
-

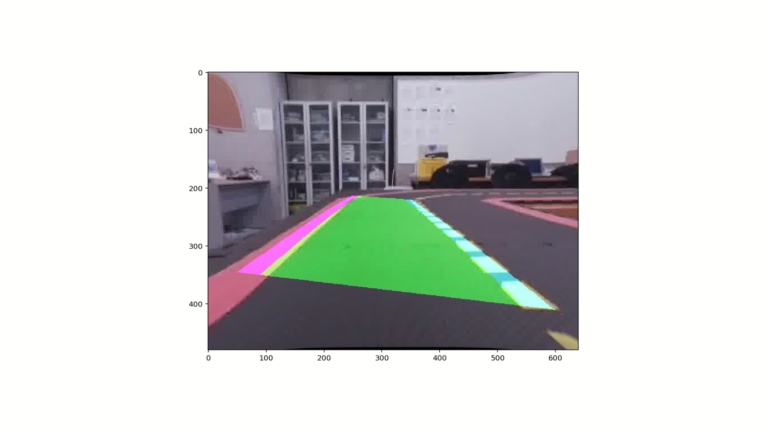
- Real-Time Lane Overlay

-
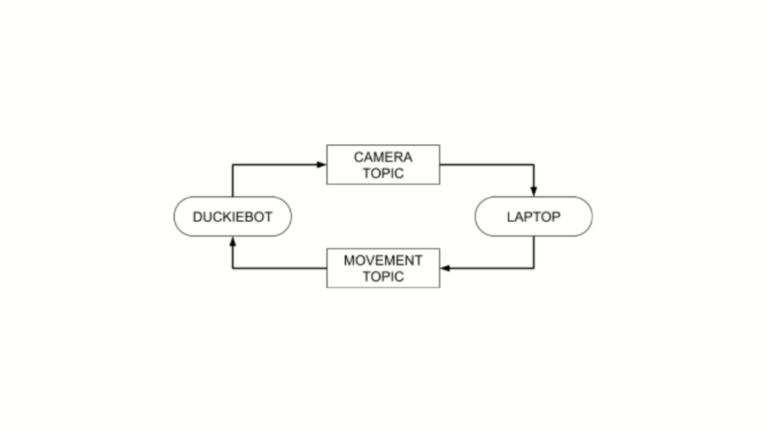
- ROS Node Communication

-
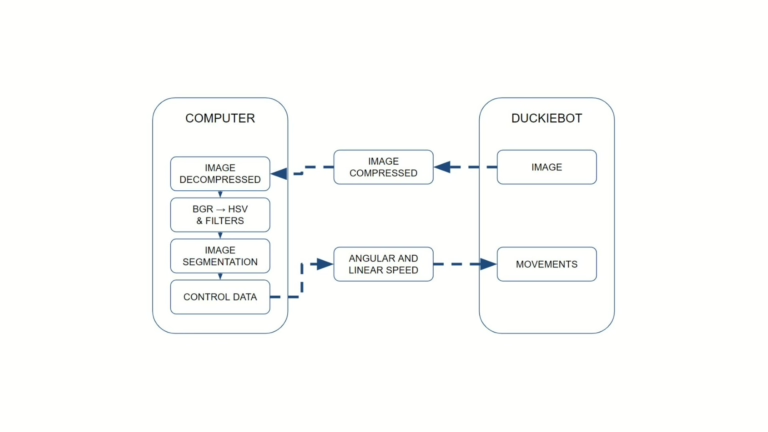
- System Workflow Overview

-
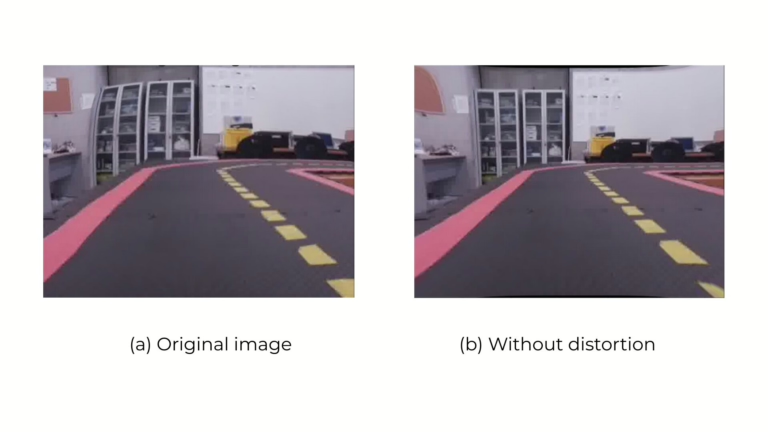
- Image Distortion Correction

-
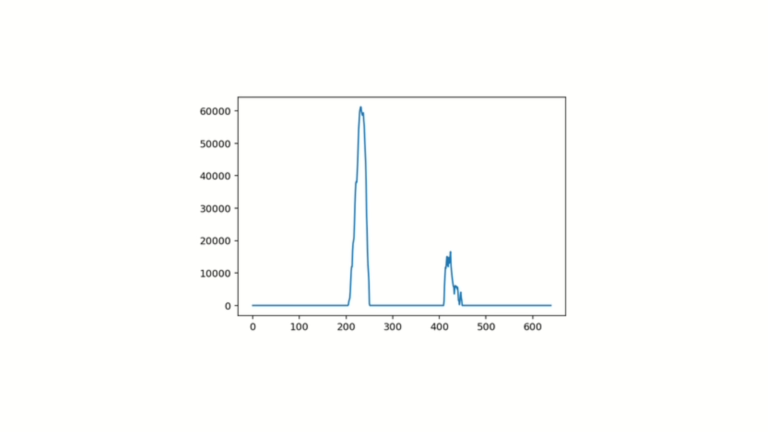
- Lane Histogram Segmentation

-
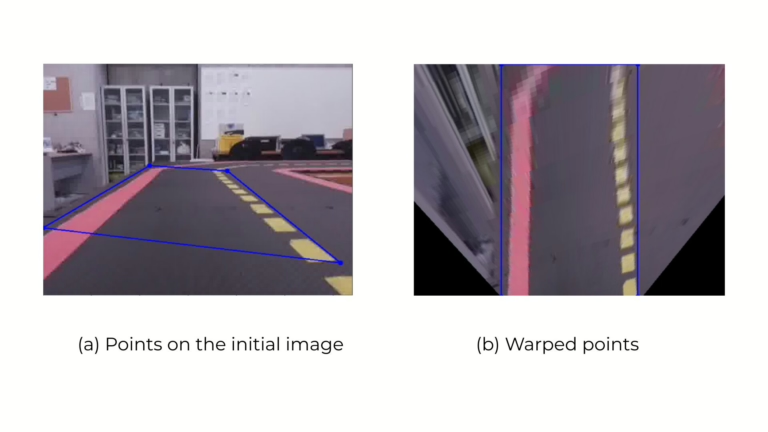
- Perspective Warping Process

-
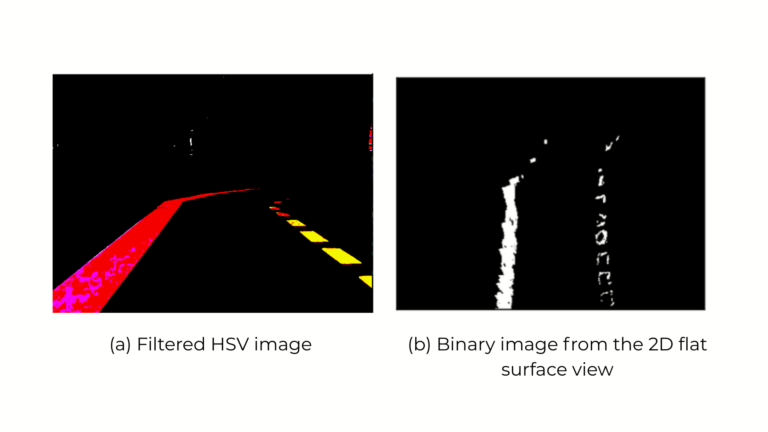
- HSV and Edge Detection

-
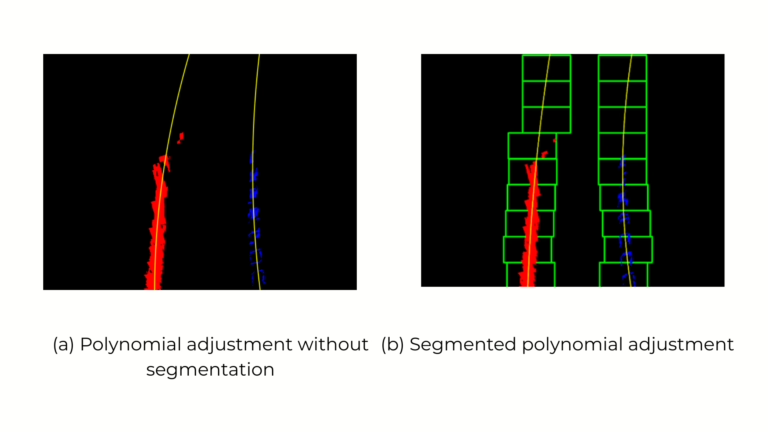
- Polynomial Adjustment Techniques

-
- Duckiebot used at UTEC












