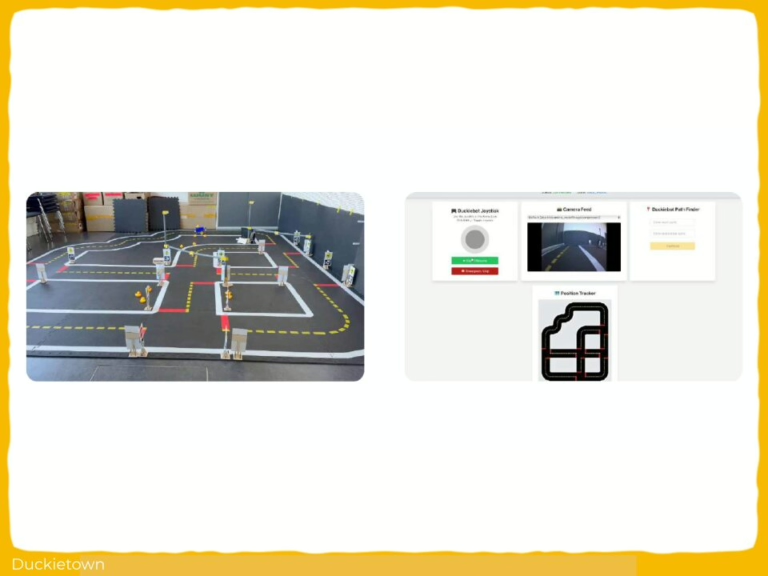
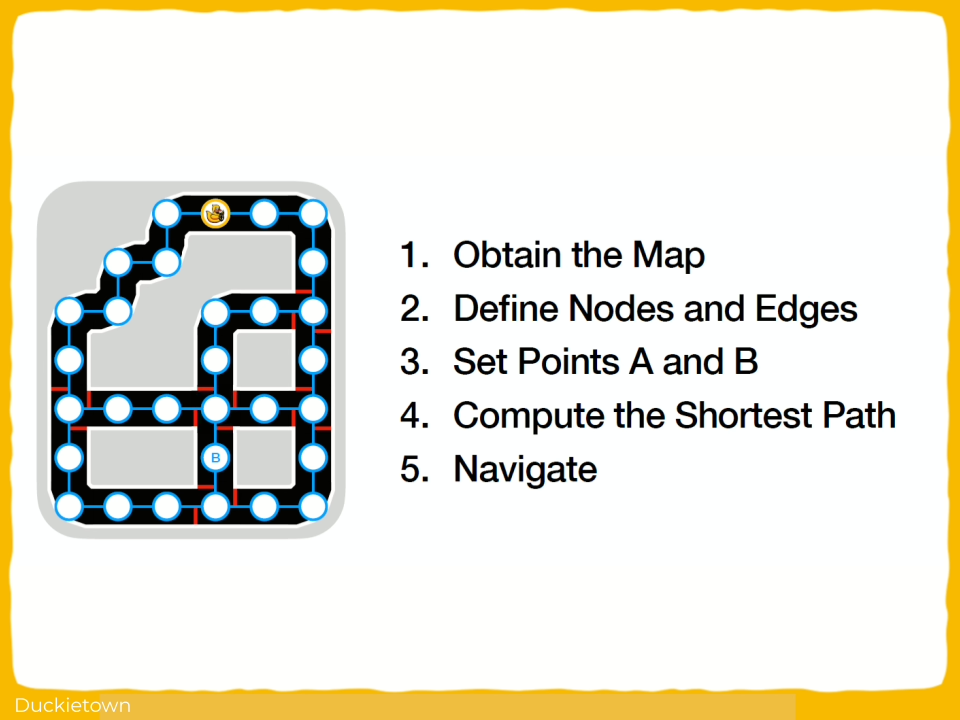
- Transforming Roads into a Navigable Network
-
- Navigation using Dijkstra’s Algorithm