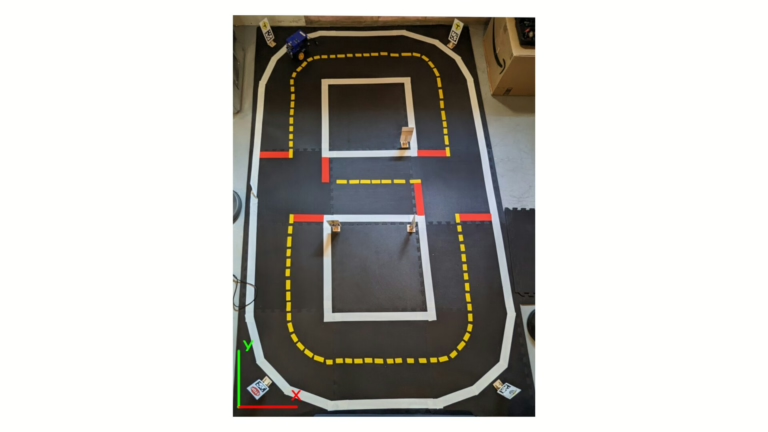
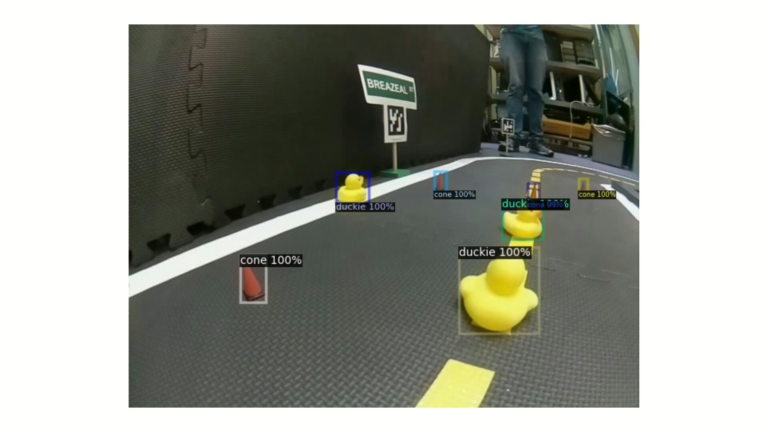
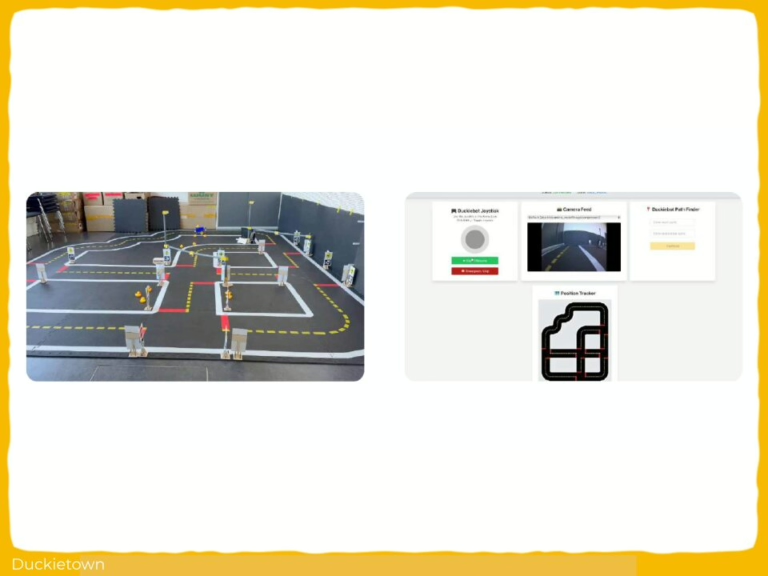
This project from students at TUM (Technische Universität of Munich) builds on the preexisting Duckietown autonomy stack to add/reintegrate/improve upon much-needed autonomous navigation features: improved control (pure pursuit instead of PID), red stop line detection, AprilTag detection, intersection navigation, and obstacle detection (using YOLO v3), making Duckietowns more complex and interesting!
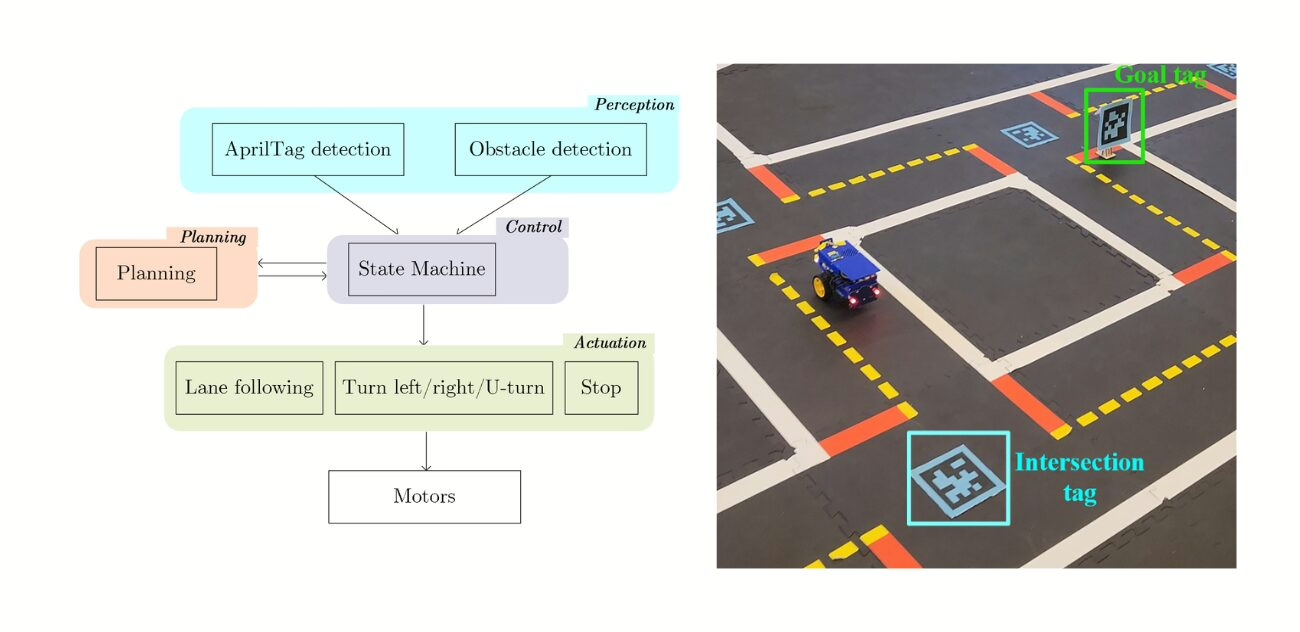
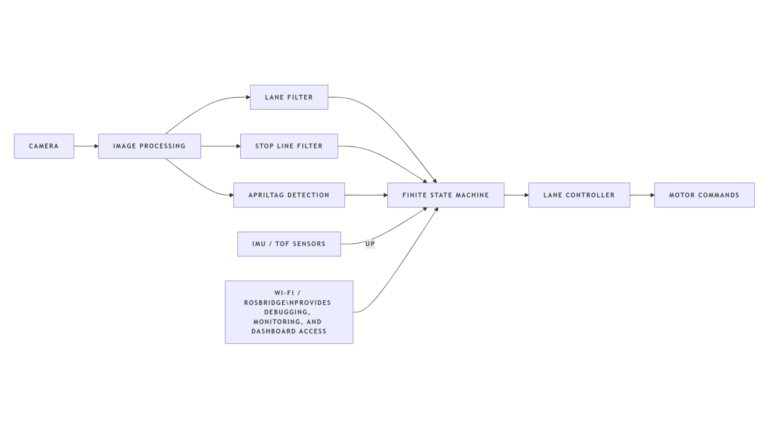
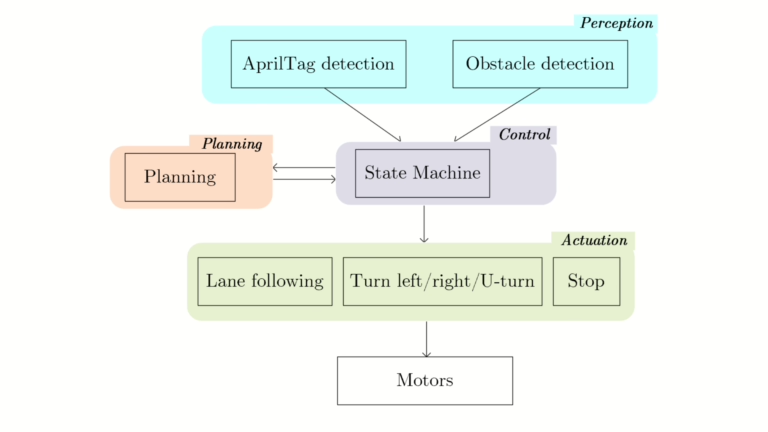
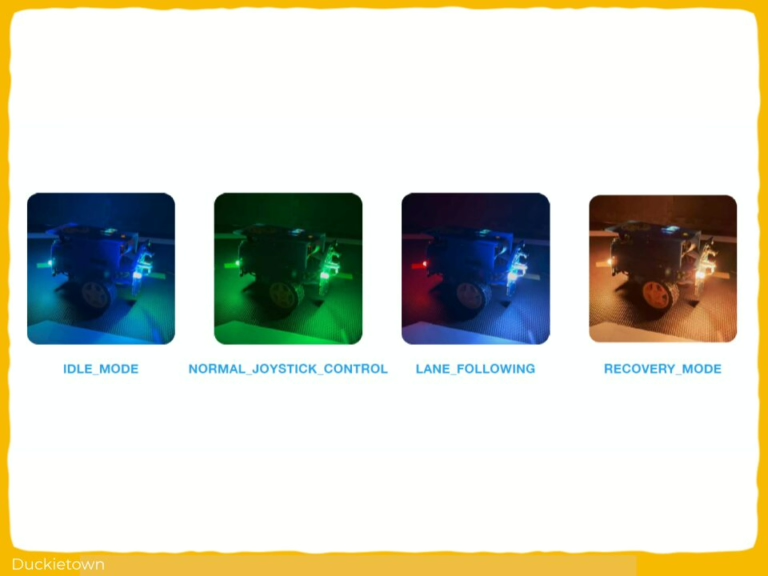
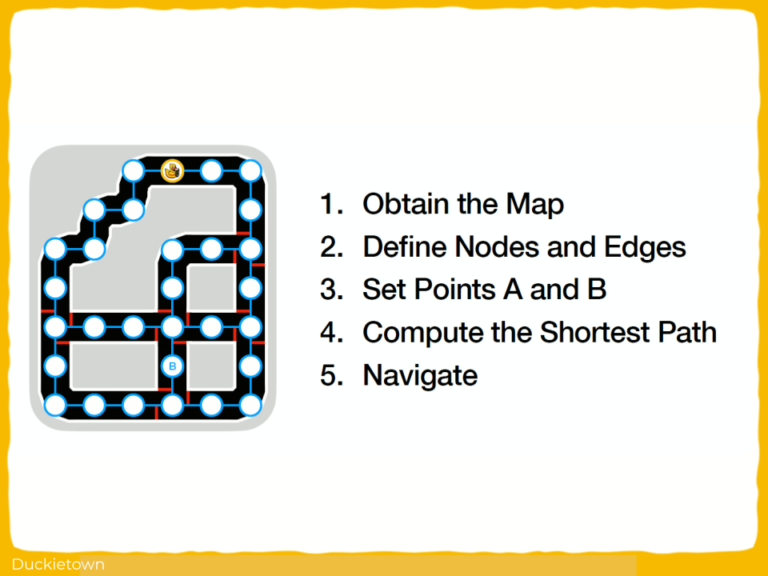
The resulting agent includes modules for lane following, stop line detection, and intersection handling using AprilTags, following the legacy infrastructure of Duckietown.
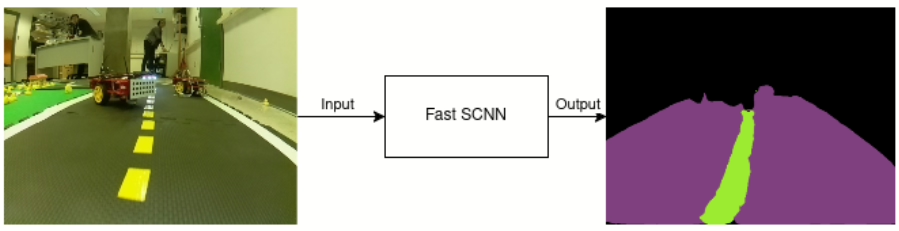
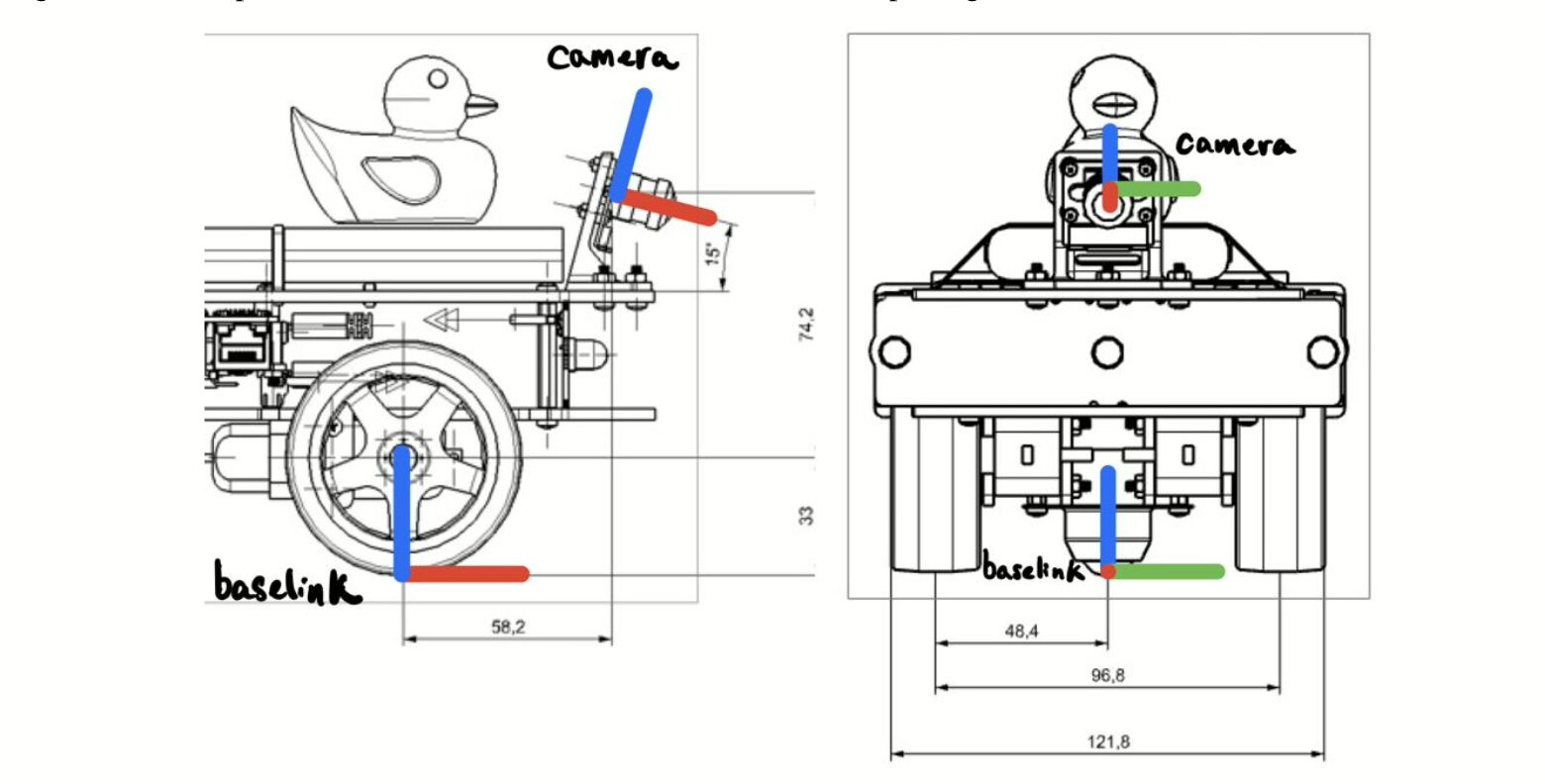
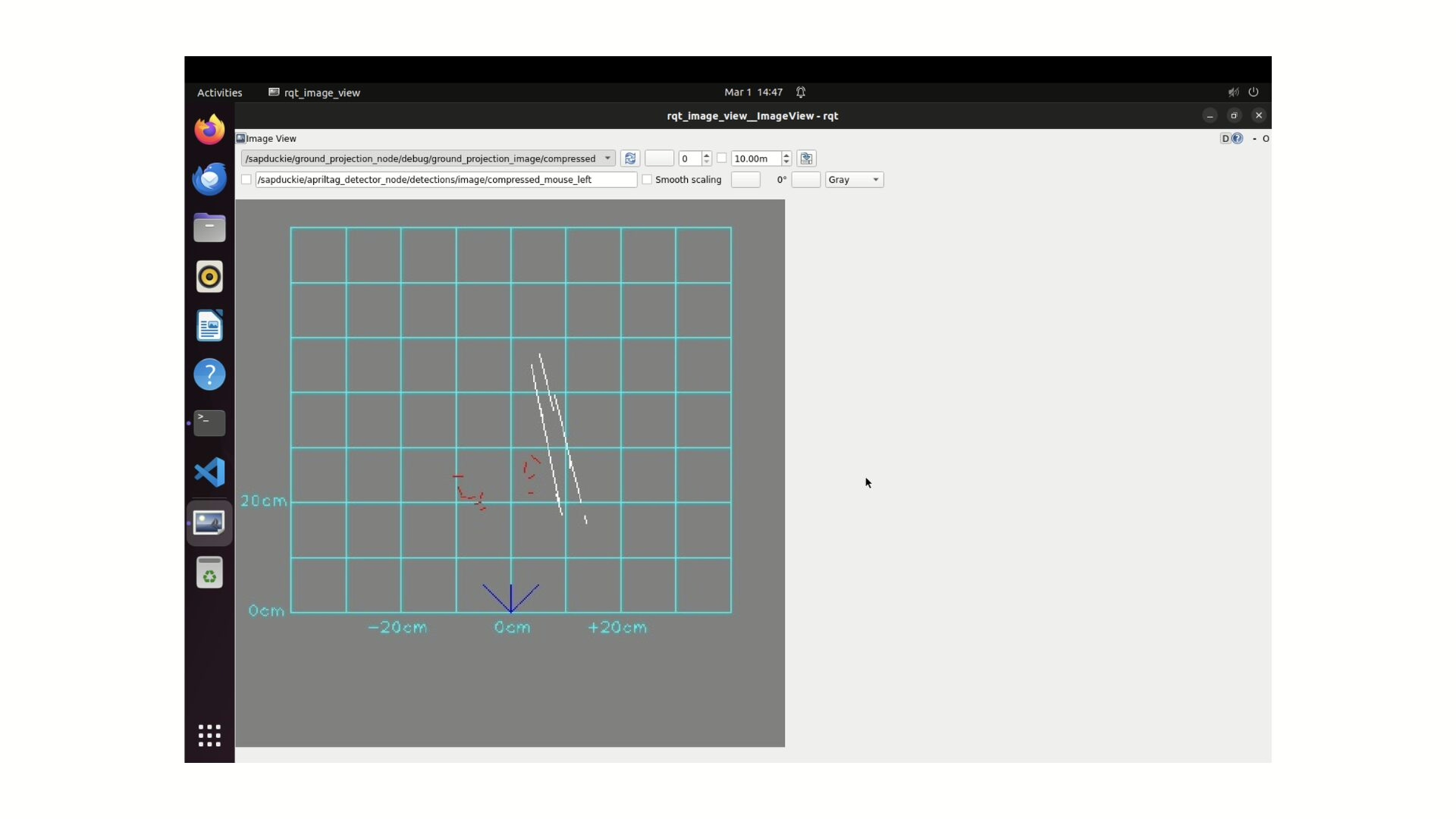
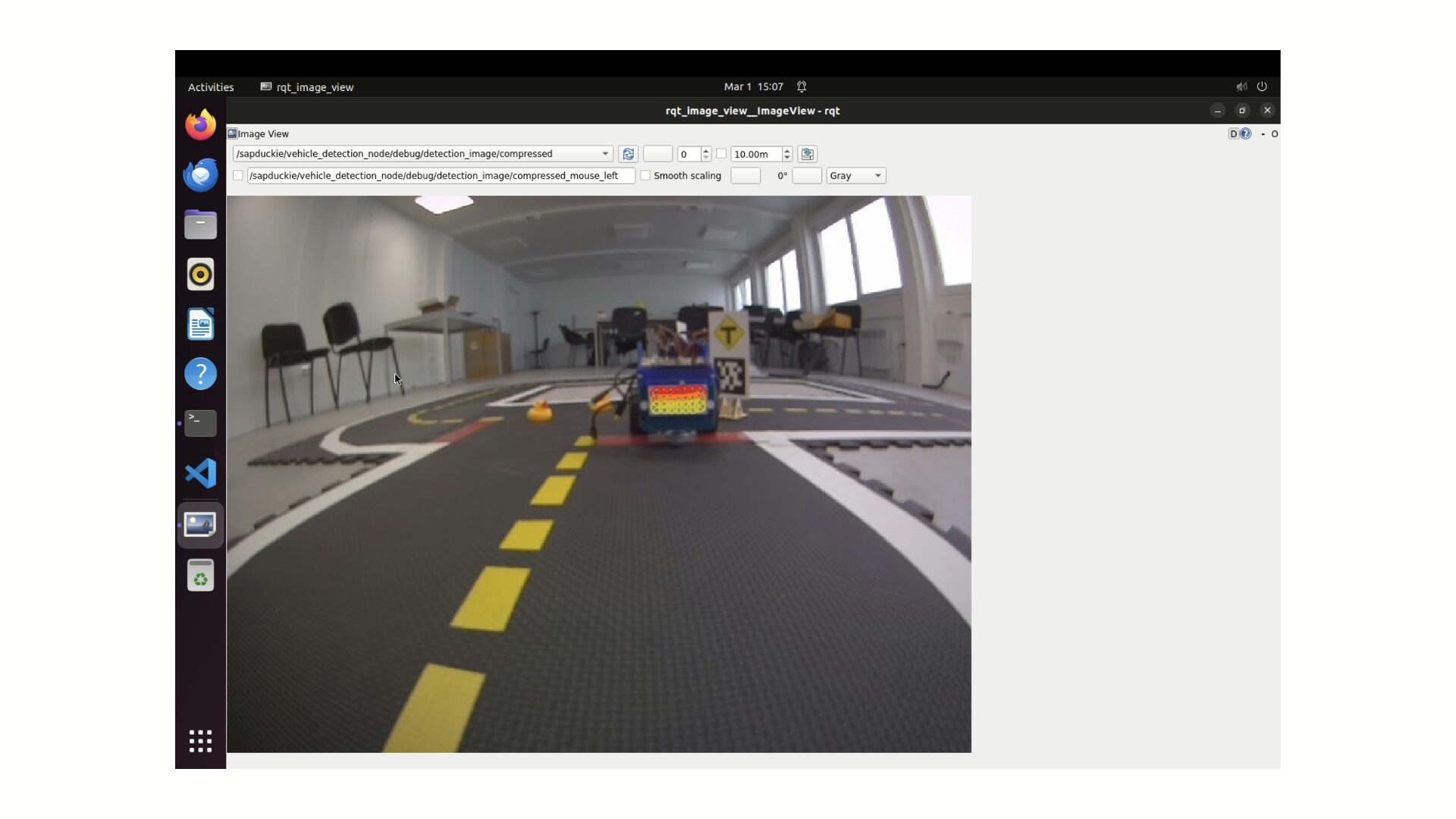
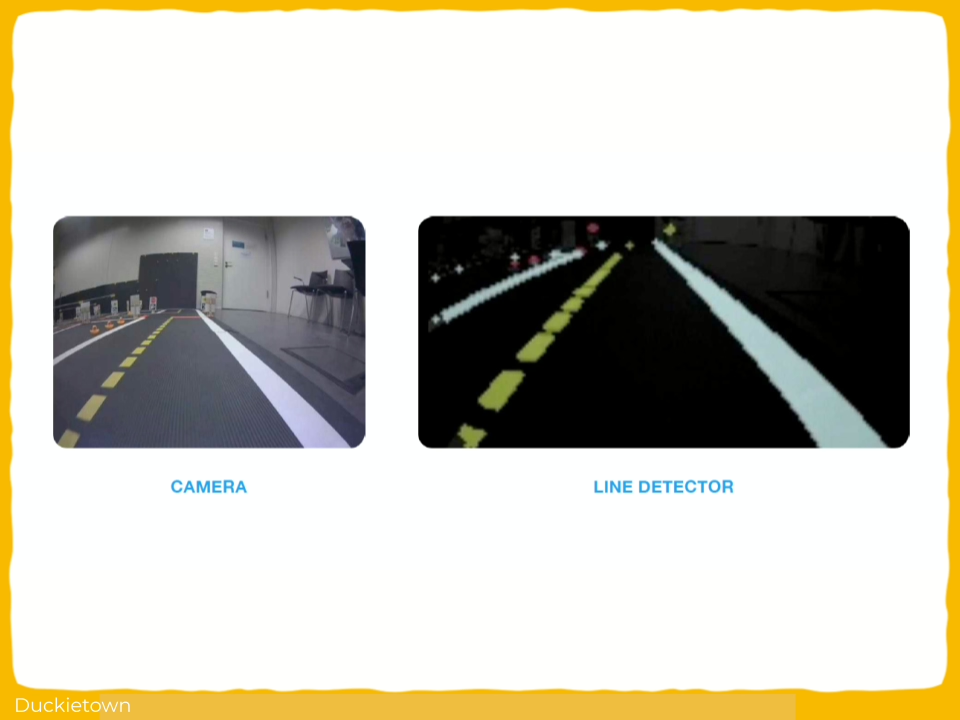
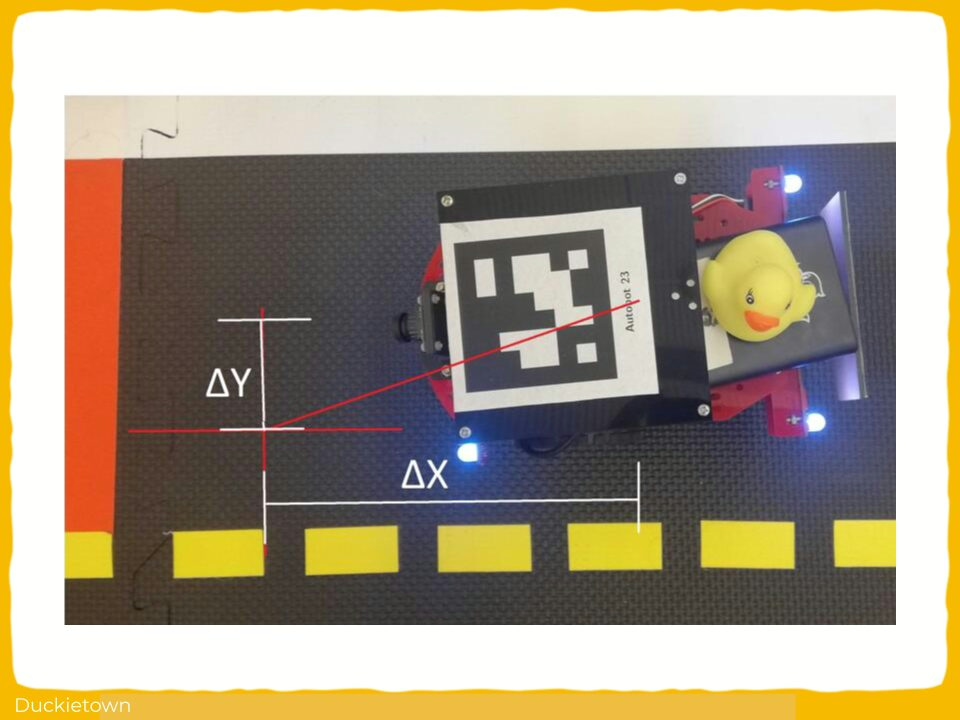
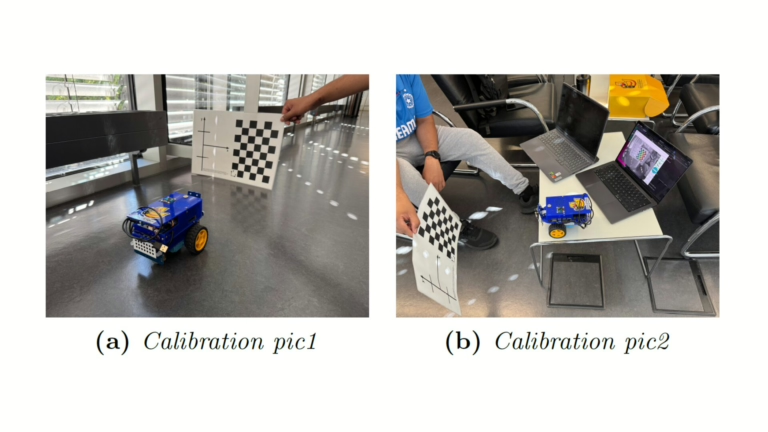
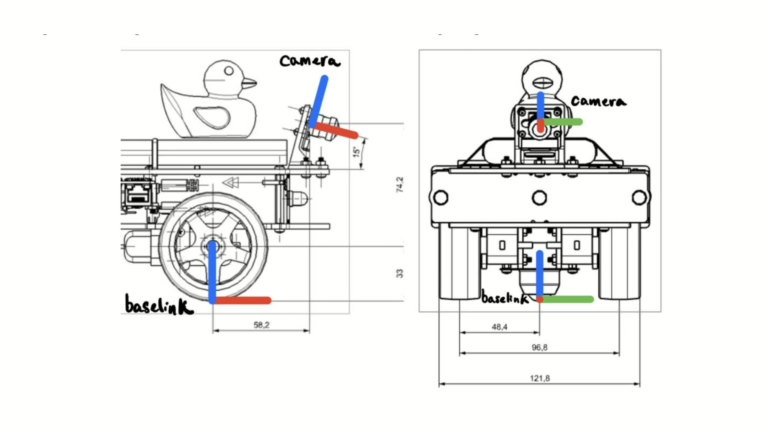
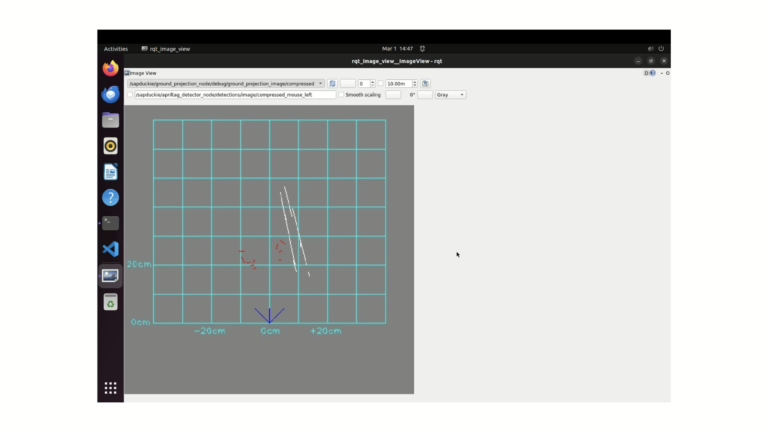
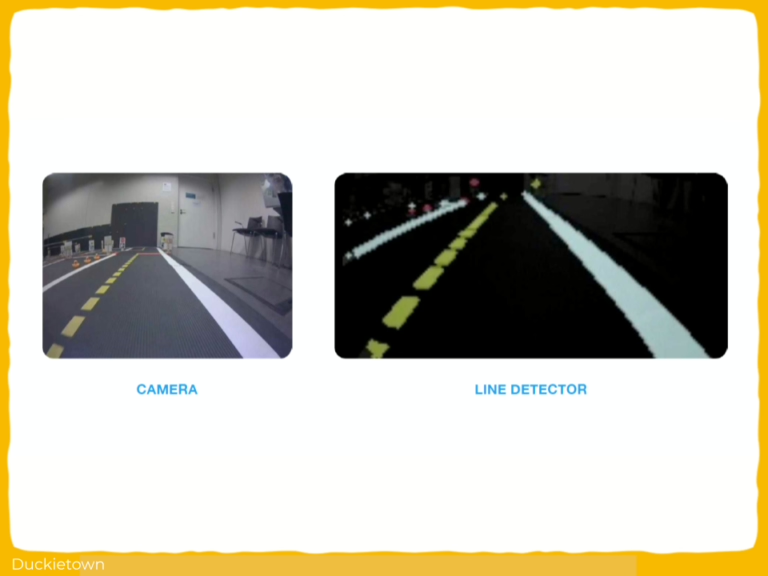
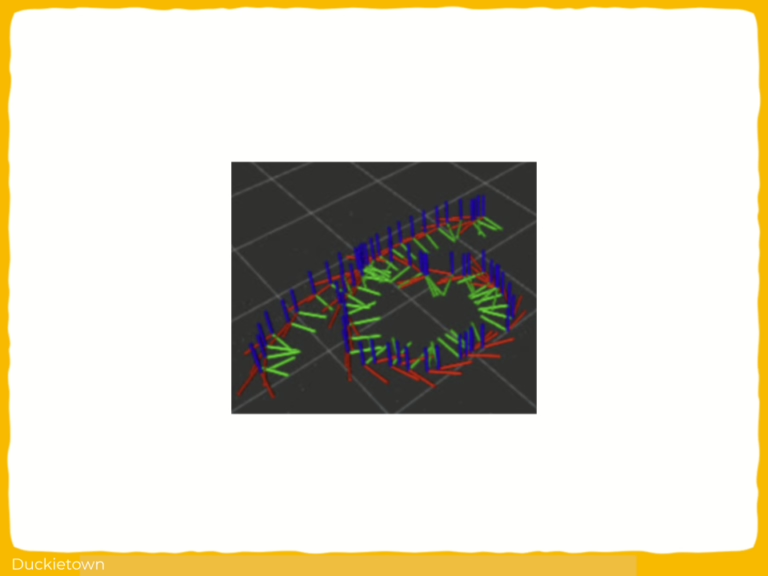
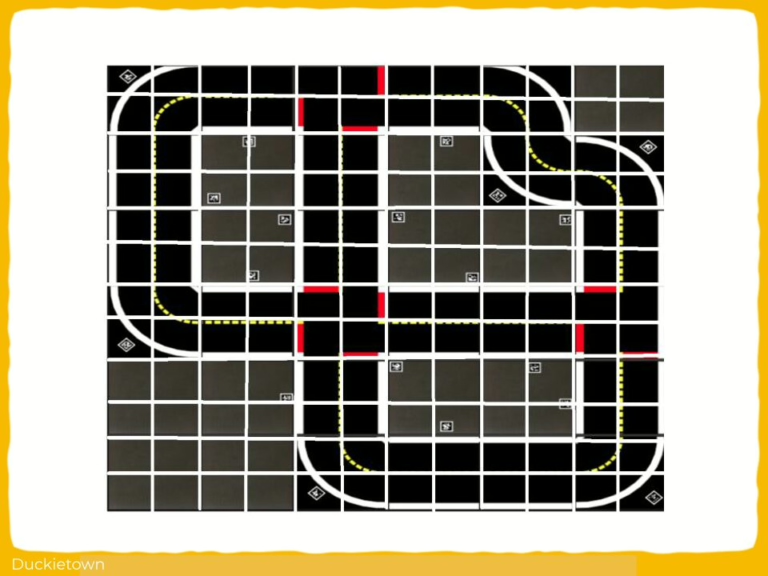
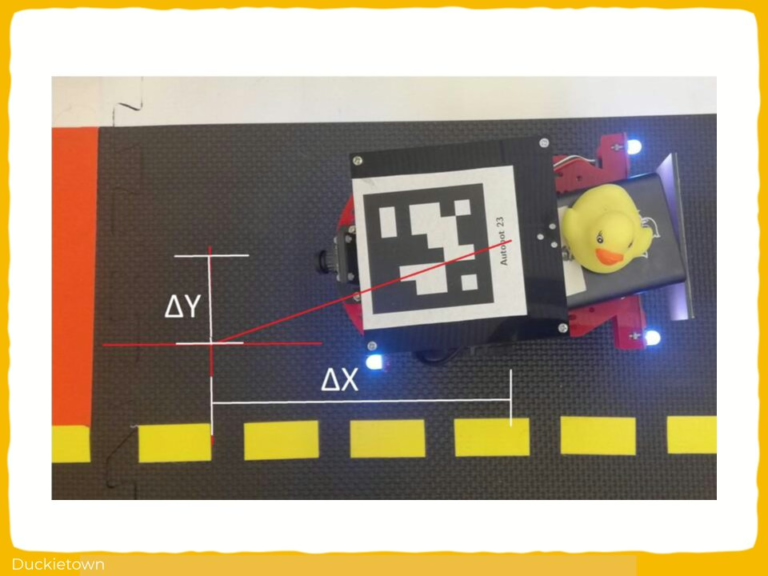
The autonomy pipeline relies heavily on vision as the primary means of perception: lane edges are projected from image space to the ground plane using inverse perspective mapping learned after running a camera calibration procedure.
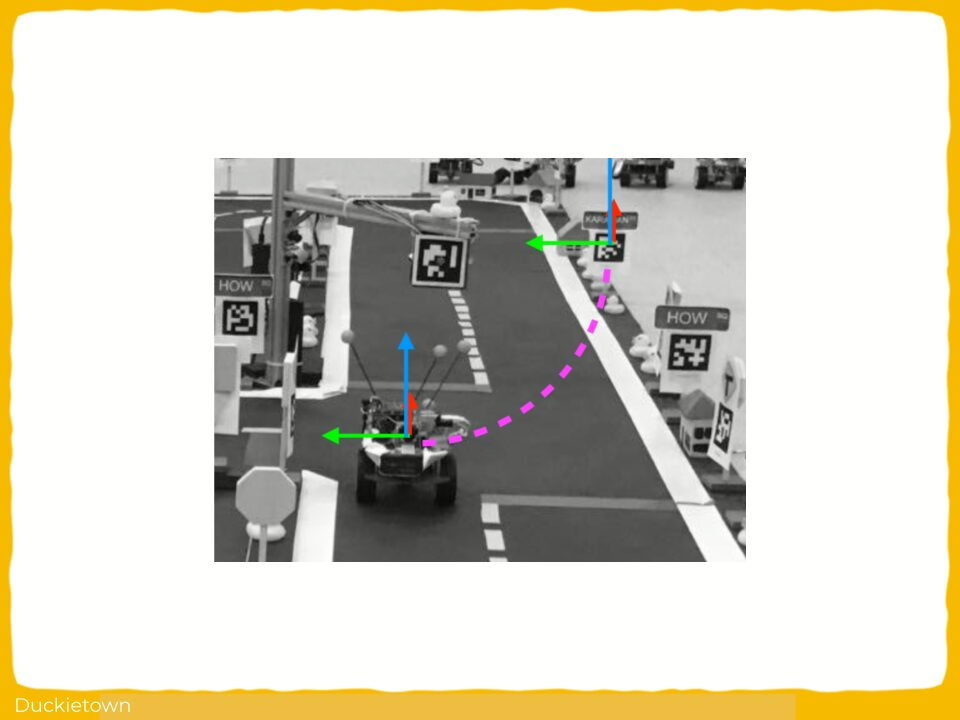
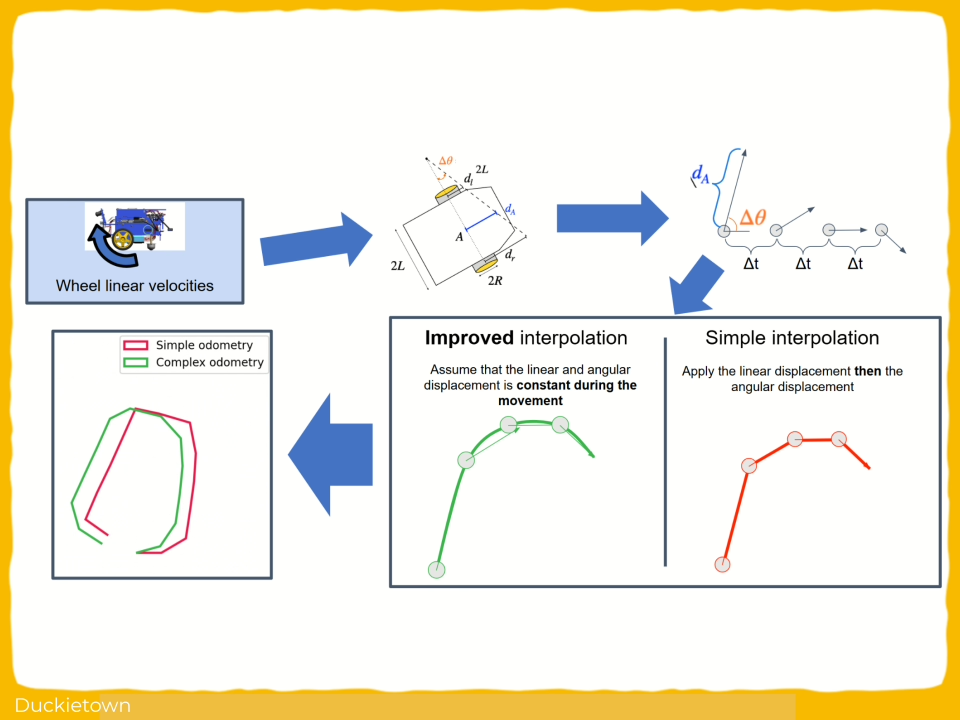
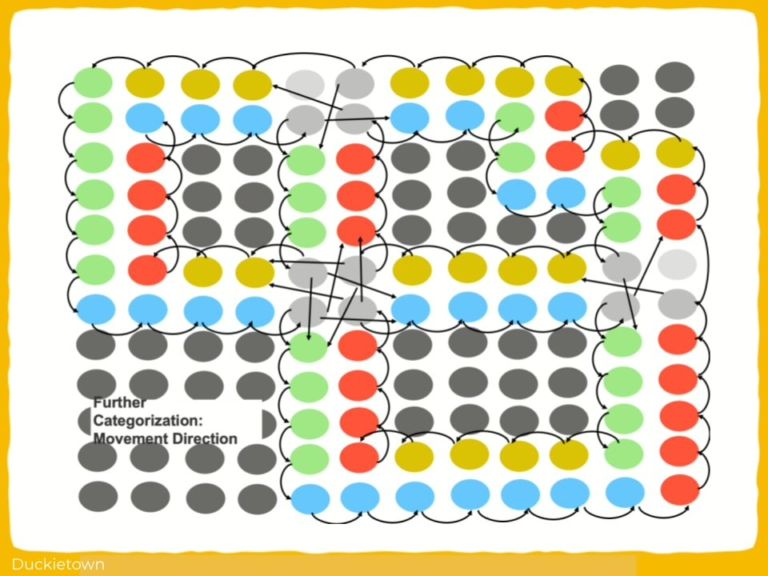
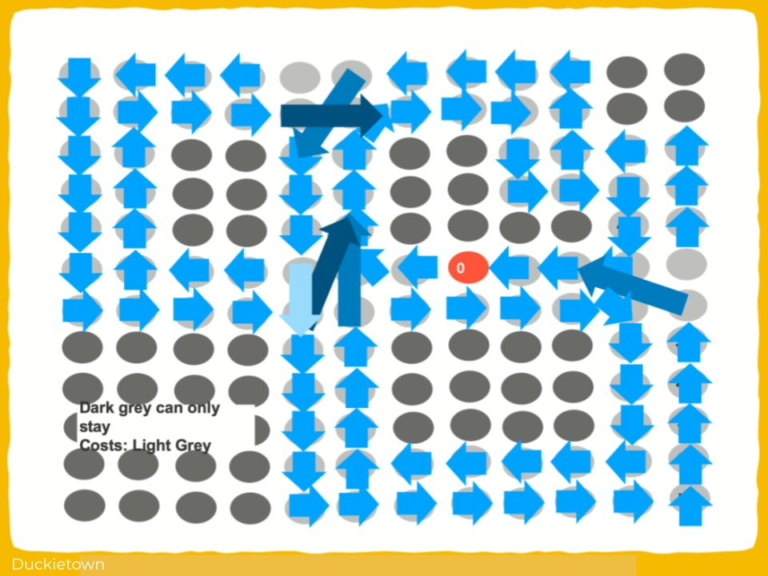
The Duckiebot then estimates a dynamic target point by offsetting yellow or white lane markers depending on visibility. The curvature is computed based on the geometric relation between the Duckiebot and the goal point, and the steering command is derived from this curvature.
The Duckiebot velocity and angular velocity are then modulated using a second-degree polynomial function based on detected path geometry.
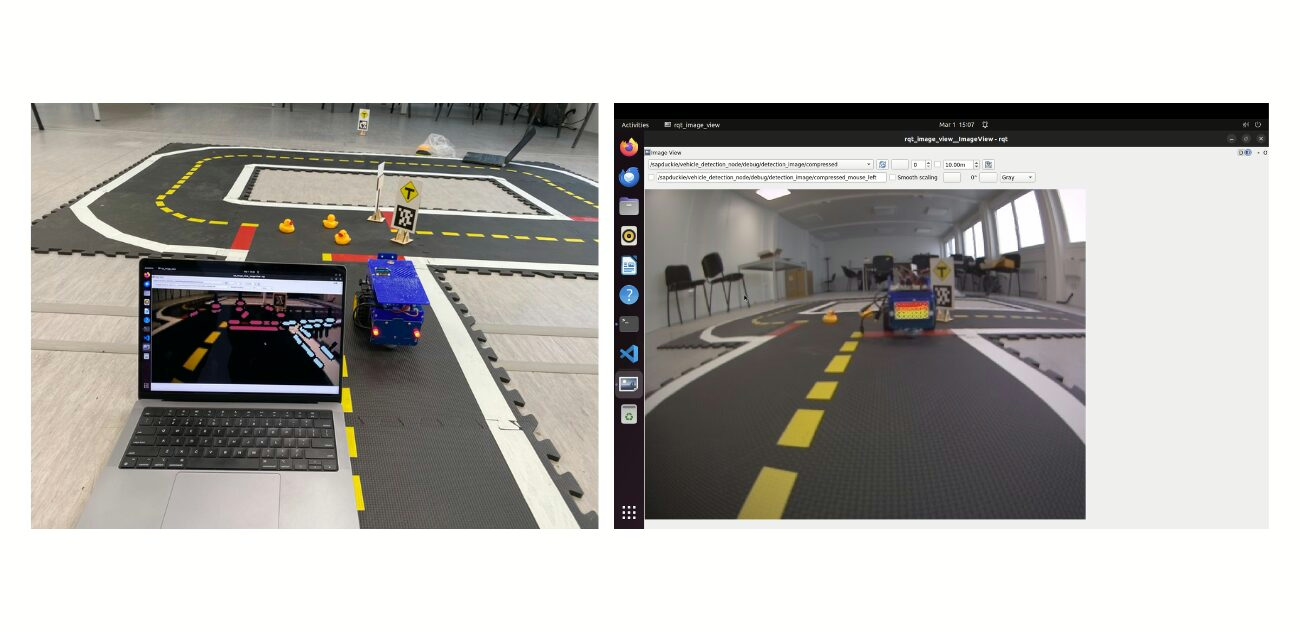
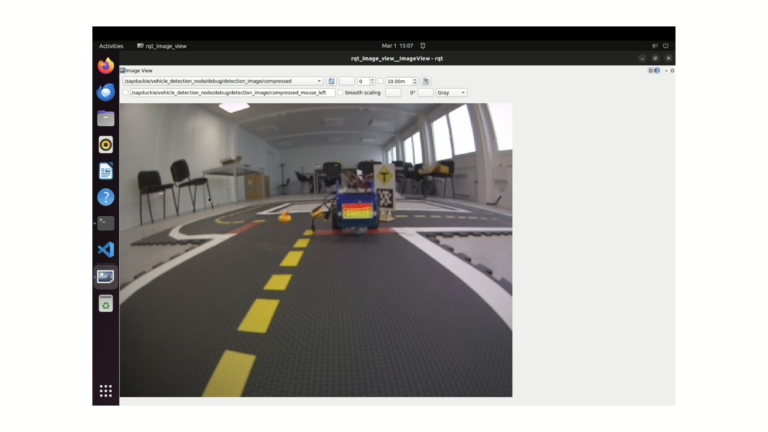
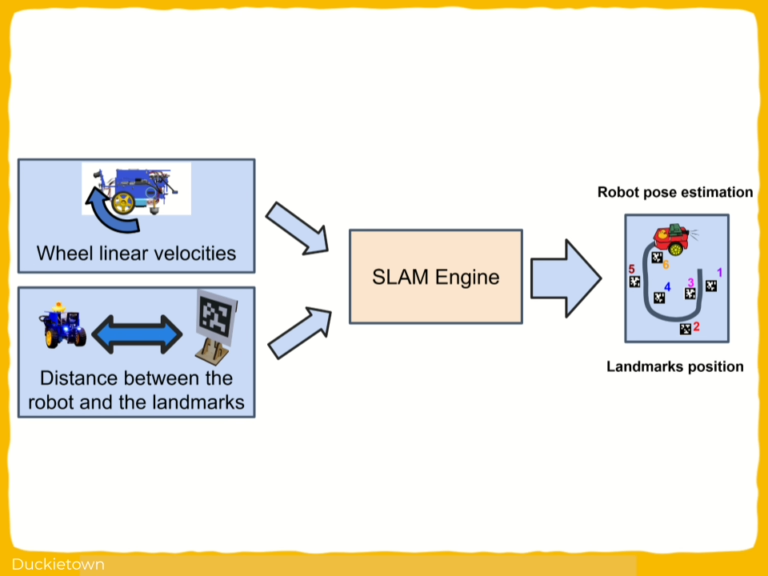
Visual input from an onboard monocular camera is processed through a lane filter with adaptive Gaussian variance scaling relative to frame timing.
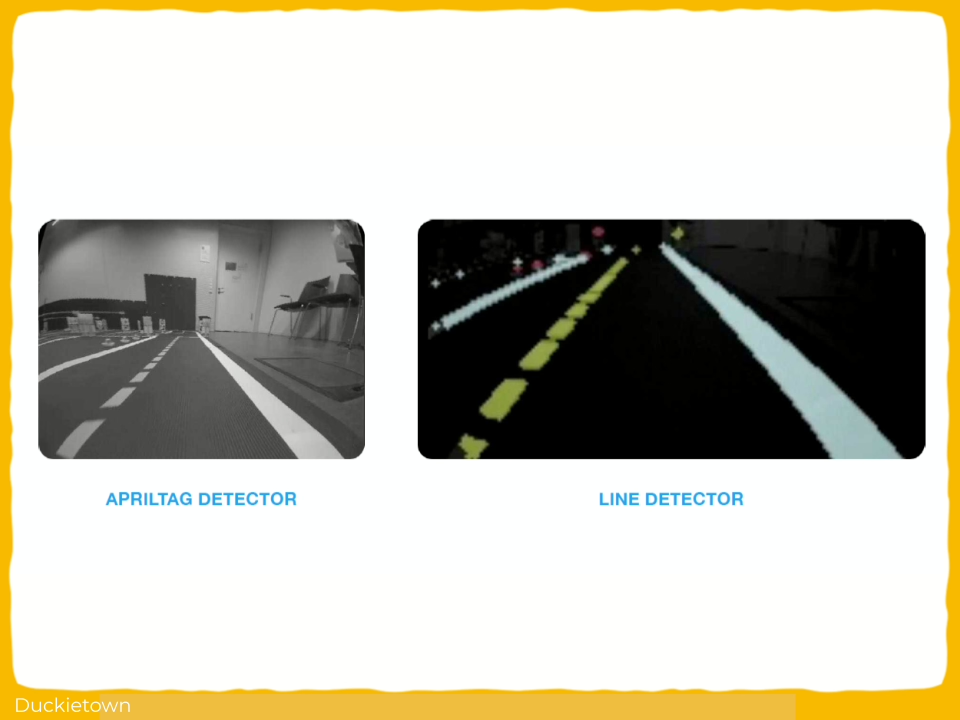
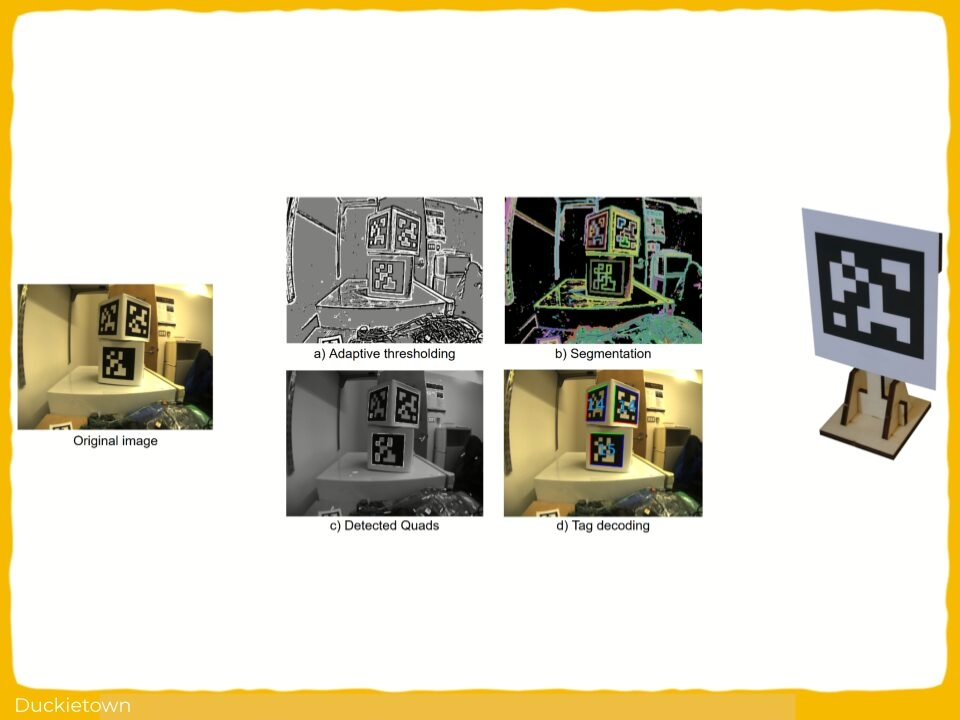
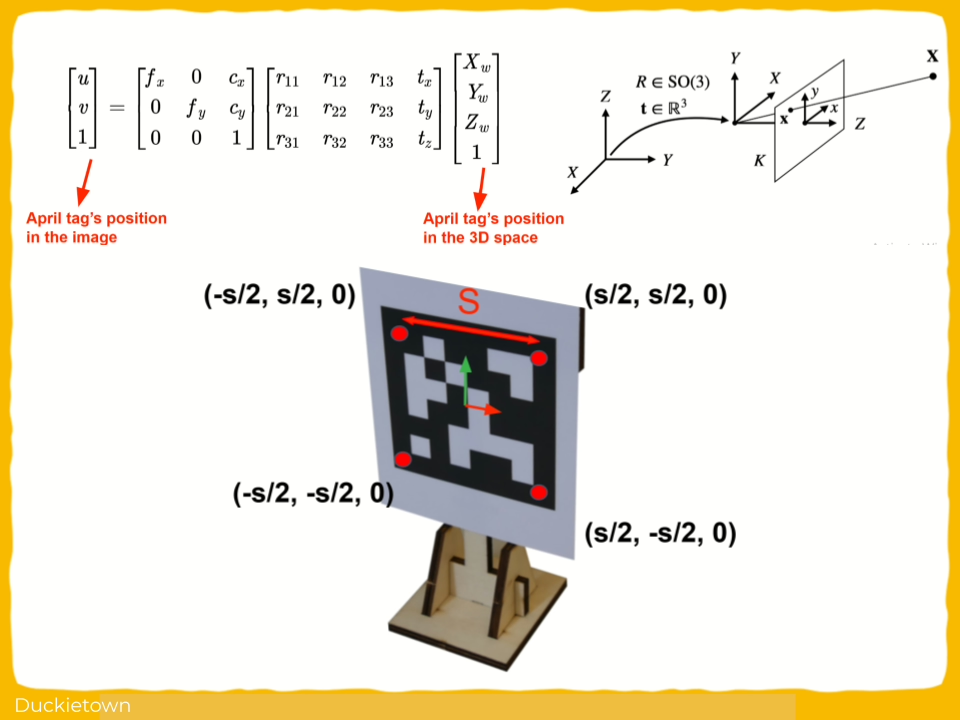
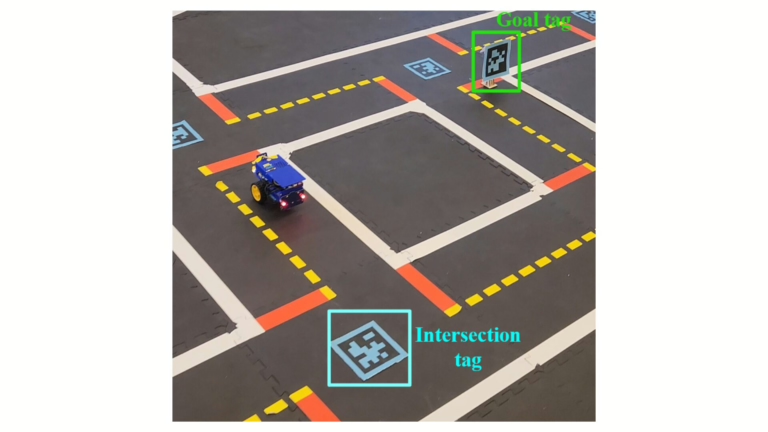
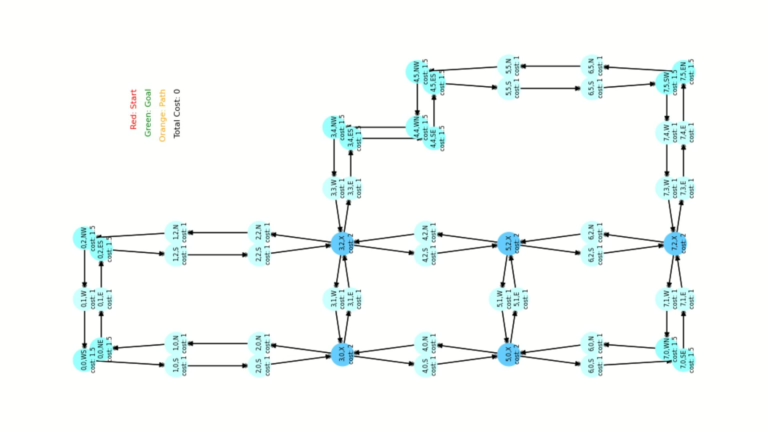
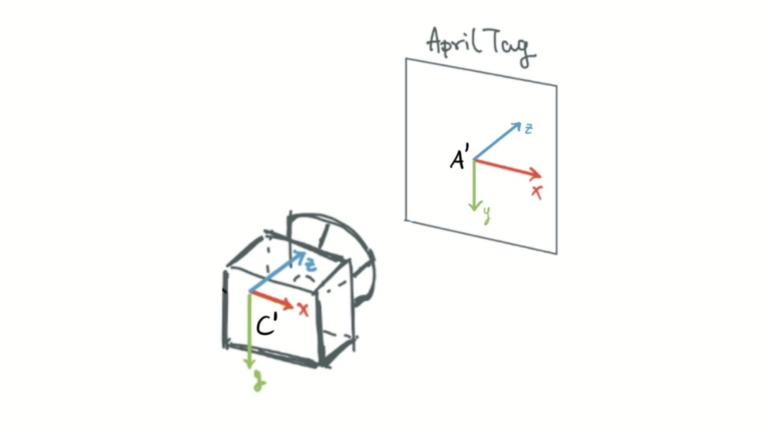
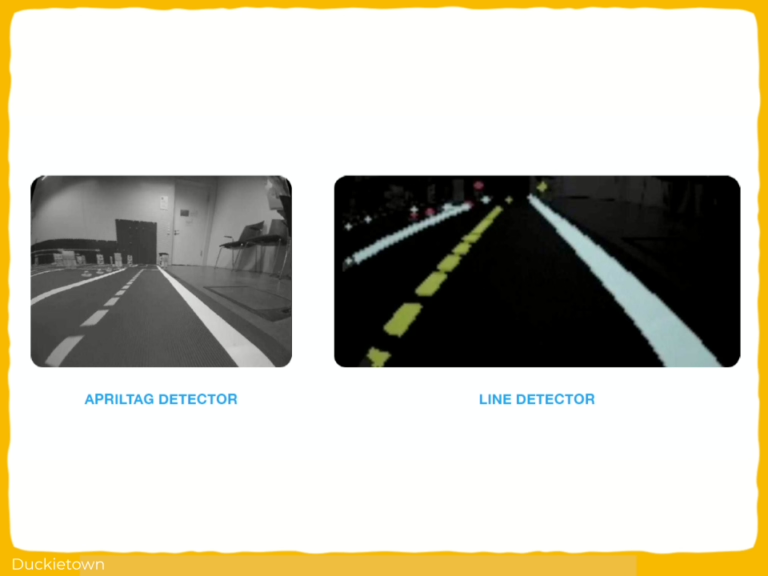
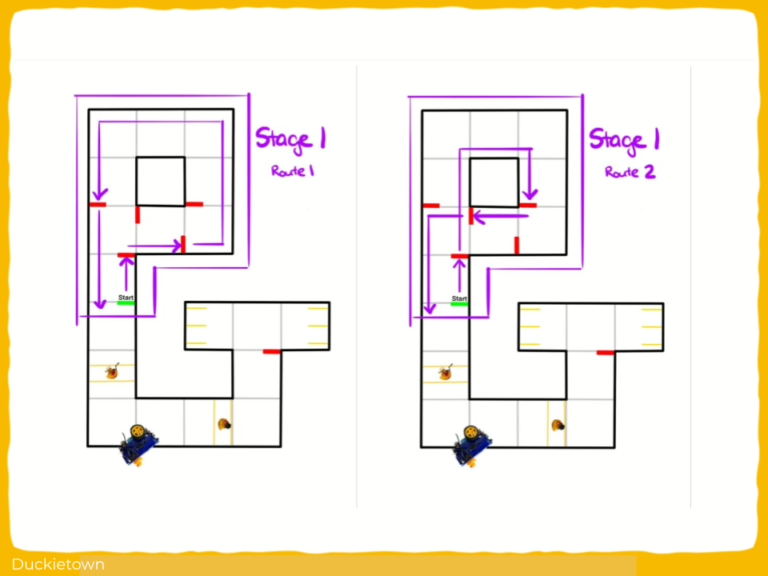
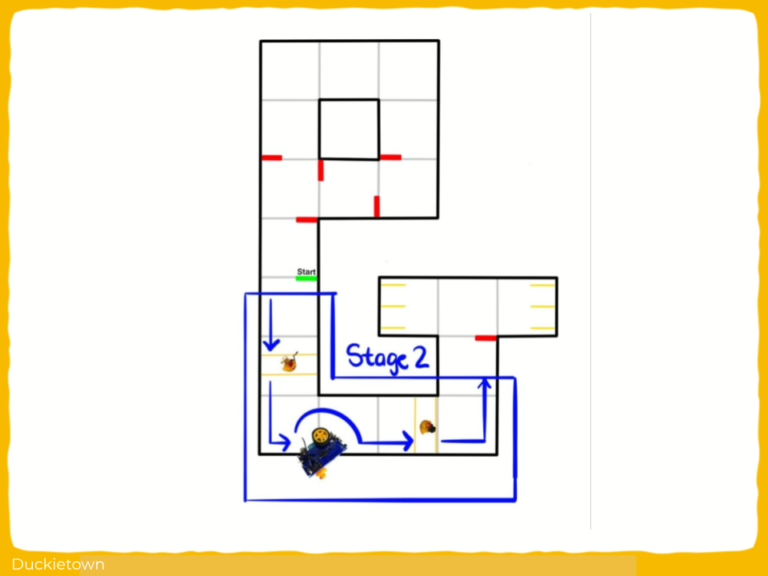
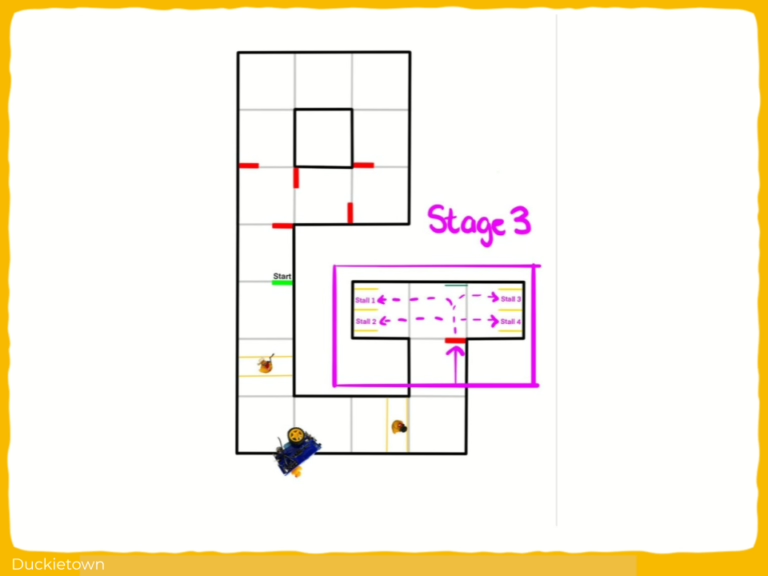
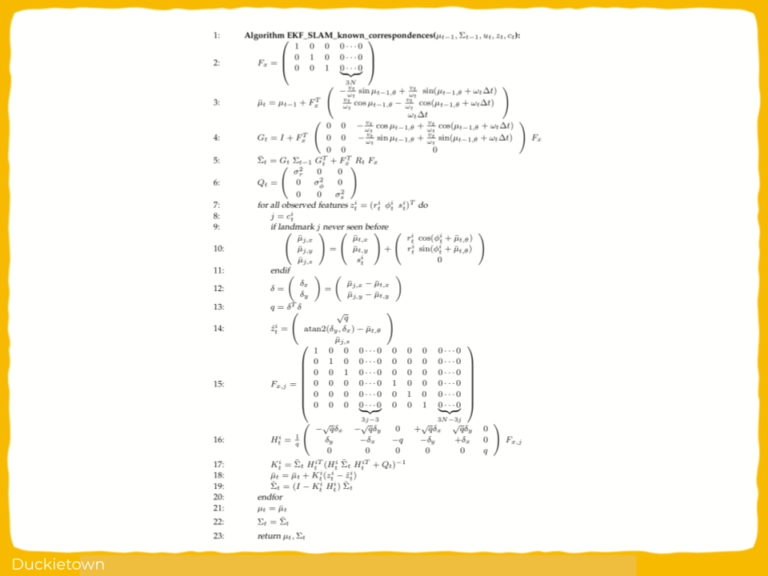
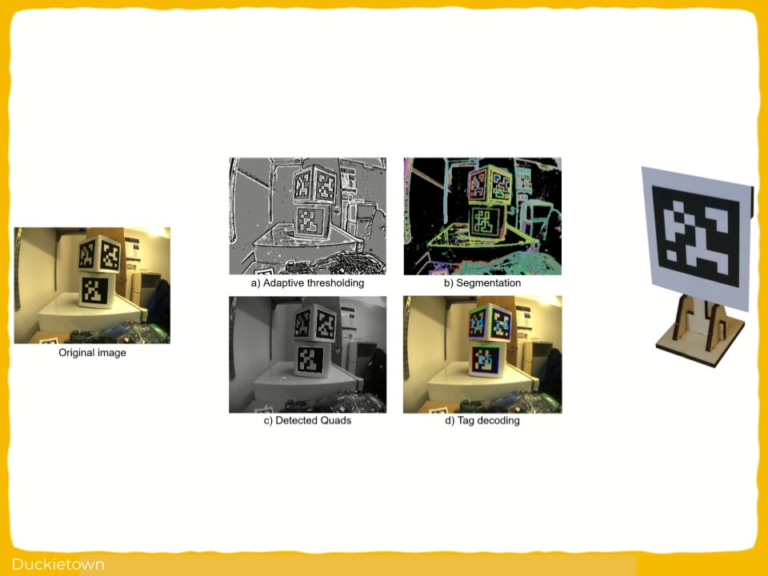
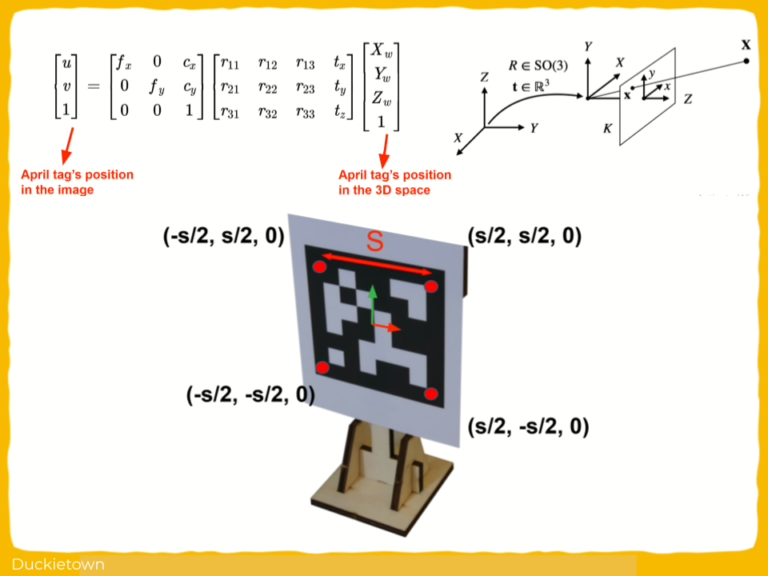
When running by an intersection, stop lines are detected using HSV color segmentation. AprilTag detection determines intersection decisions, with tag IDs mapped to turn directions.
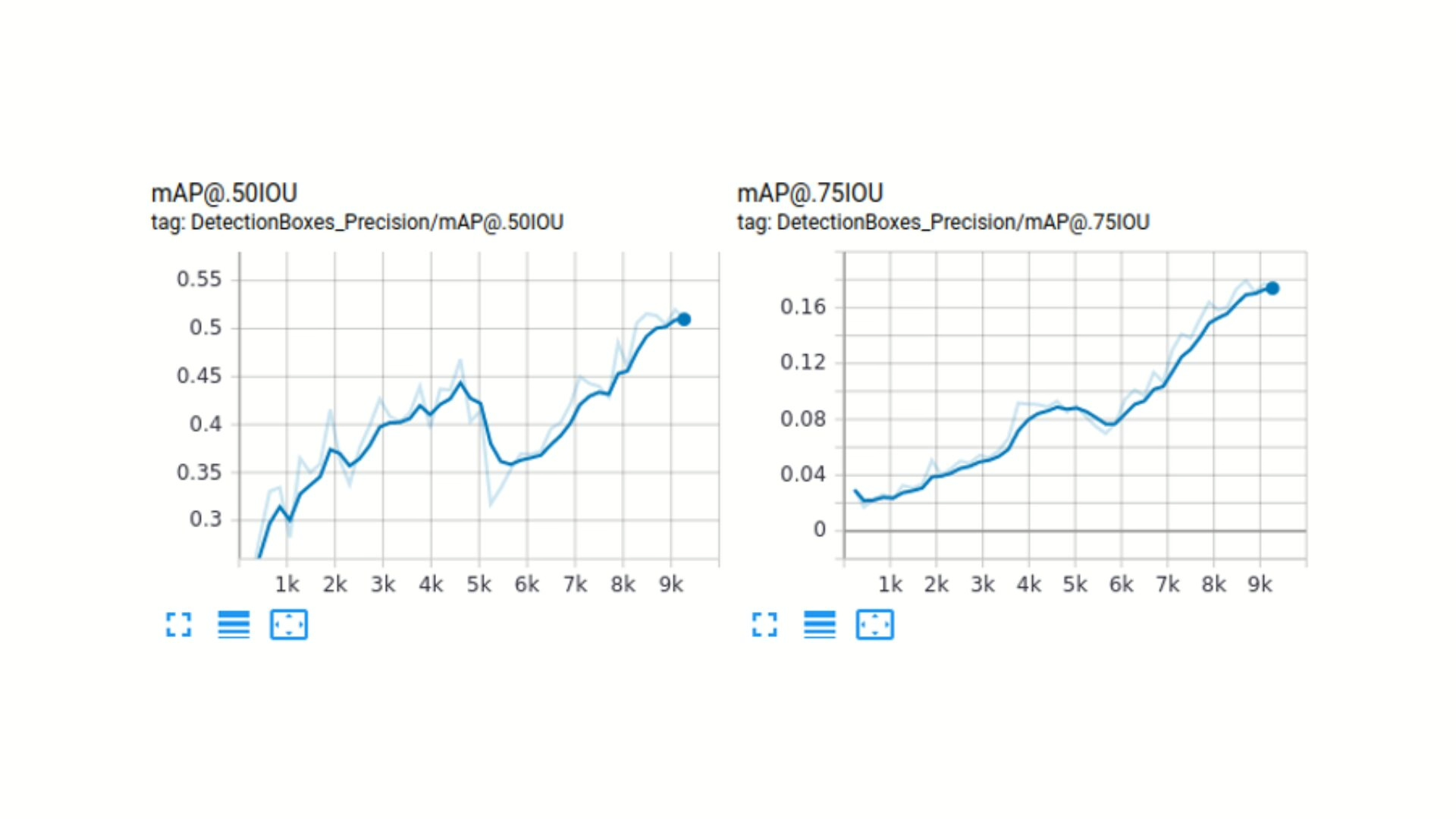
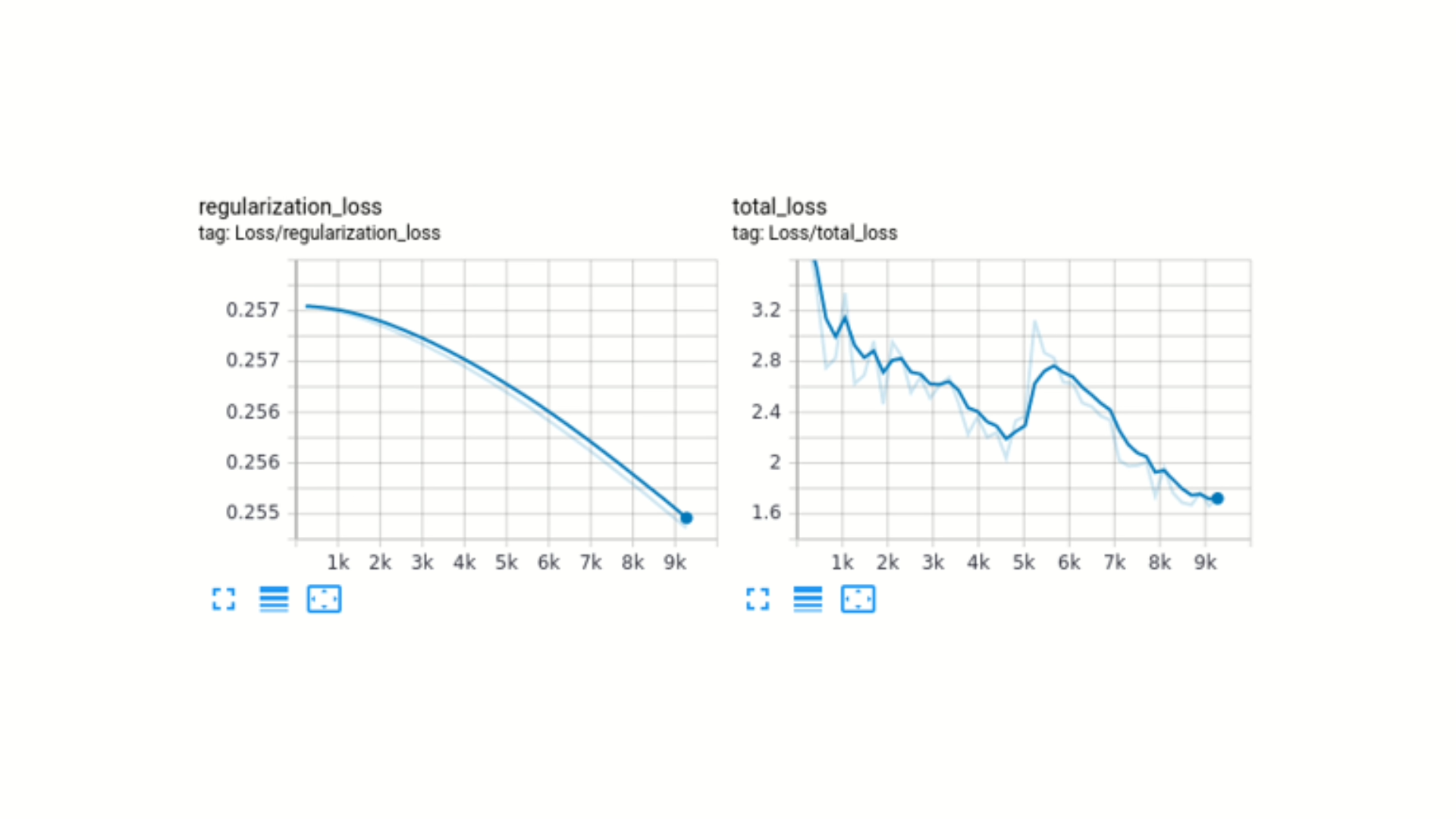
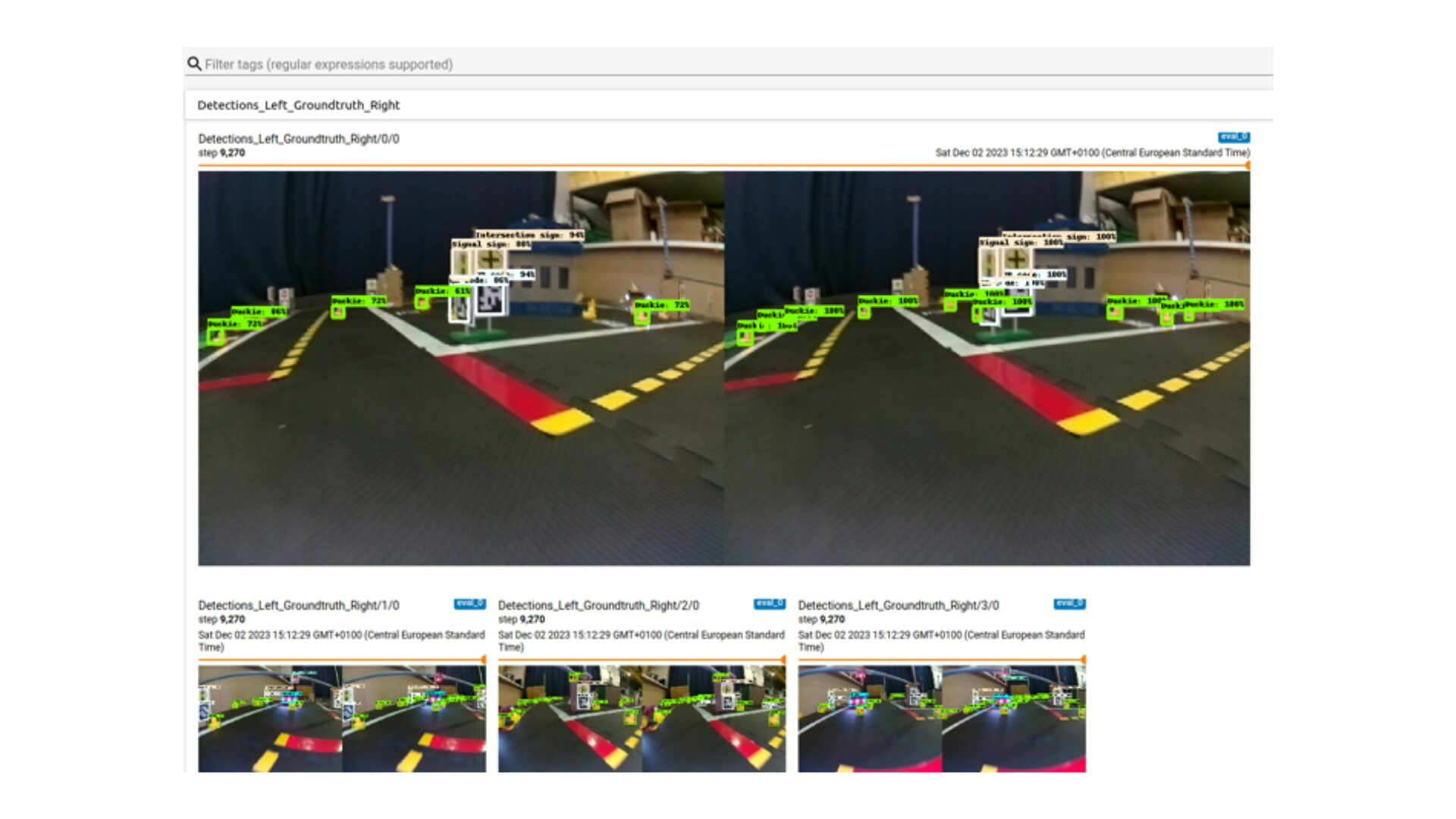
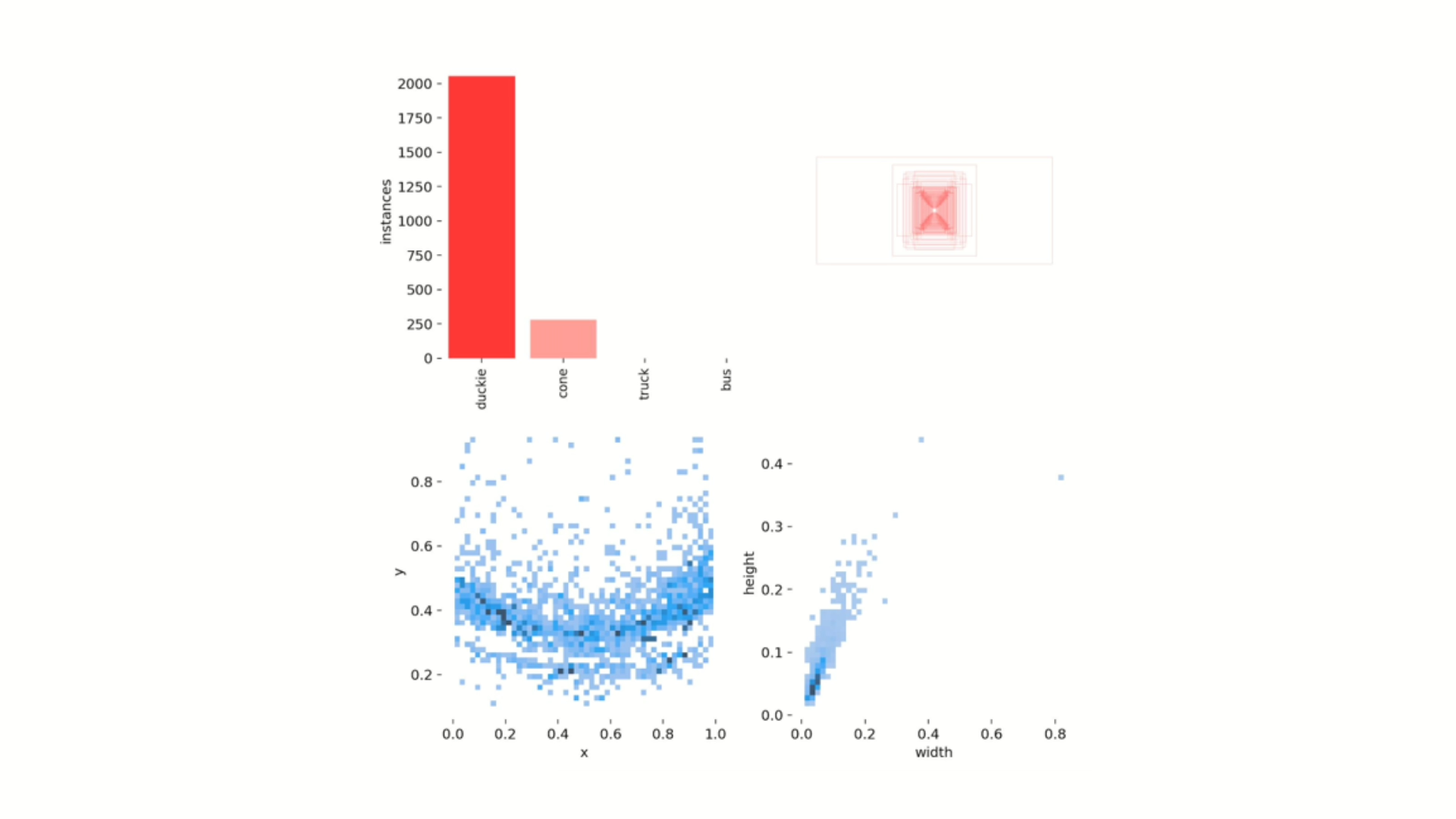
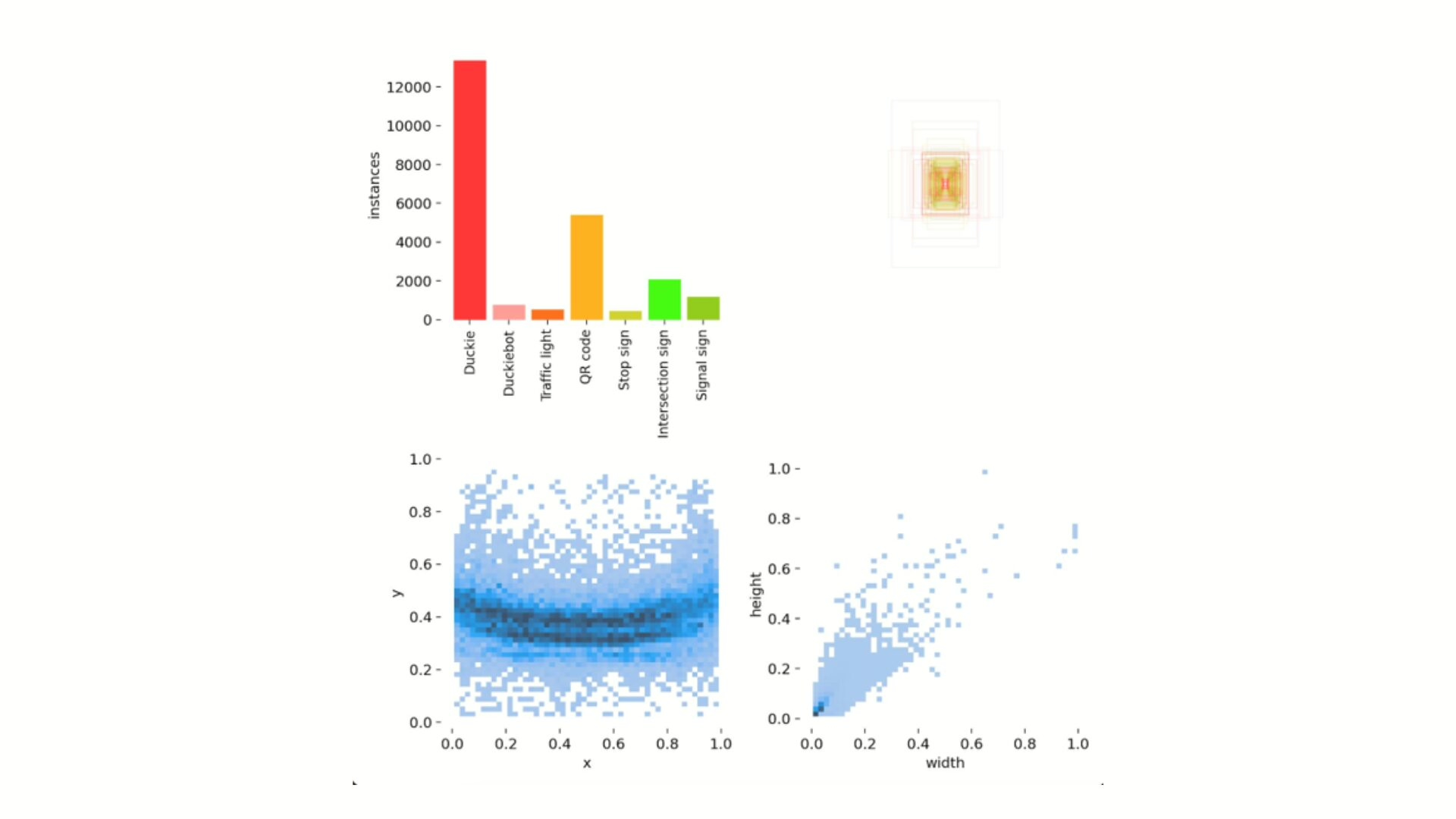
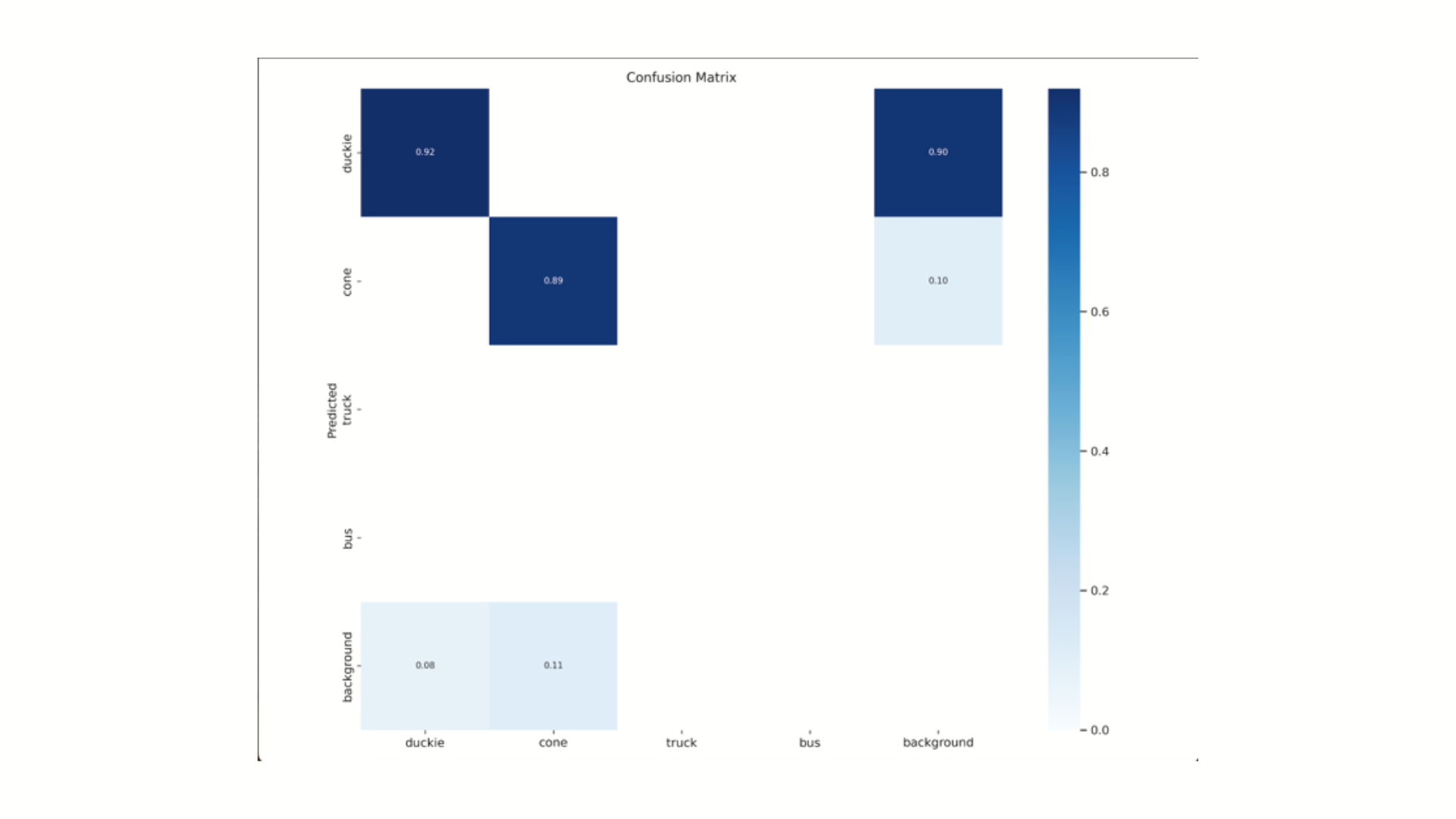
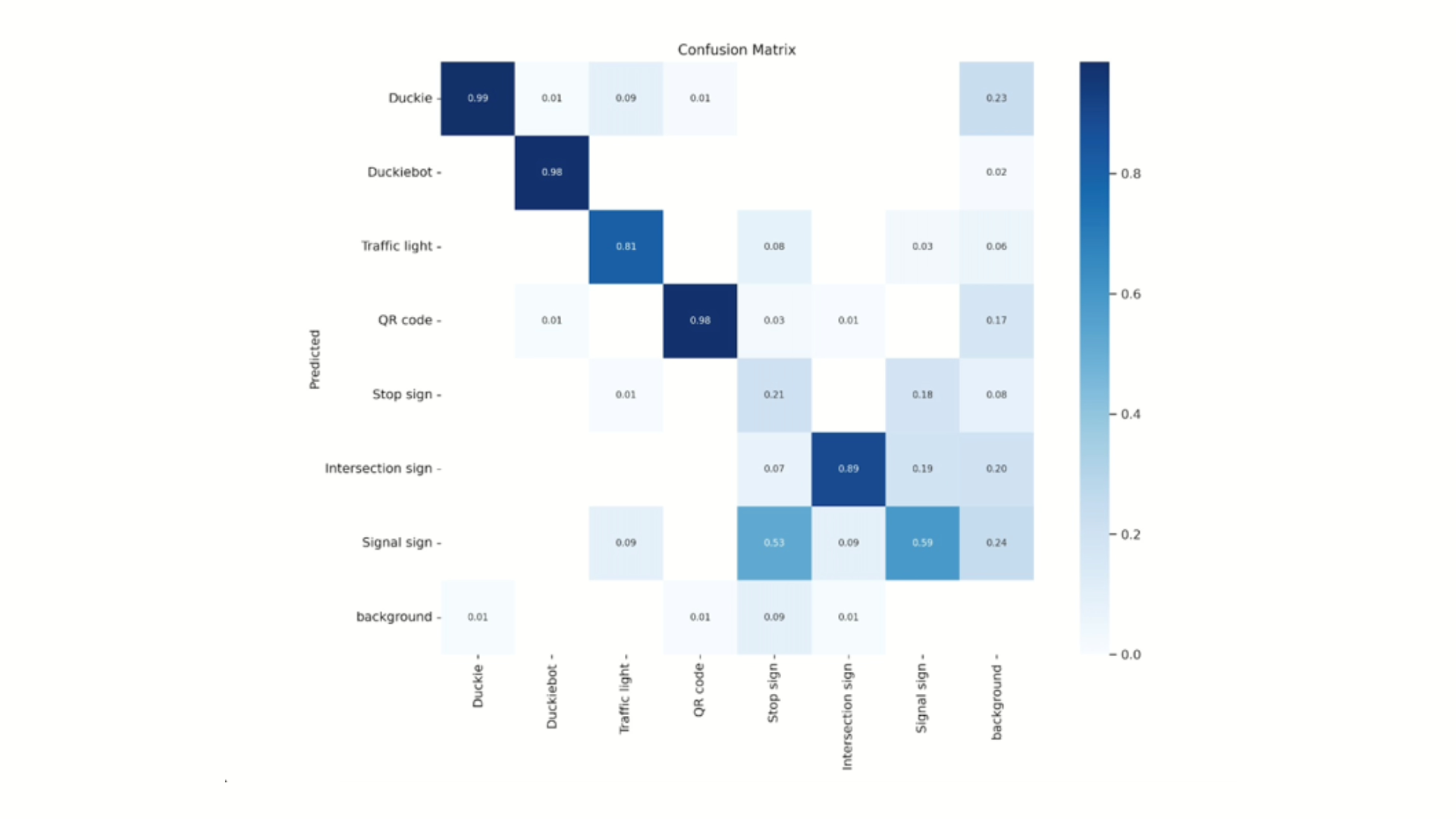
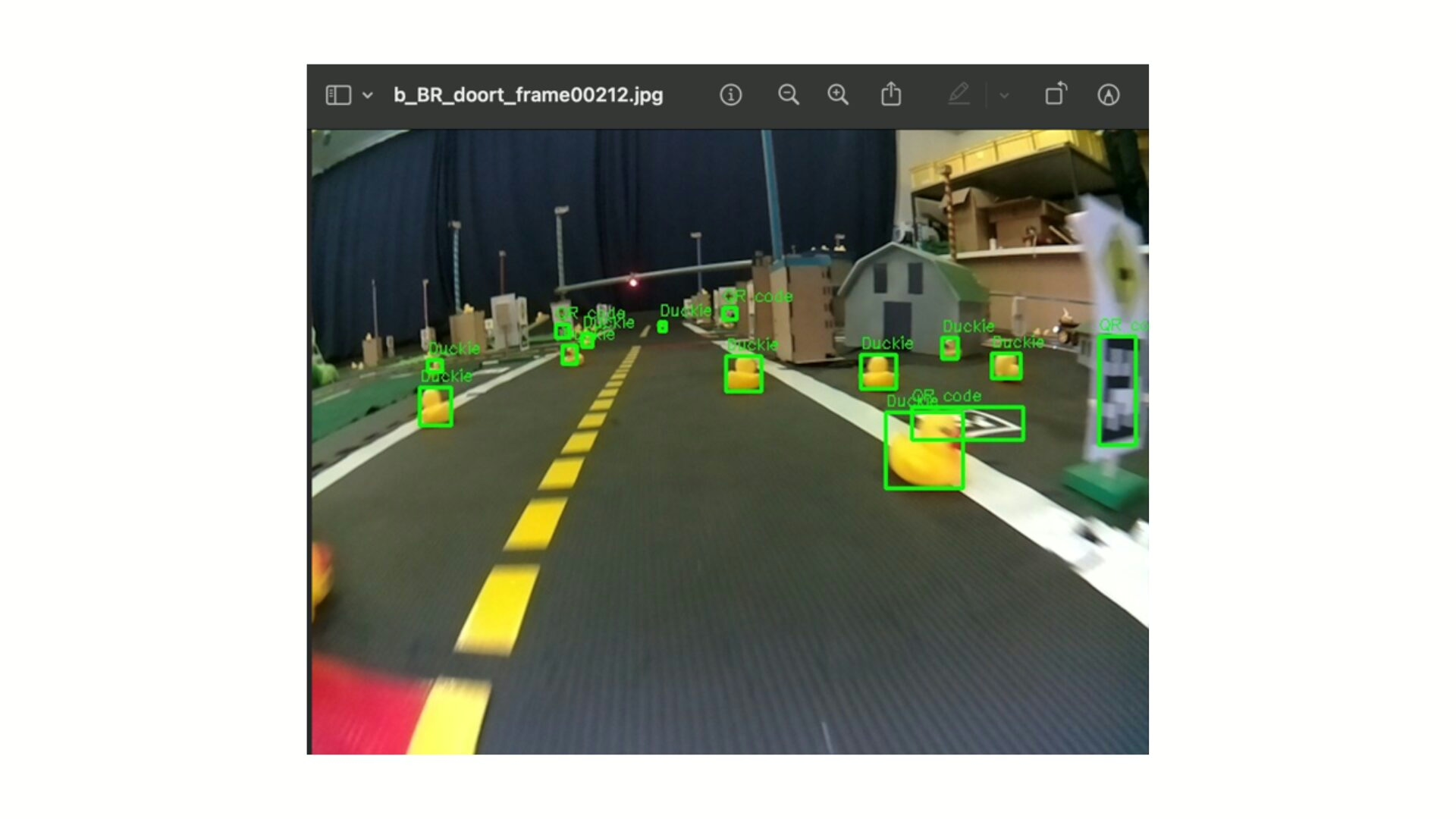
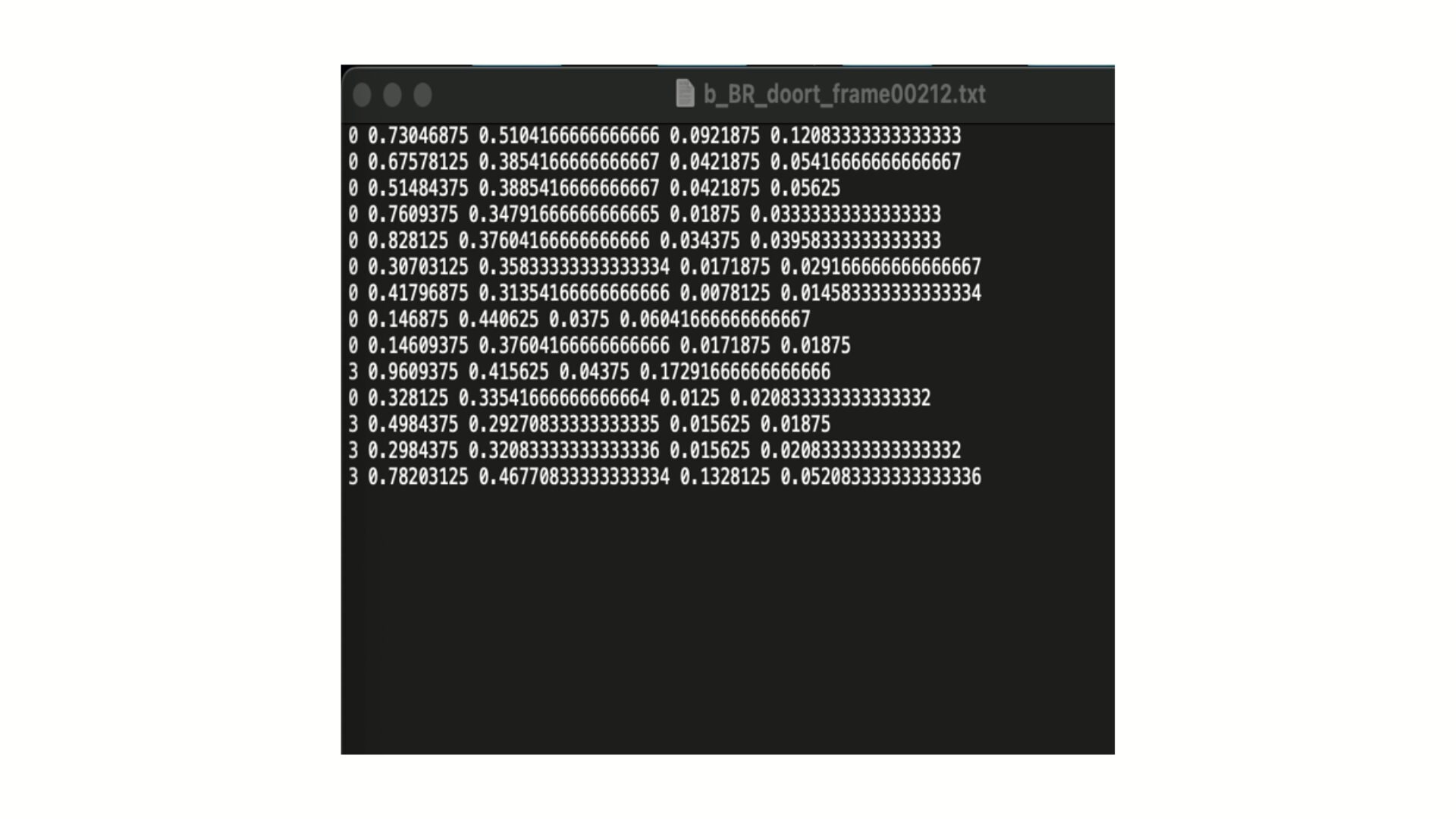
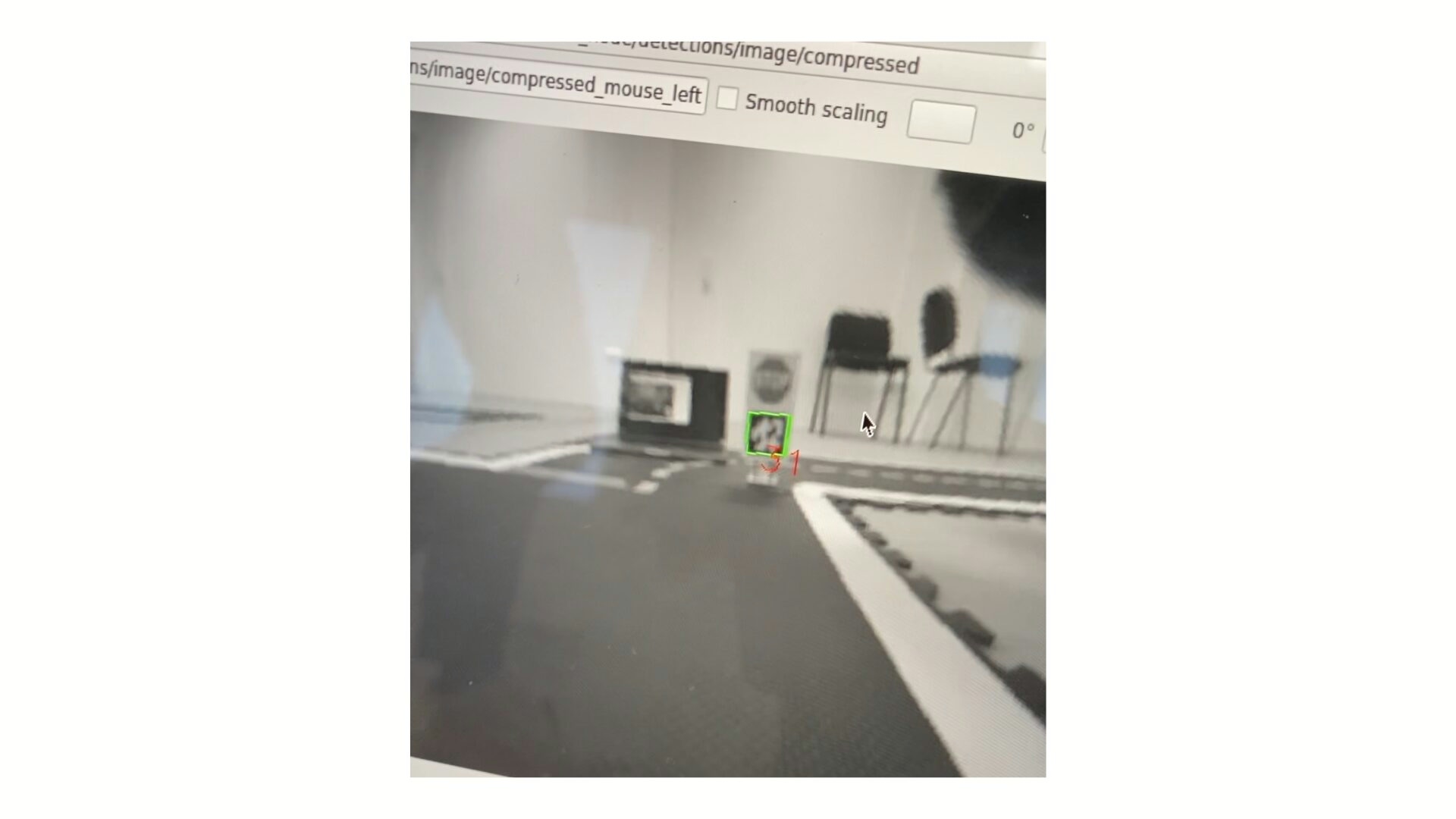
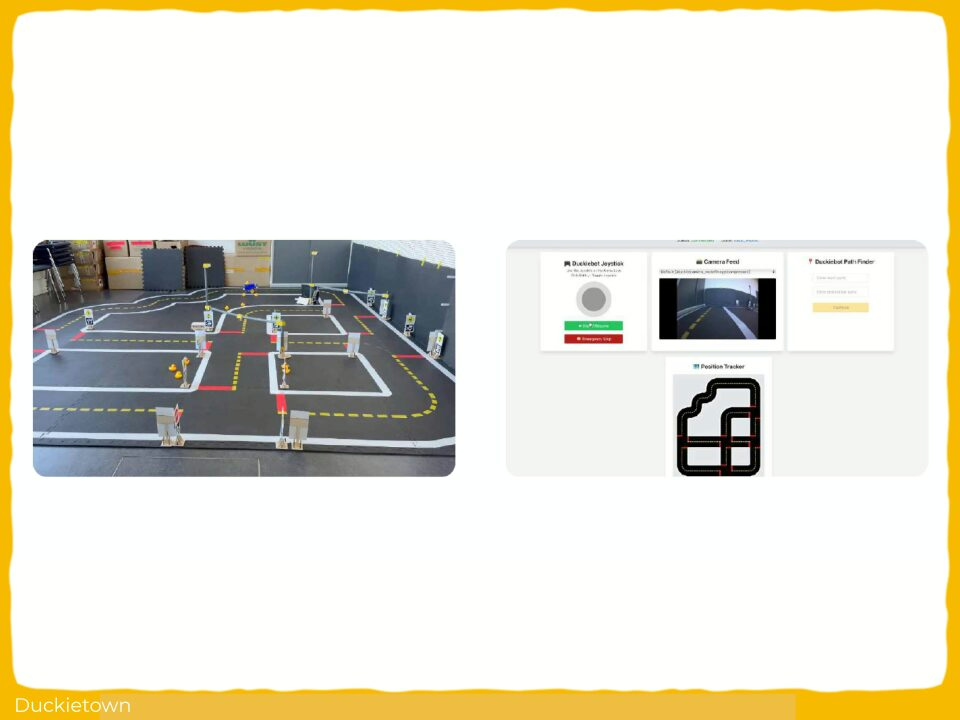
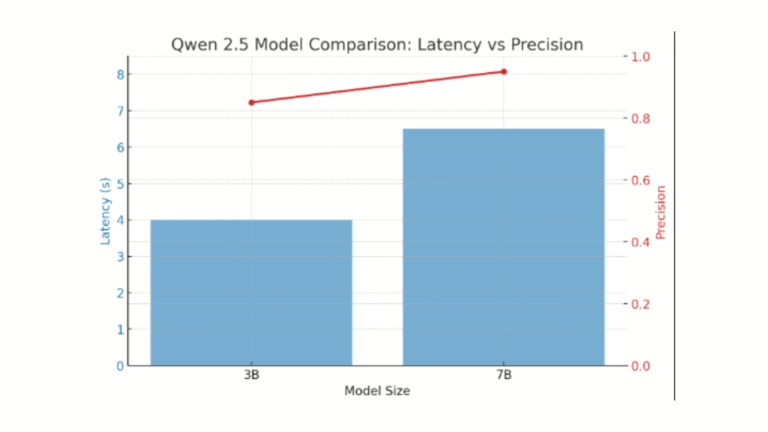
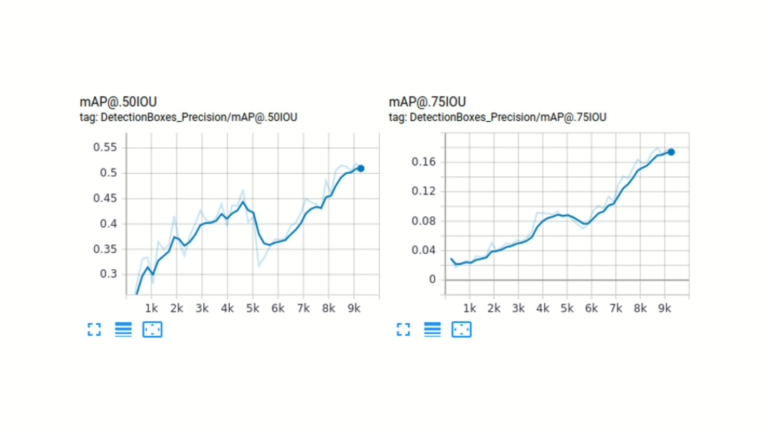
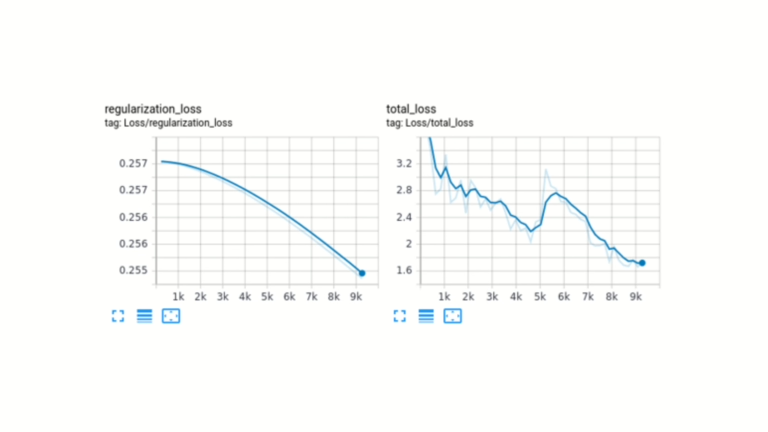
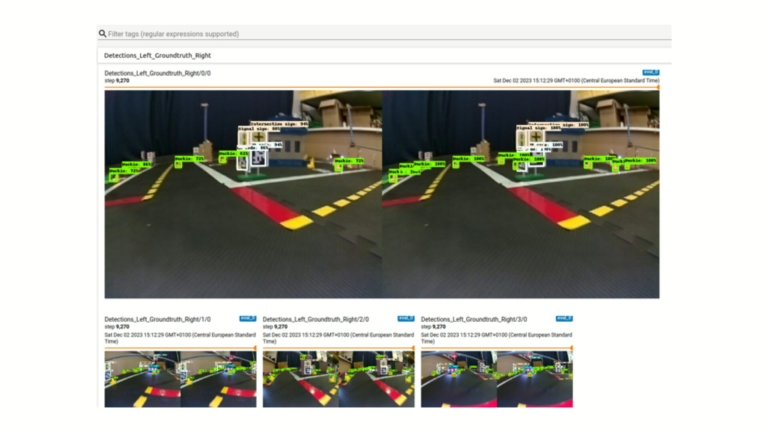
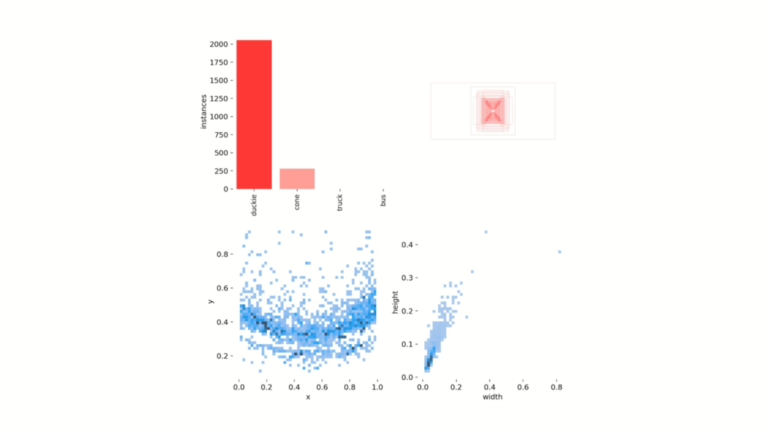
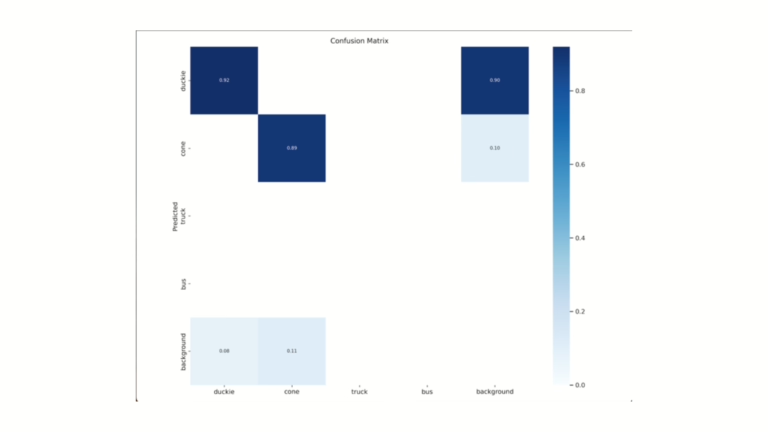
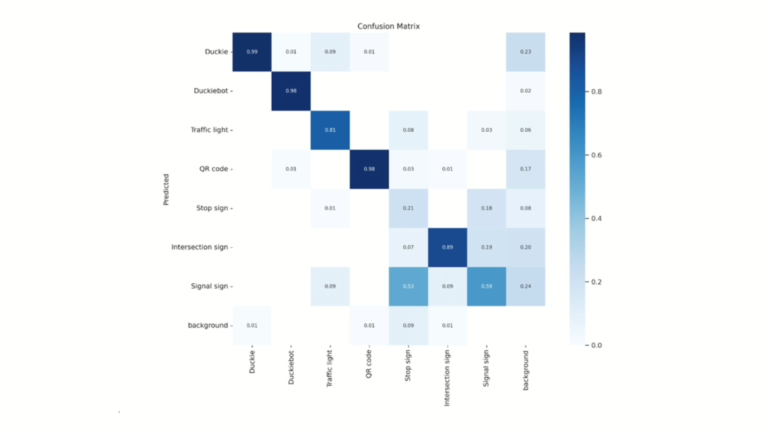
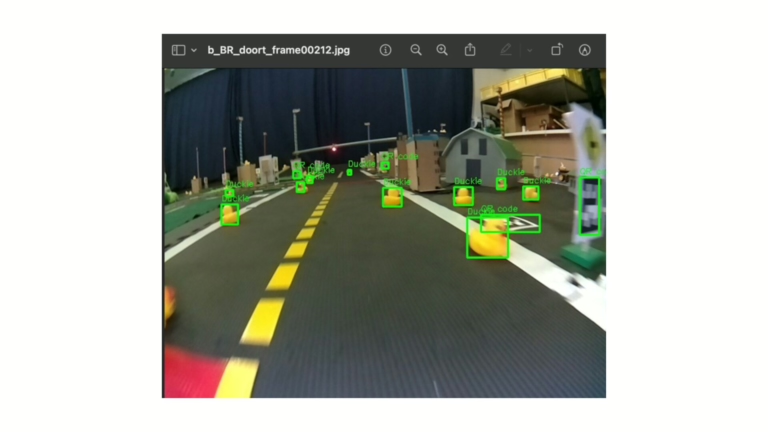
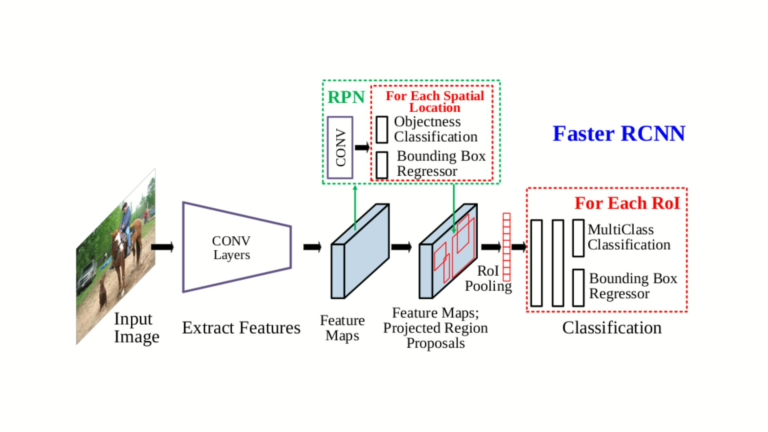
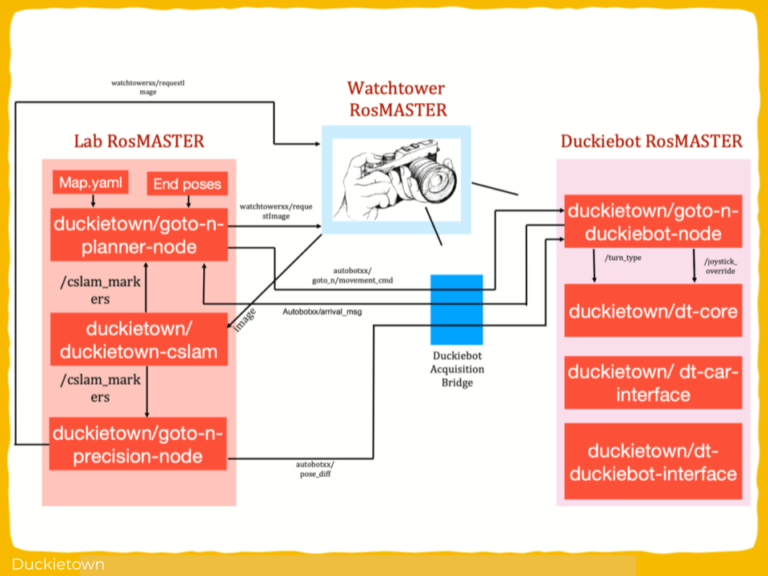
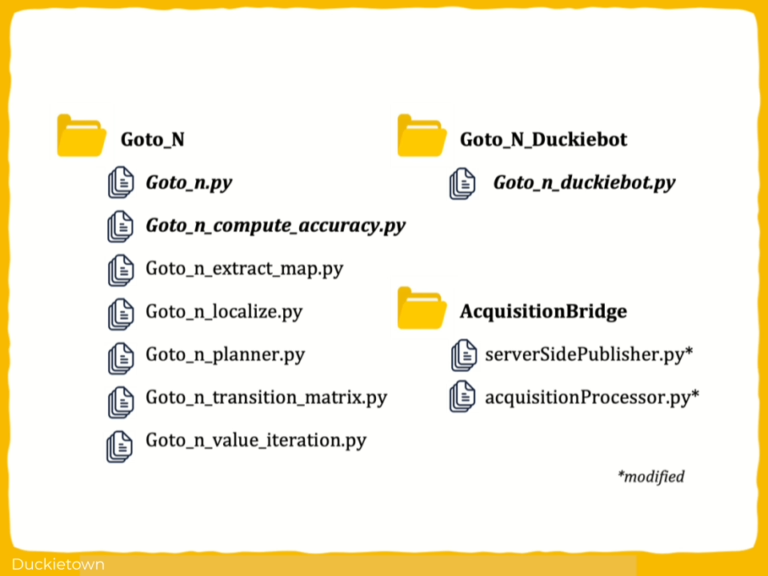
Every module is implemented as an independent ROS package with dedicated launch files, coordinated via a central launch file. A YOLOv3 object detection model, trained on a custom Duckietown dataset, provides real-time obstacle recognition.