
-

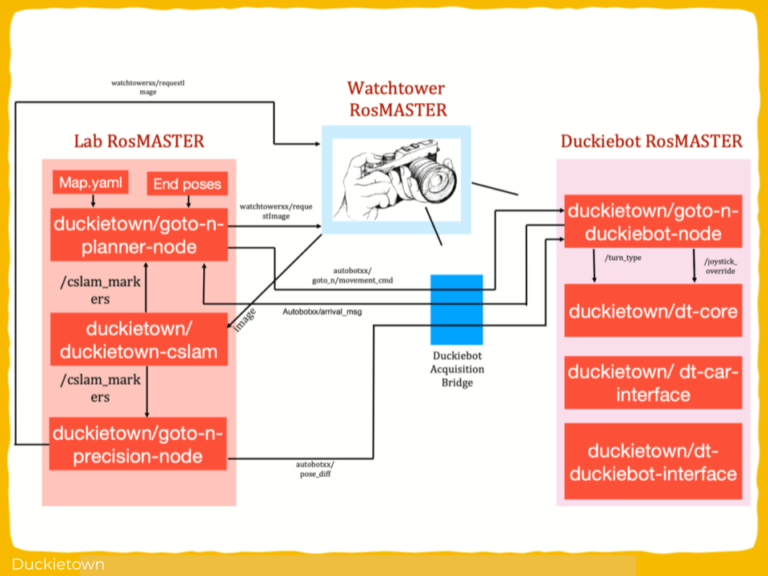
- Figure 1. Nodegraph of the Goto-N Pipeline

-
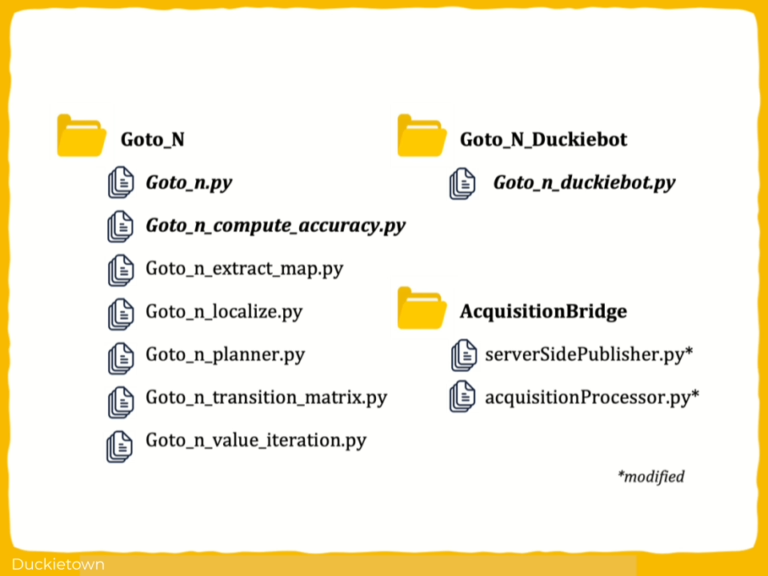
- Figure 2. Overview of Python Files

-
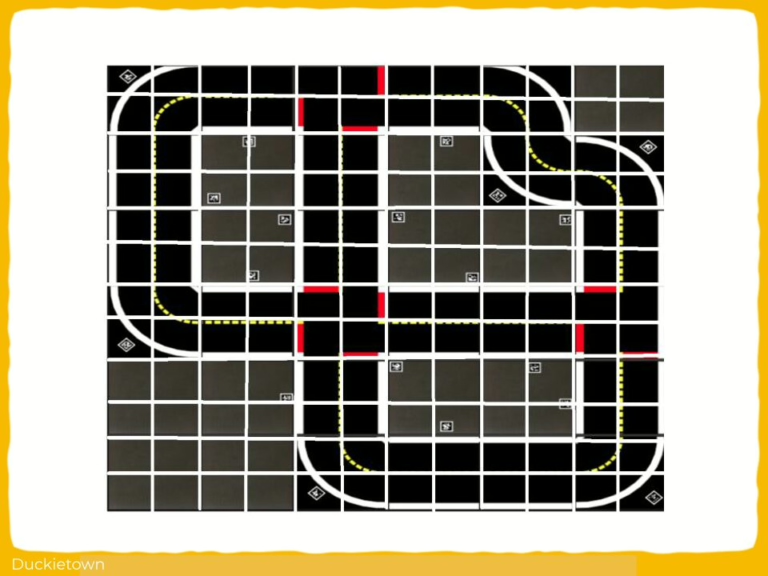
- Figure 3. Map Divided into 14 Tile Nodes

-
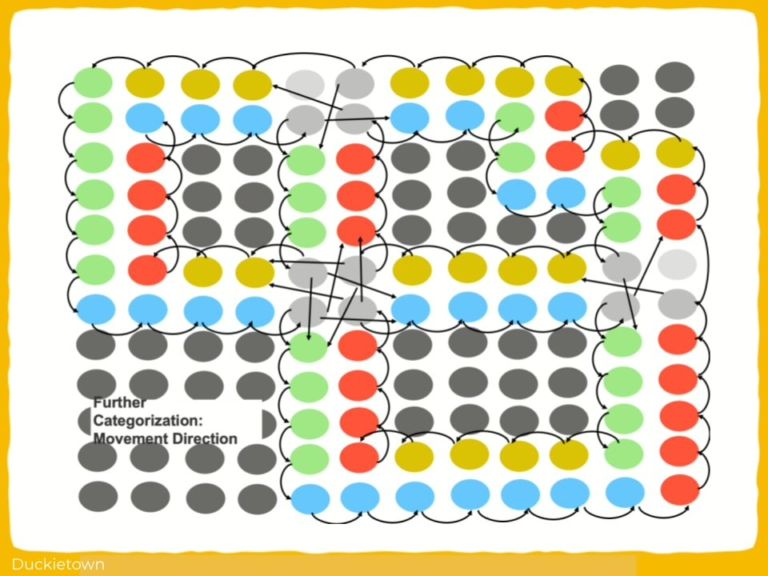
- Figure 4. Allowable Moves from Nodes in Autolab

-
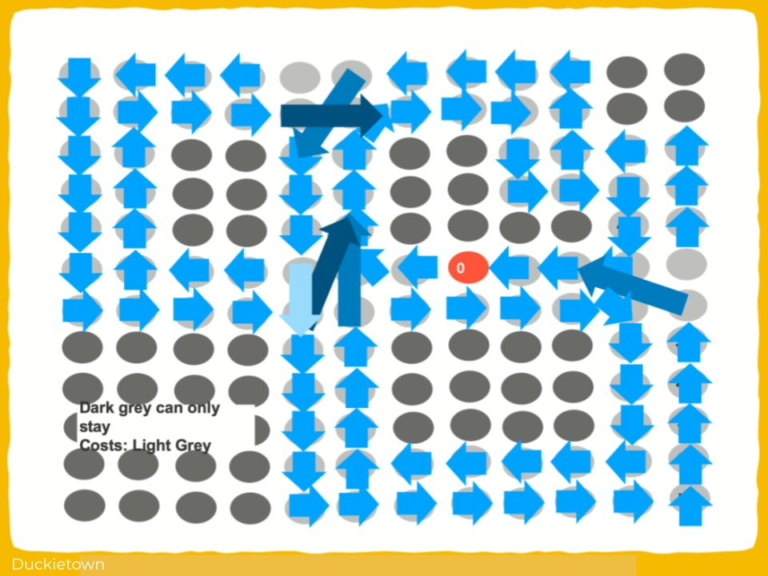
- Figure 5. Optimal Moves by Termination Position

-
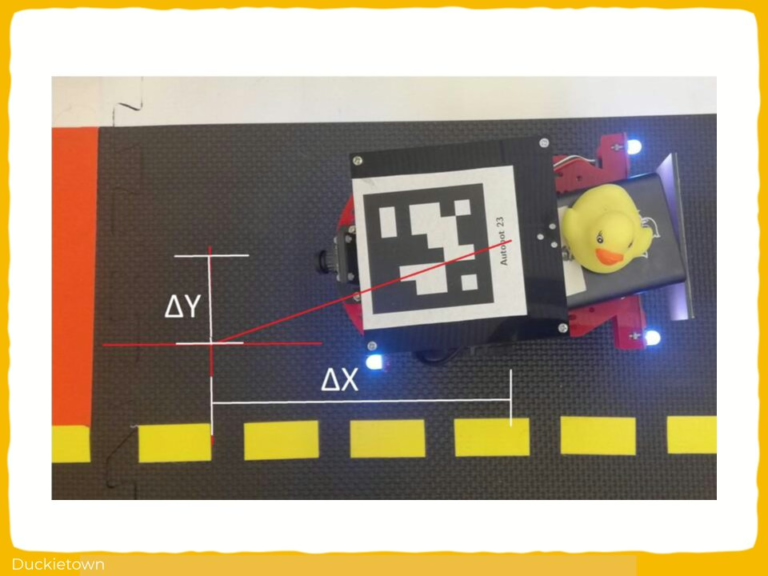
- Figure 6. Final Precision Difference on Autobot

-
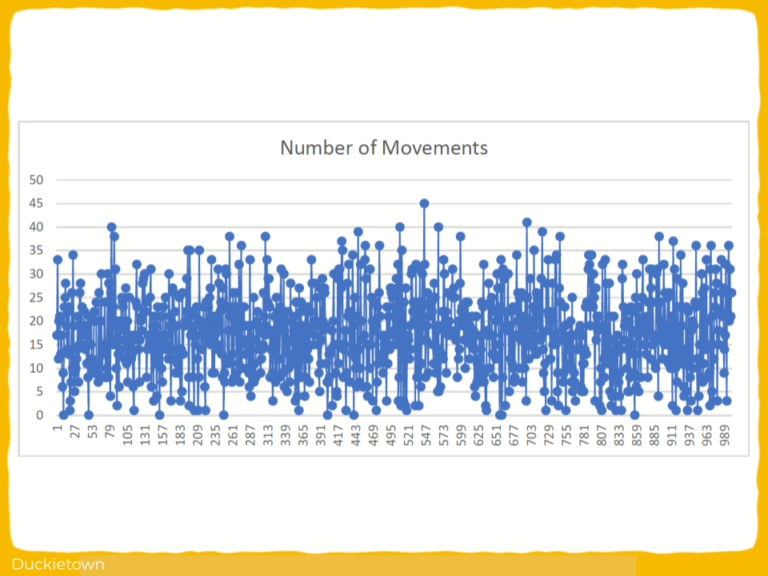
- Figure 7. Movements per Trial with Random Start and End

-
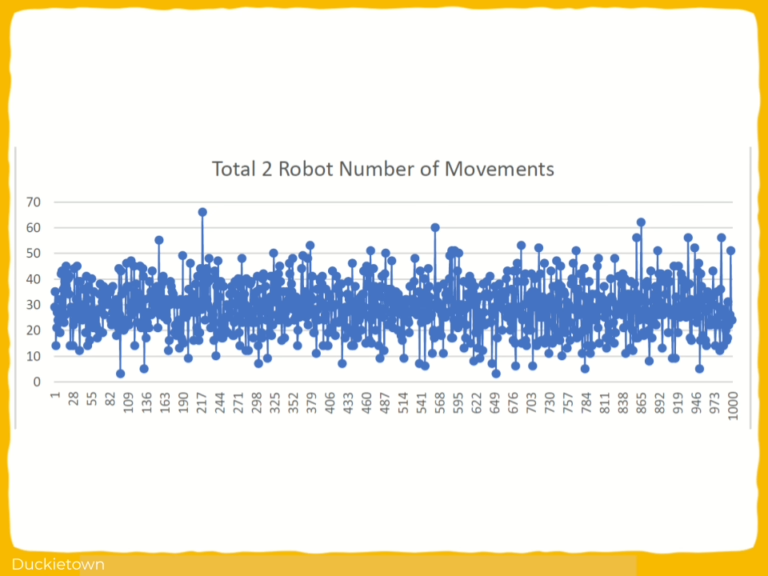
- Figure 8. Total Movements with Two Robots

-
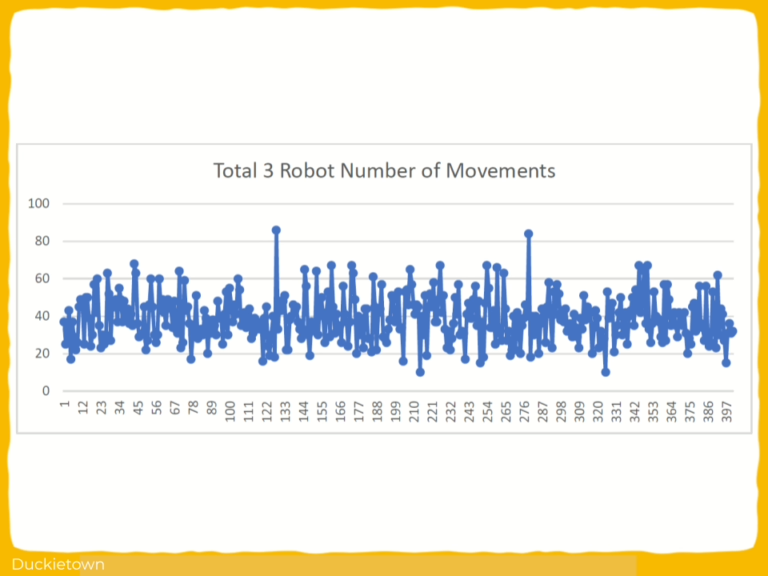
- Figure 9. Total Movements with Three Robots

-
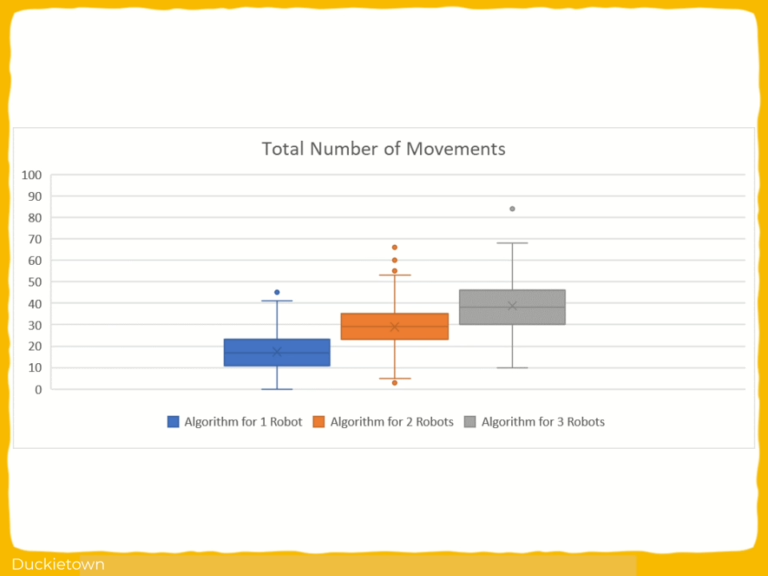
- Figure 10. Avg. Total Movements vs. Bots Used

-
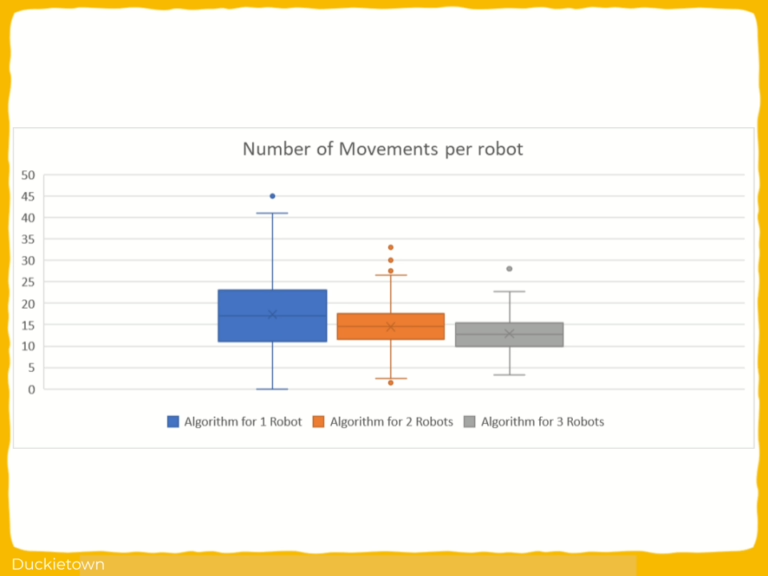
- Figure 11. Movements per Bot vs. Bots Used

-
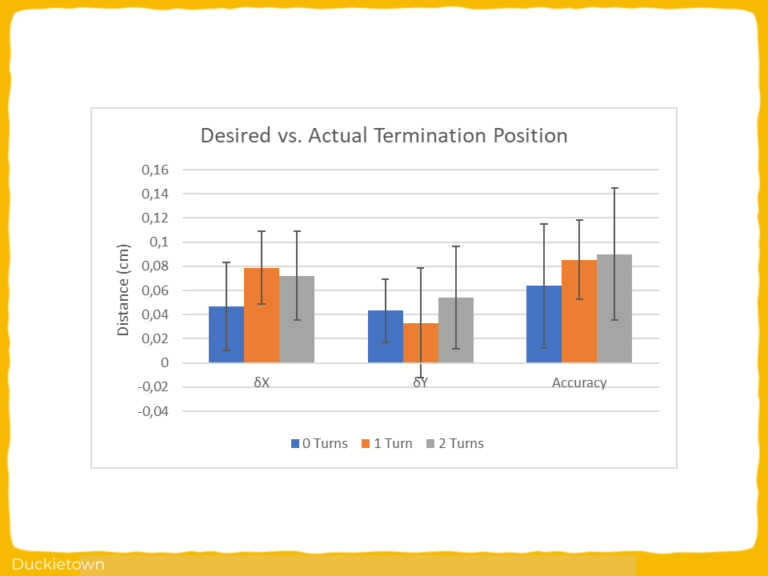
- Figure 12. Desired vs. Actual Termination Positions






