-

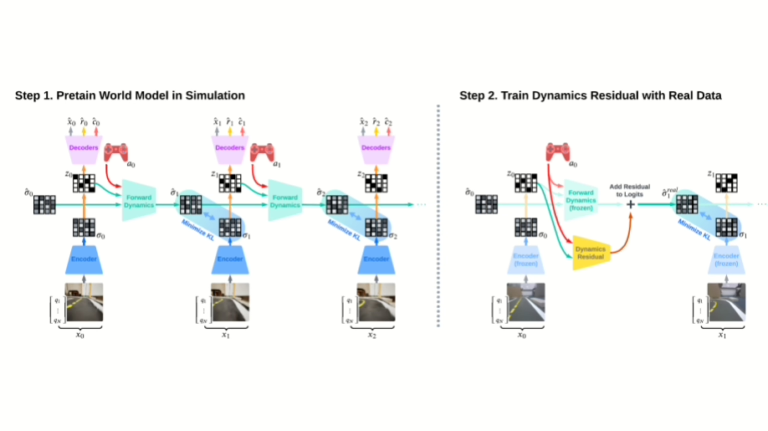
- DRAW and ReDRAW World Model Training with Latent-State Dynamics Residuals

-

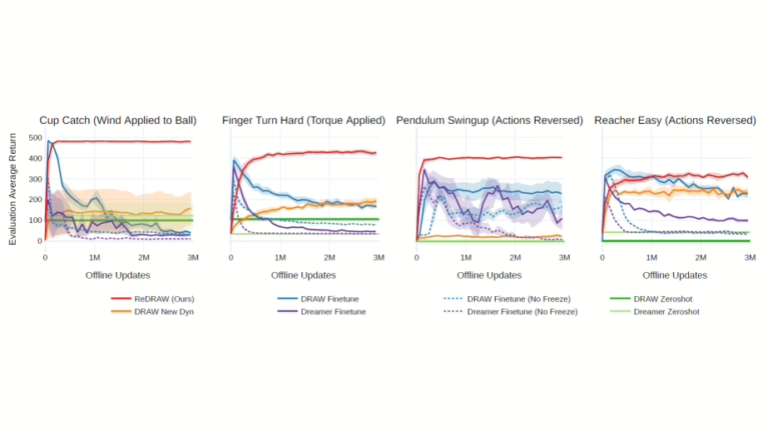
- ReDRAW Performance on Dynamics Transfer in DMC Tasks

-

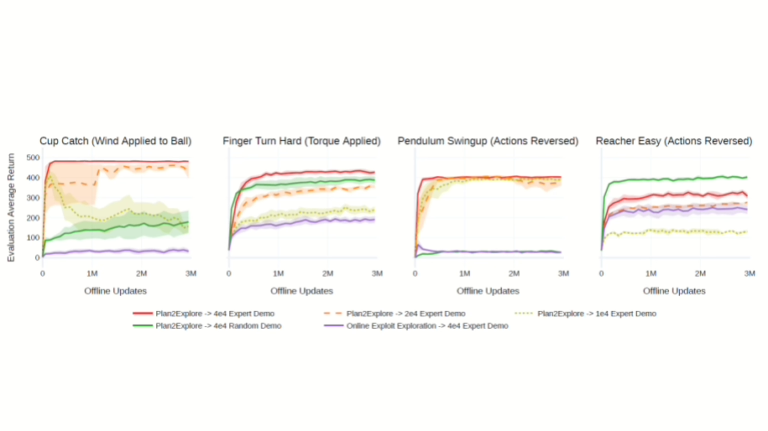
- Effect of Data Size and Source Policy on ReDRAW Transfer Performance

-

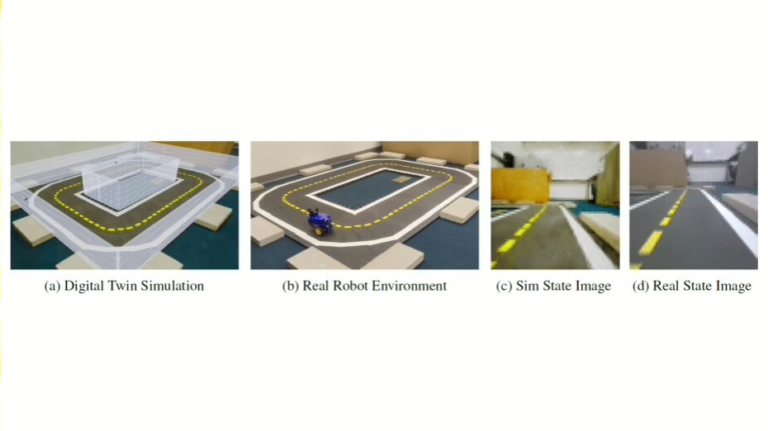
- Sim-to-Real Transfer on Duckiebot Using Latent-State Dynamics Residuals

 Lanier - Duckietown")






