-
 - Duckietown")
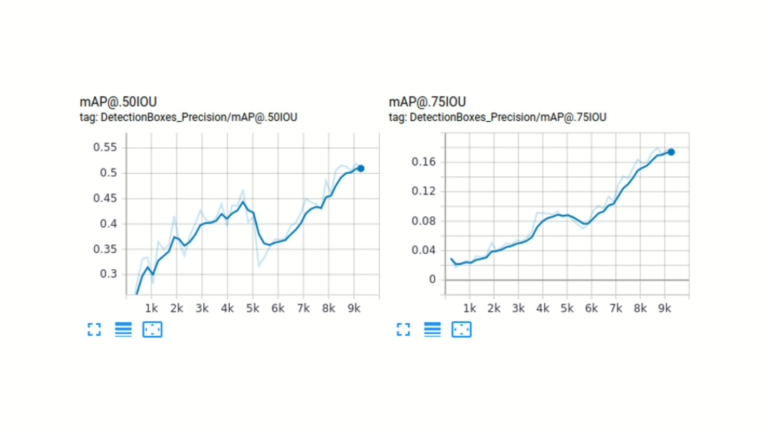
- SSD Model Performance (mAP)
 - Duckietown")
-
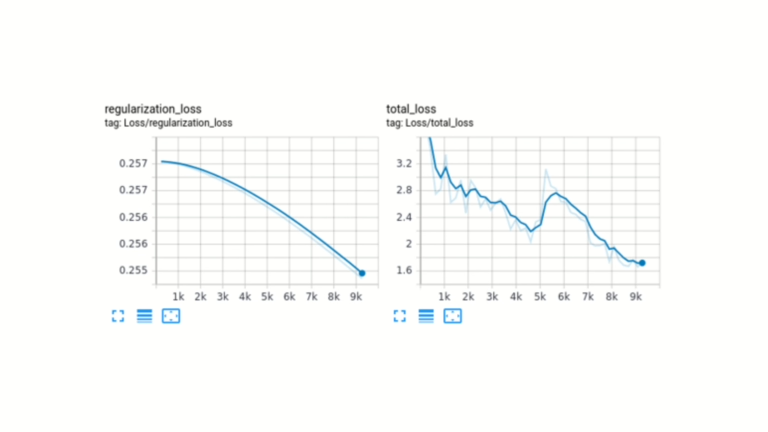
- SSD Model Loss Over Iterations

-
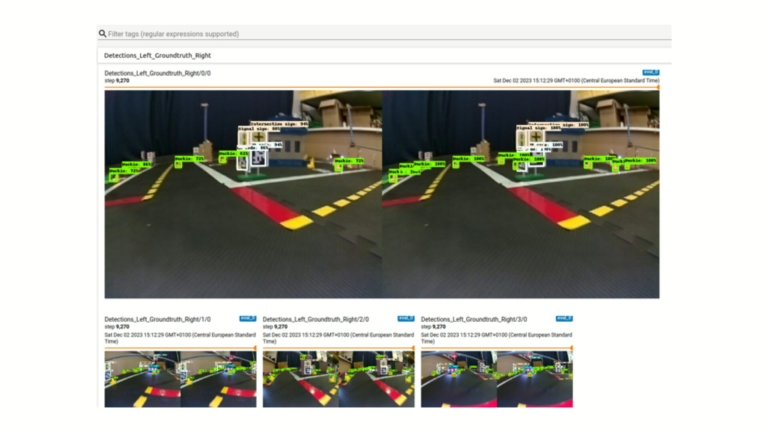
- Object Detection in Duckietown

-
- Labels of the baseline Model

-
- Labels of the new fine-tuned Model

-
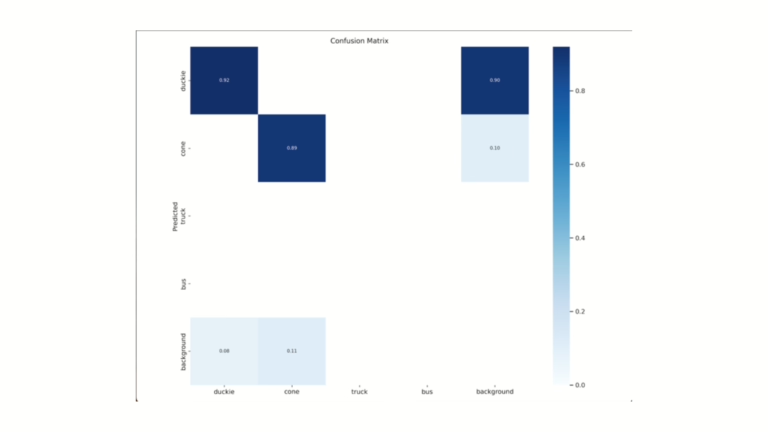
- Confusion Matrix of the baseline Model

-
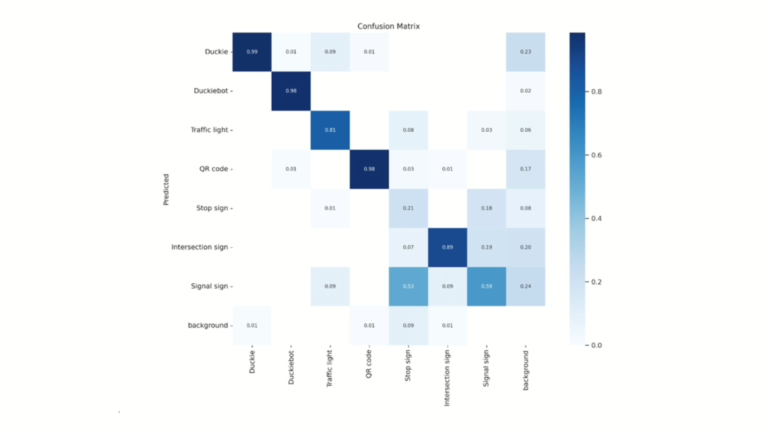
- Confusion Matrix of the new finetuned Model

-
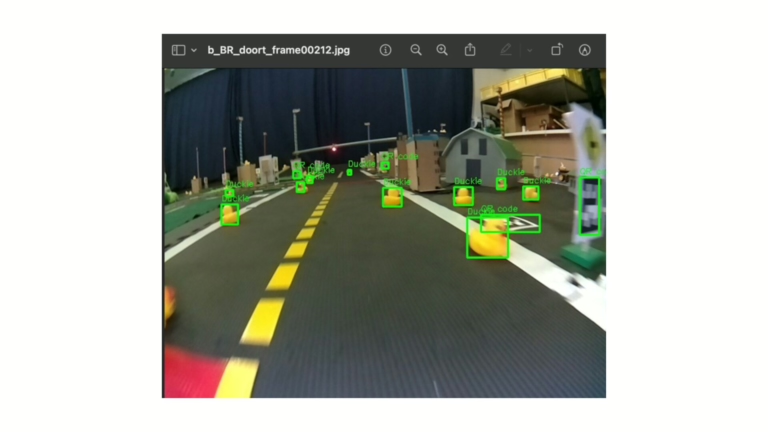
- Model Performance on real Duckietown environment

-
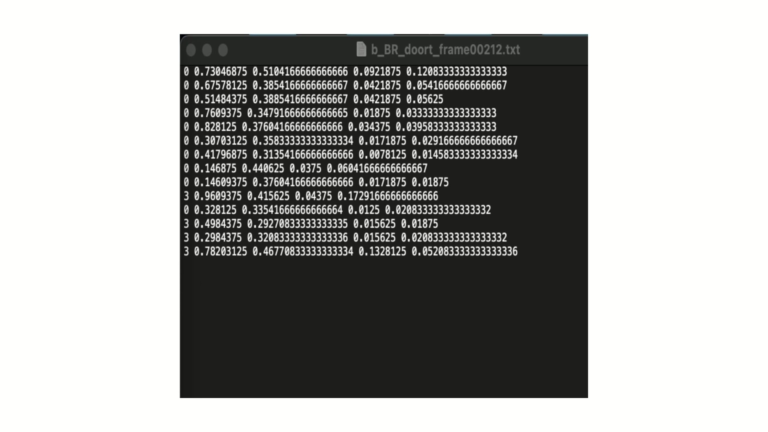
- Annotations format used by YOLO for output

-
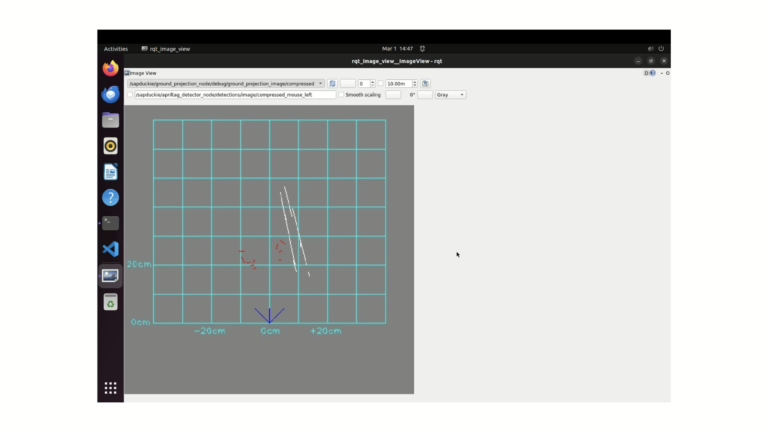
- Ground Projection for Path Tracking

-
- Edge Detection of Lane Boundaries

-
- Color detector for stop line filter

-
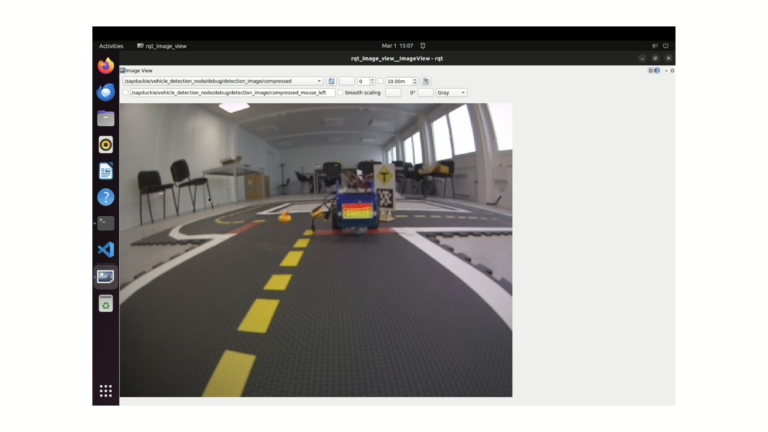
- Bot detector for Collision avoidance

-
- April Tag sign detection