One of the classical objections made to machine learning approaches to embeddded autonomy (i.e., to create agents that are deployed on real, physical, robots) is that training requires data, data requires experiement, and experiment are “expensive” (time, money, etc.).
The natural counter argument to this is to use simulation to create the training data, because simulations are much less expensive than real world experiment; they can be ran continuously, with accellerated time, don’t require supervision, nobody gets tired, etc.
But, as the experienced roboticist knows, “simulations are doomed to succeed”. This phrase encapsulates the notion that simulations do not contain the same wealth if information as the real world, because they are programmed to be what the programmer wants them to be useful for – they do not capture the complexity of the real world. Eventually things will “work” in simulation, but does that mean they will “work” in the real-world, too?
As Carl Sagan once said: “If you wish to make an applie pie from scratch, you must first reinvent the universe”.
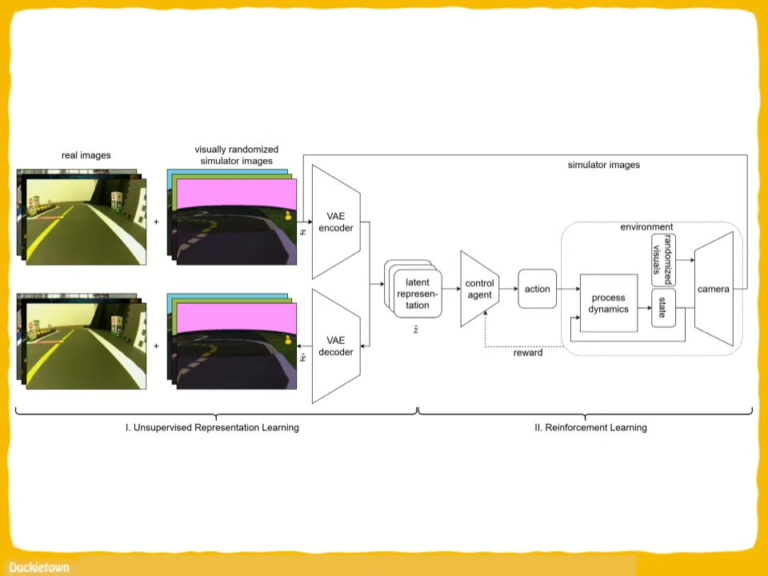
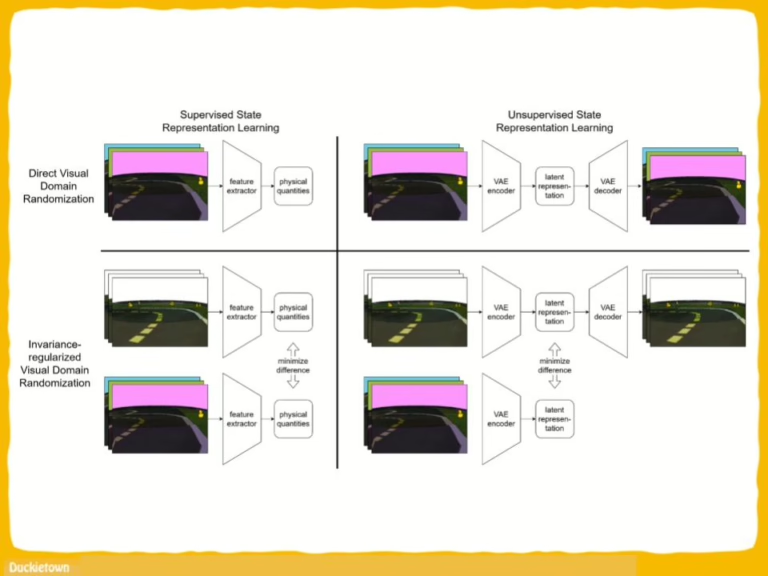
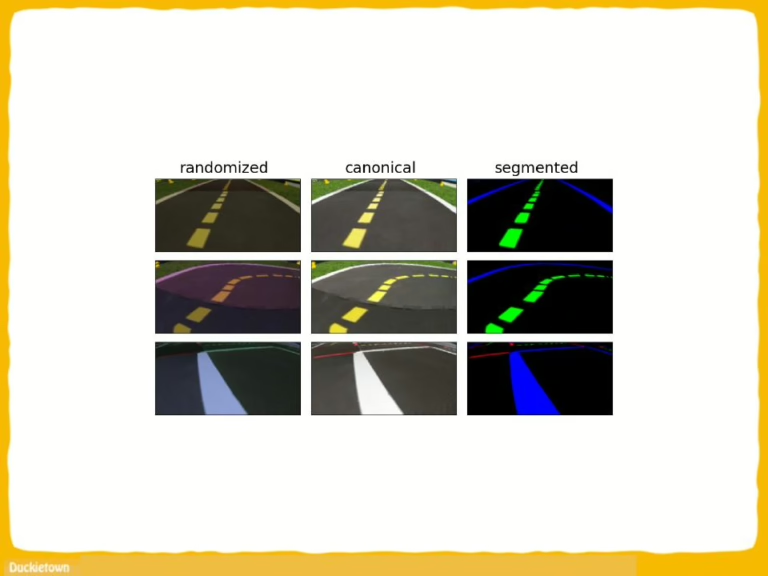
Domain randomization is an approach to mitigate the limitations of simulations. Instead of training an agent on one set of parameters defining the simulation, many simulations are instead ran, with different values of this parameters. E.g., in the context of a driving simulator like Duckietown, one set of parameters could make the sky purple instead of blue, or the lane markings have slightly different geometric properties, etc. The idea behind this approach is that the agent will be trained on a distribution of datasets that are all slightly different, hopefully making the agent more robust to real world nuisances once deployed in a physical body.
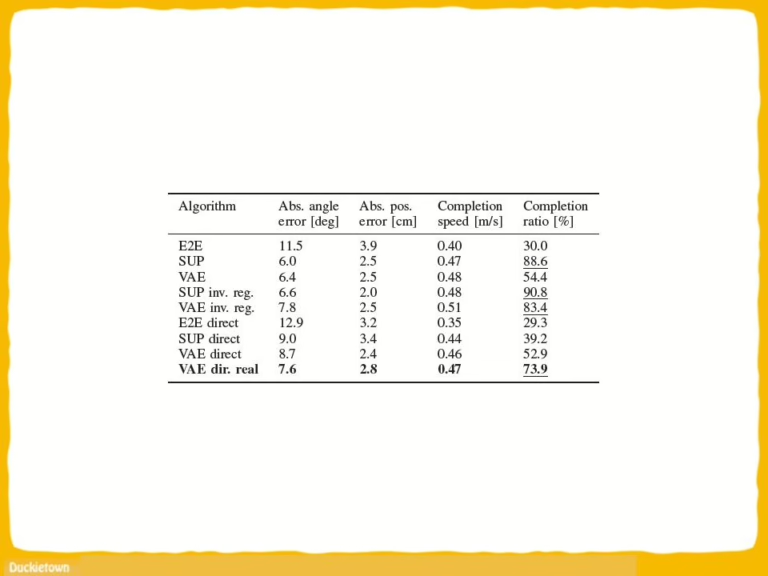
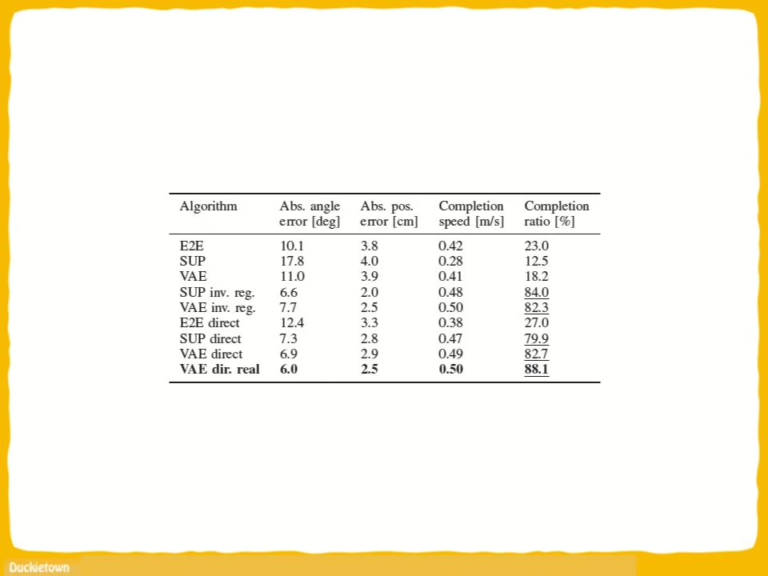
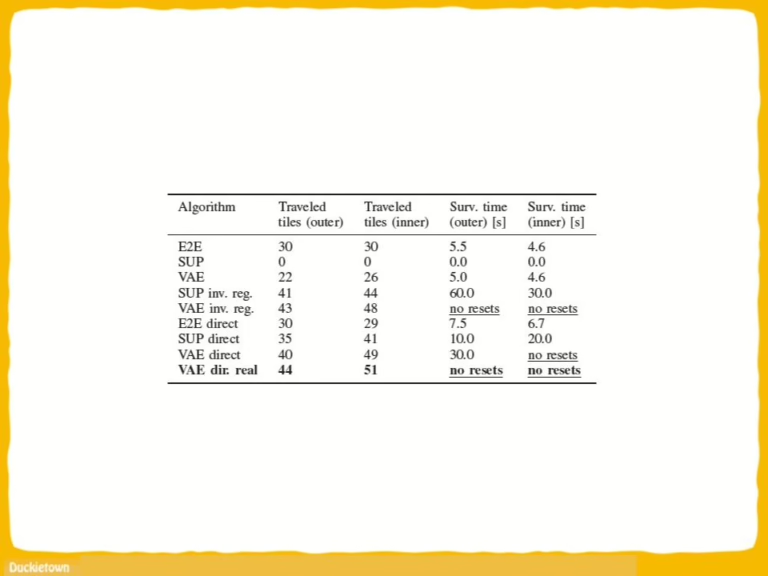
In this paper, the authors investigate specifically visual domain randomization.
Learn about RL, navigation, and other robot autonomy topics at the link below!