
-

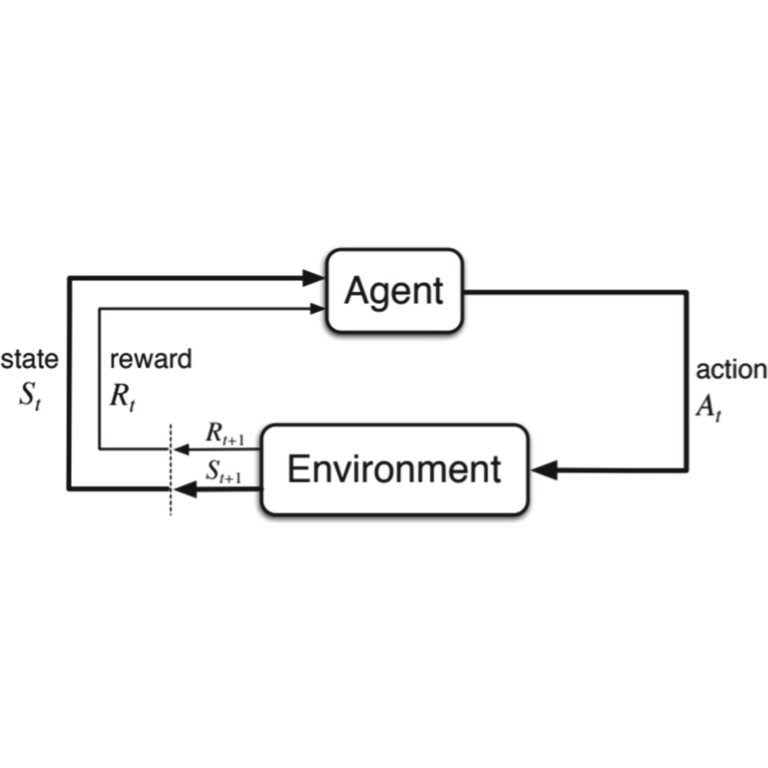
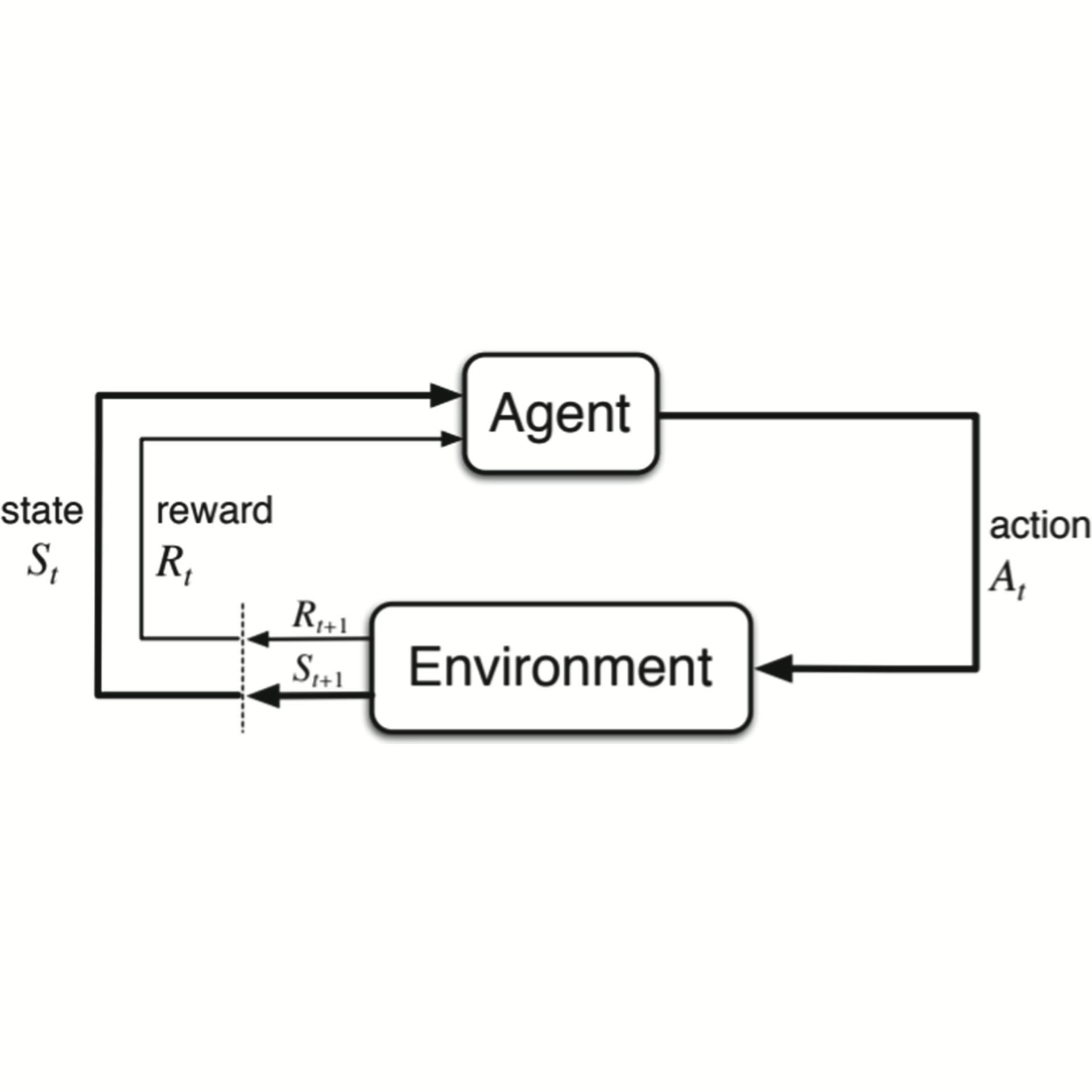
- Figure 1. Agent-Environment Interaction in Reinforcement Learning.
-
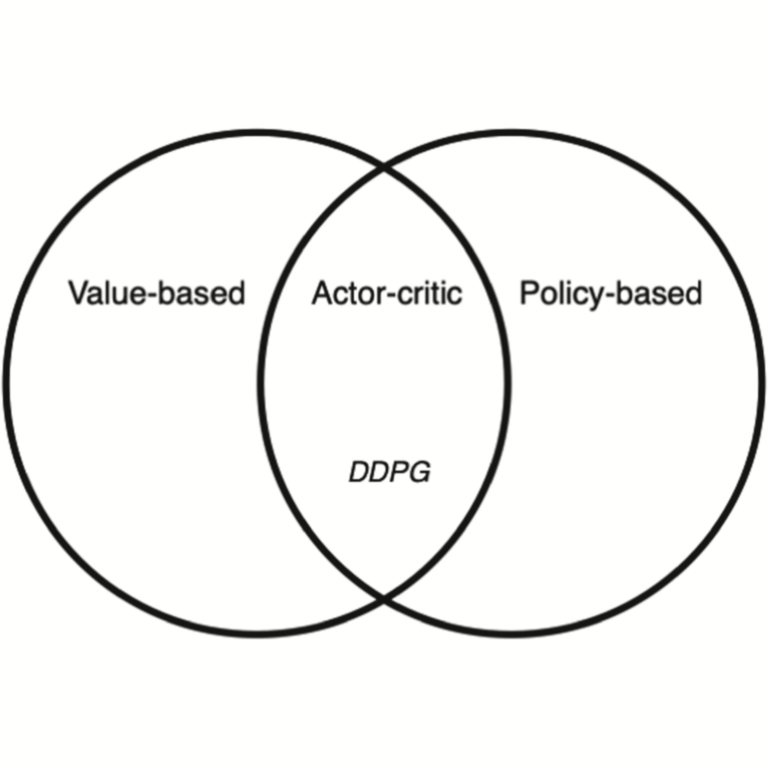
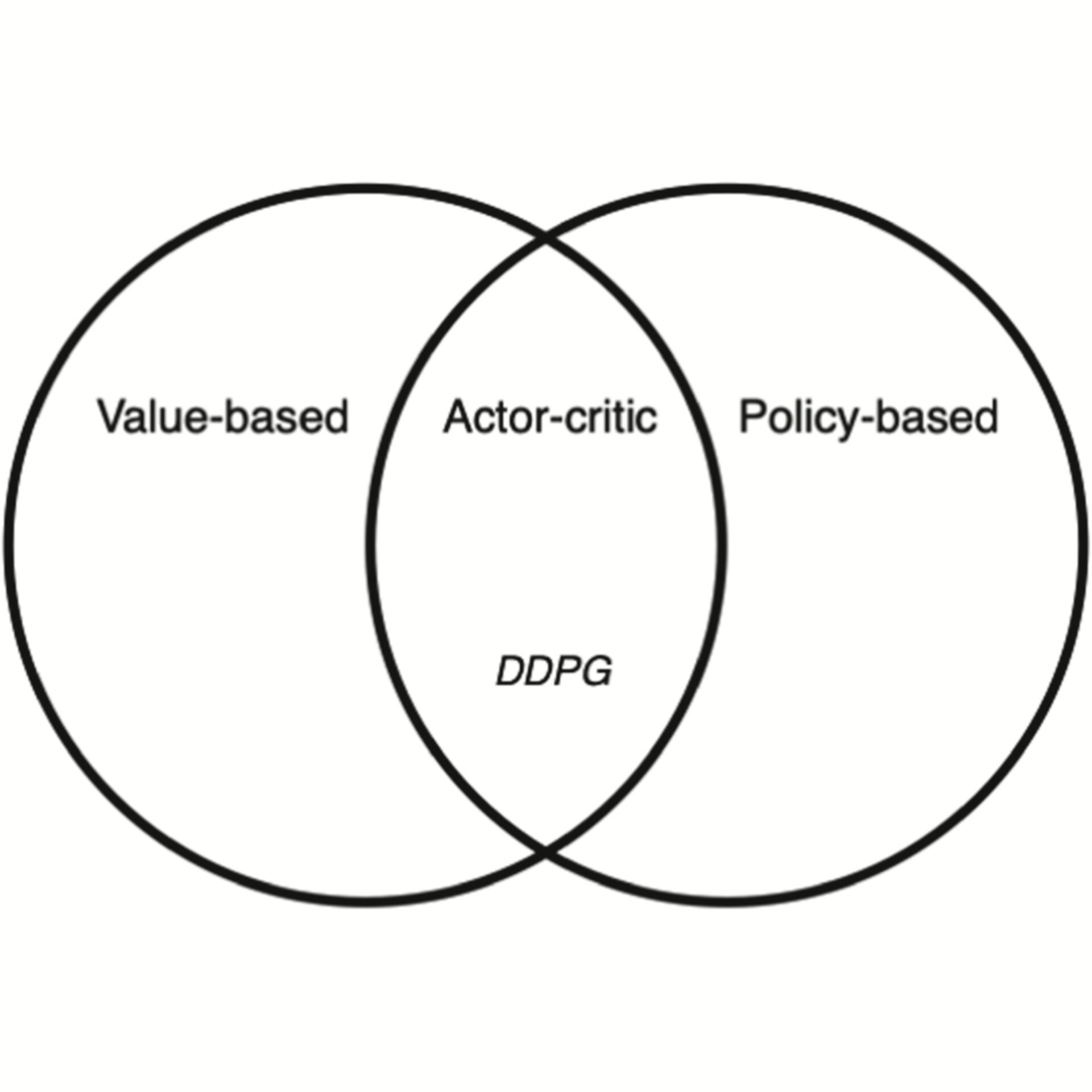
- Figure 2. Classification of RL Algorithms.
-
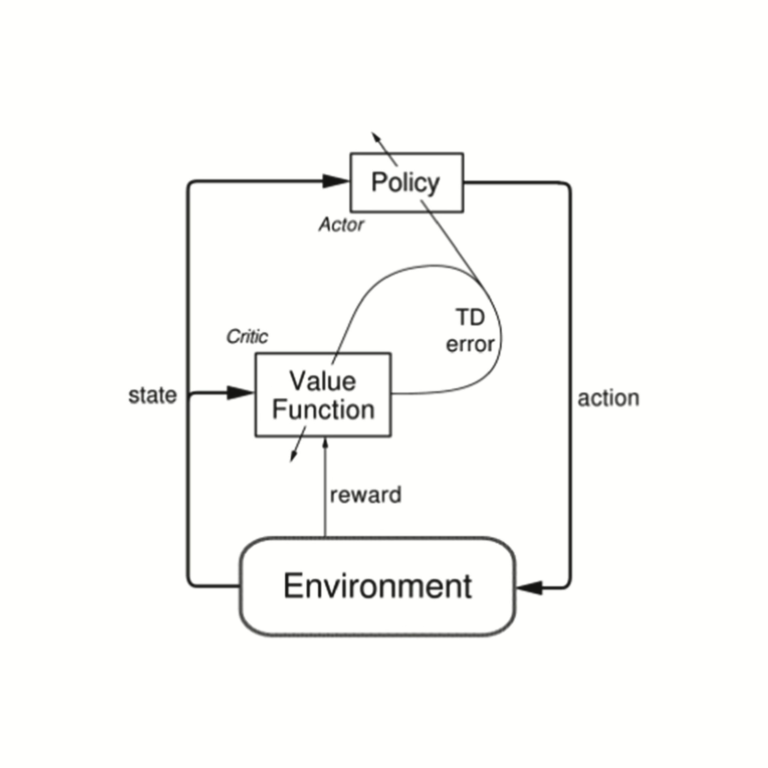
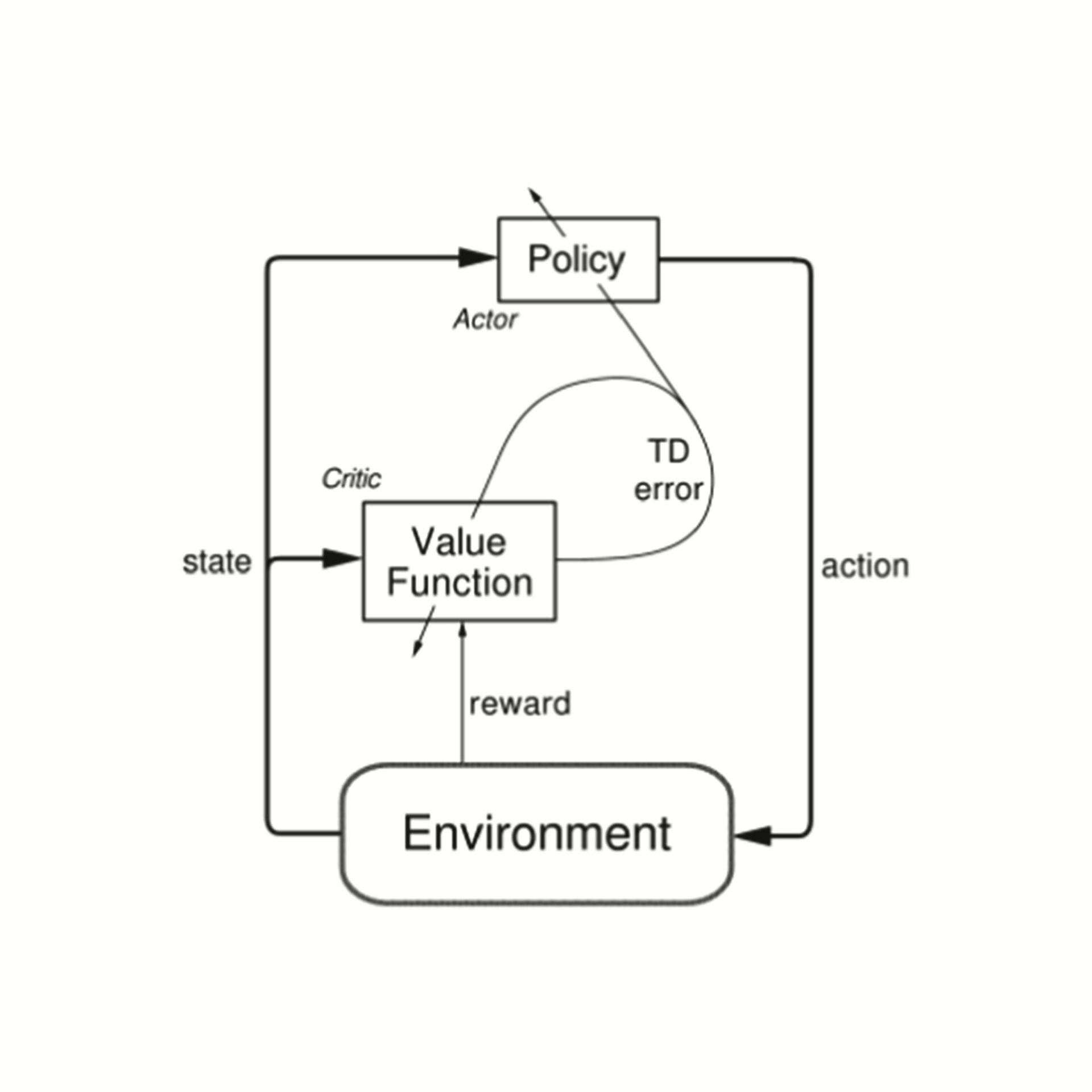
- Figure 3. Actor-Critic Method Architecture.
-
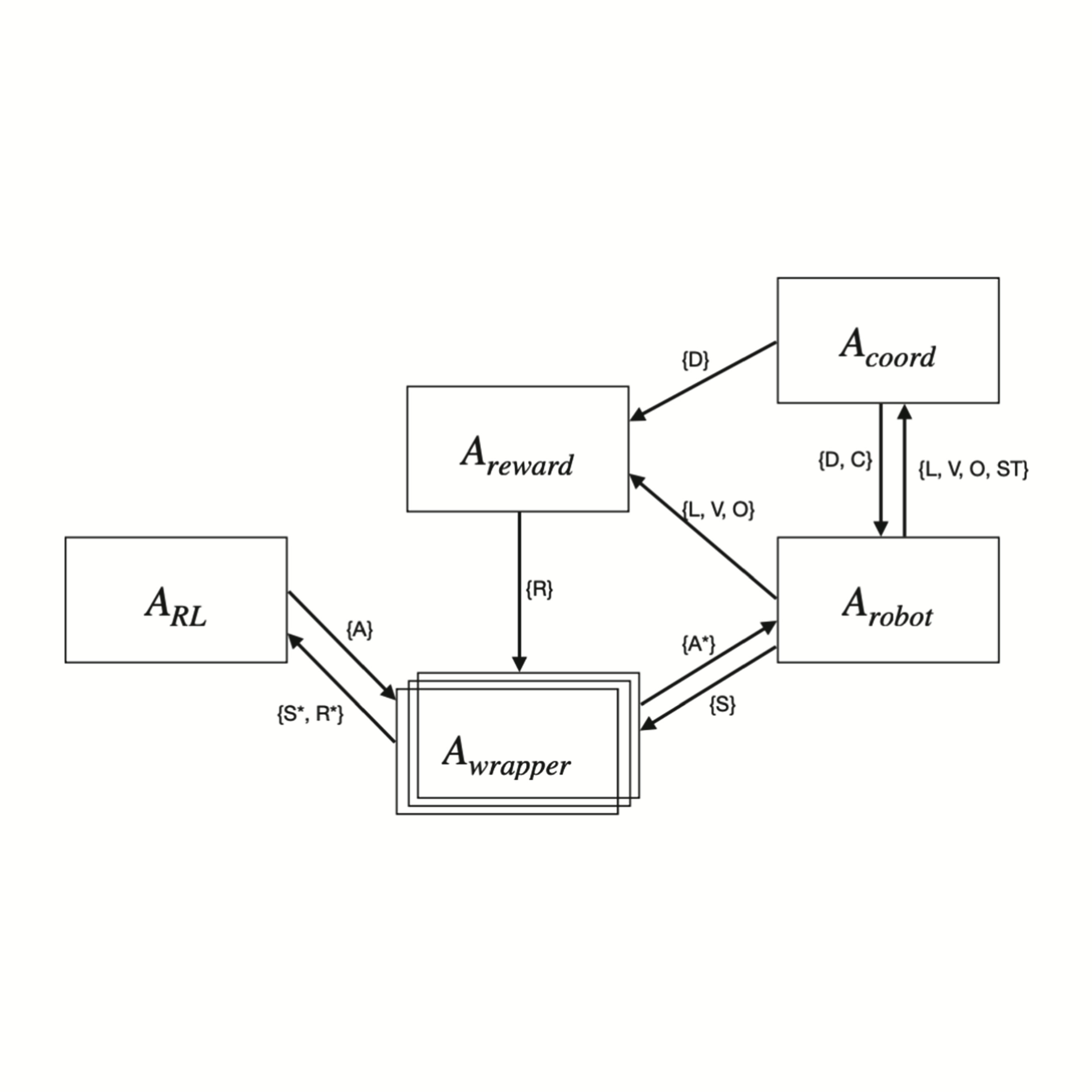
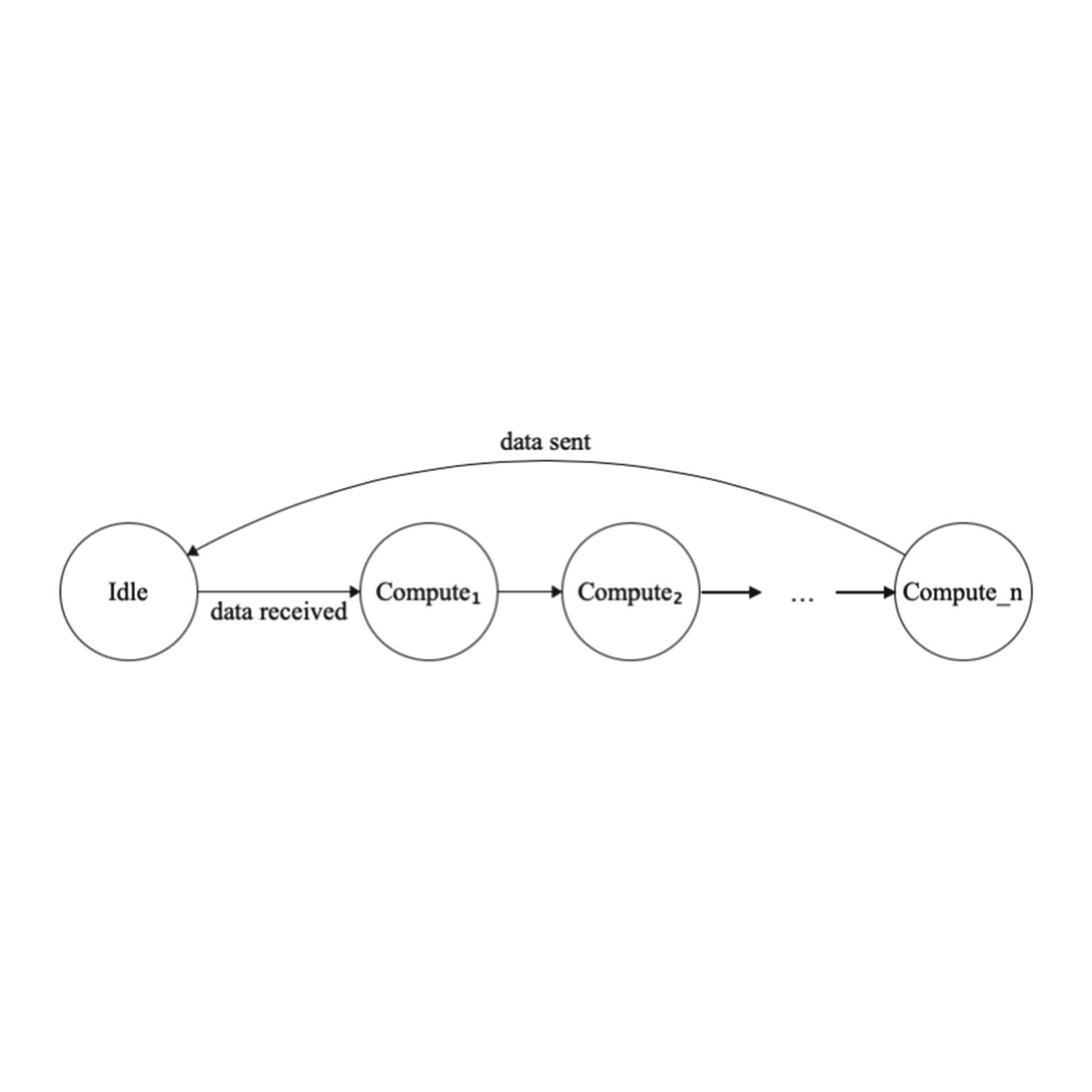
- Figure 4. Specification of Computational Agents.
-
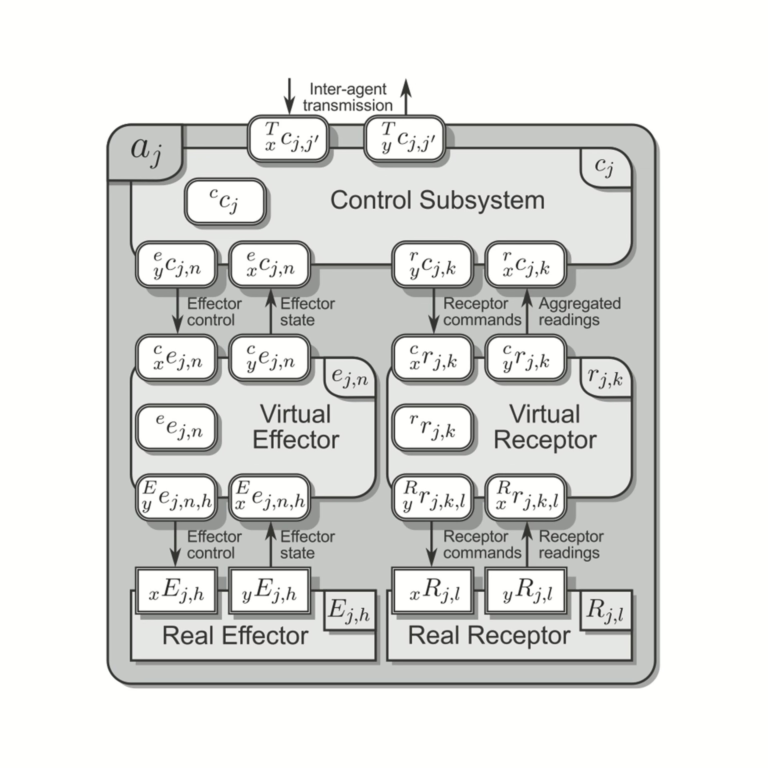
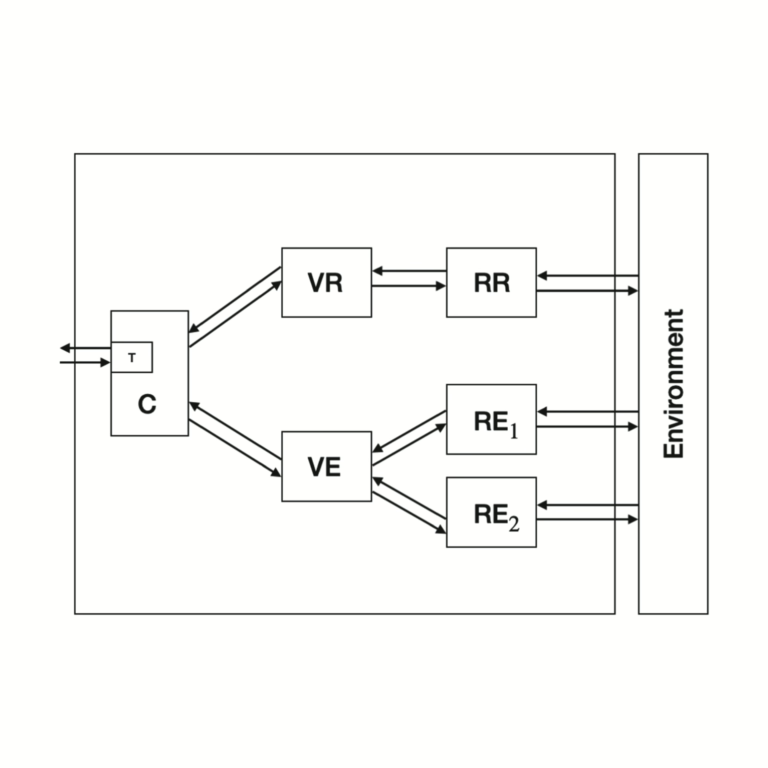
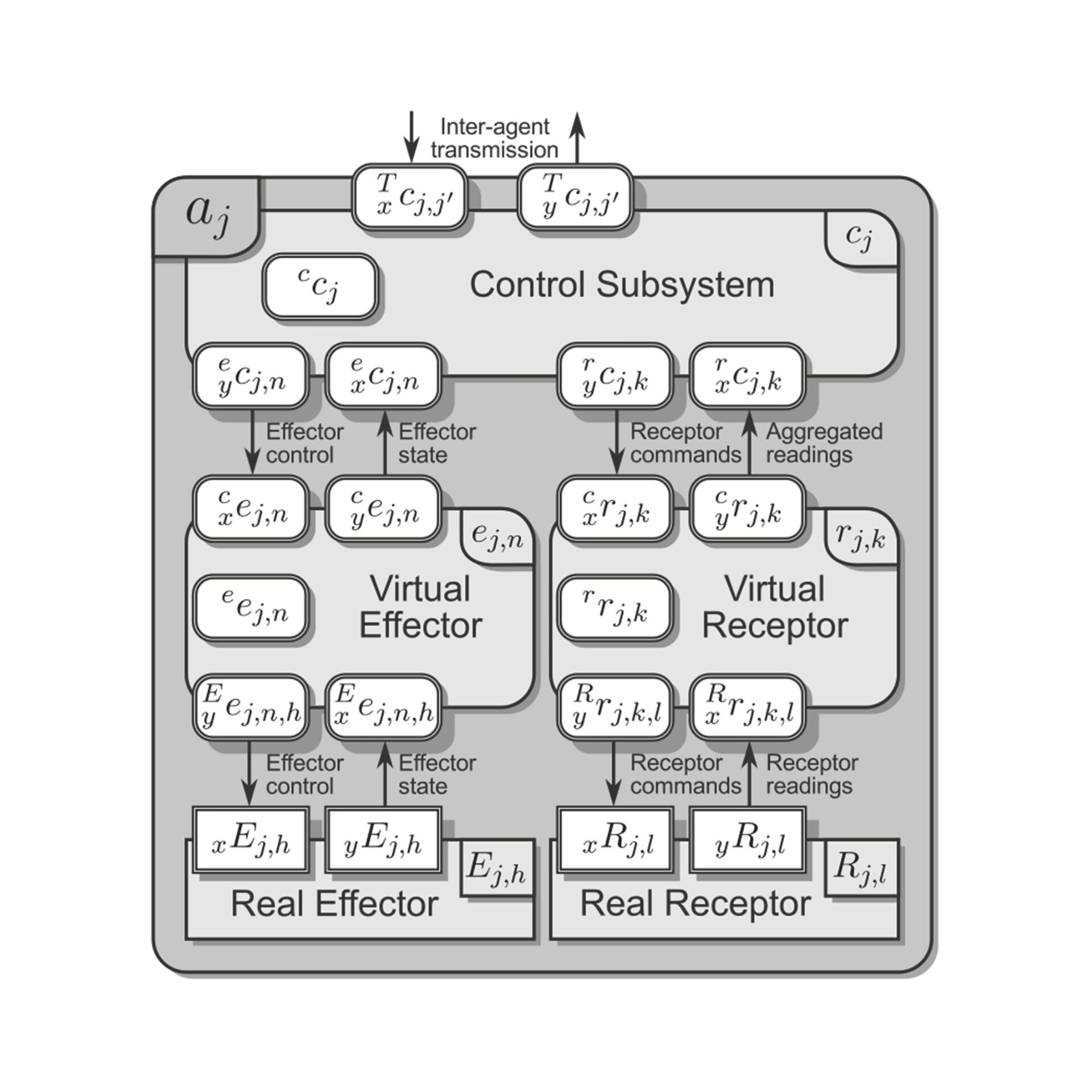
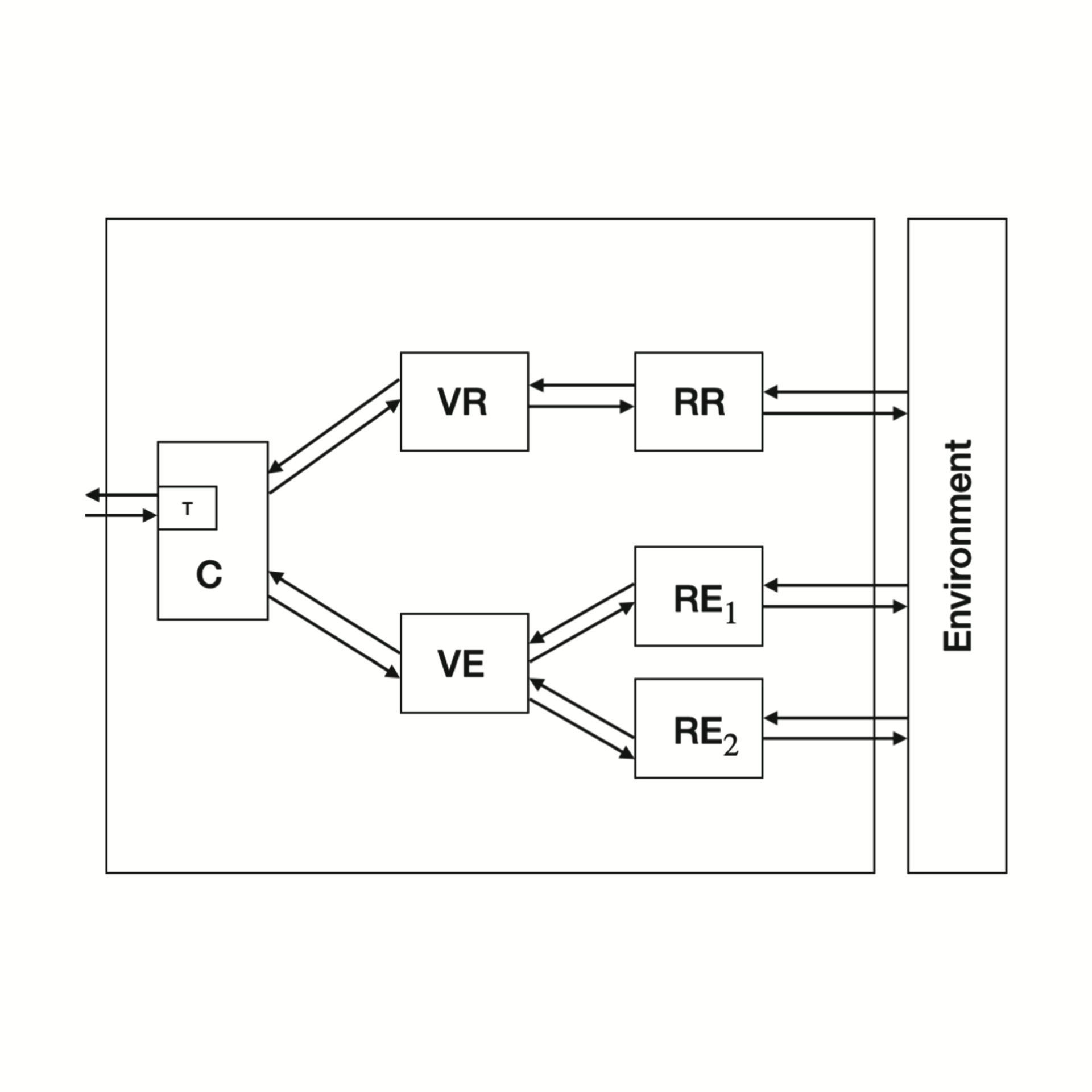
- Figure 5. General Embodied Agent Structure.
-
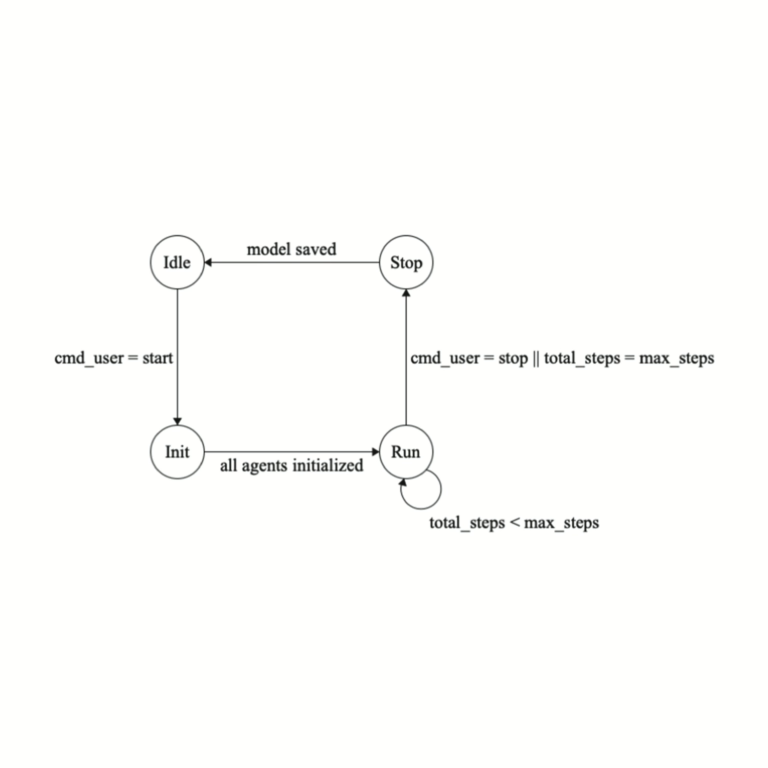
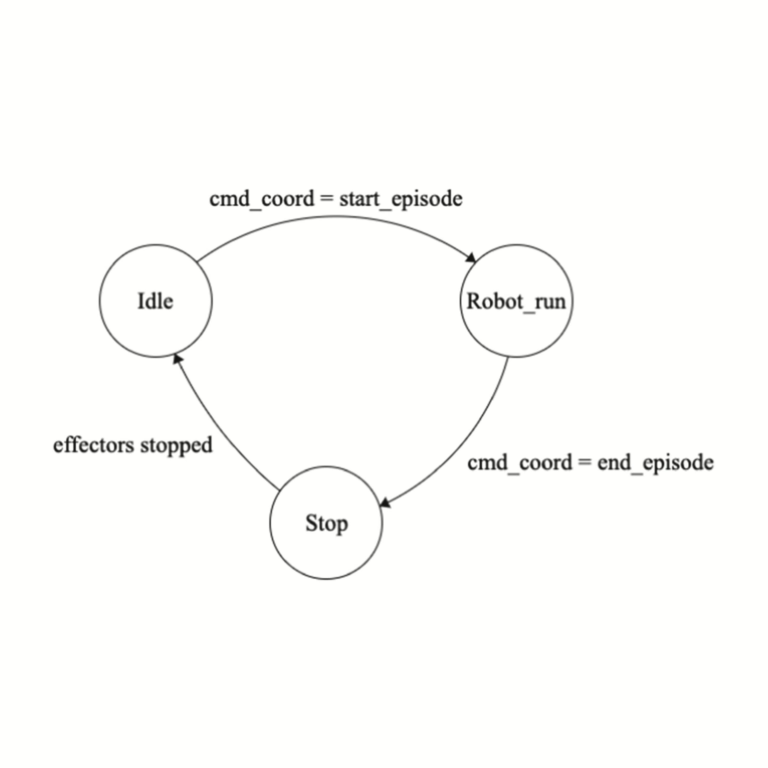
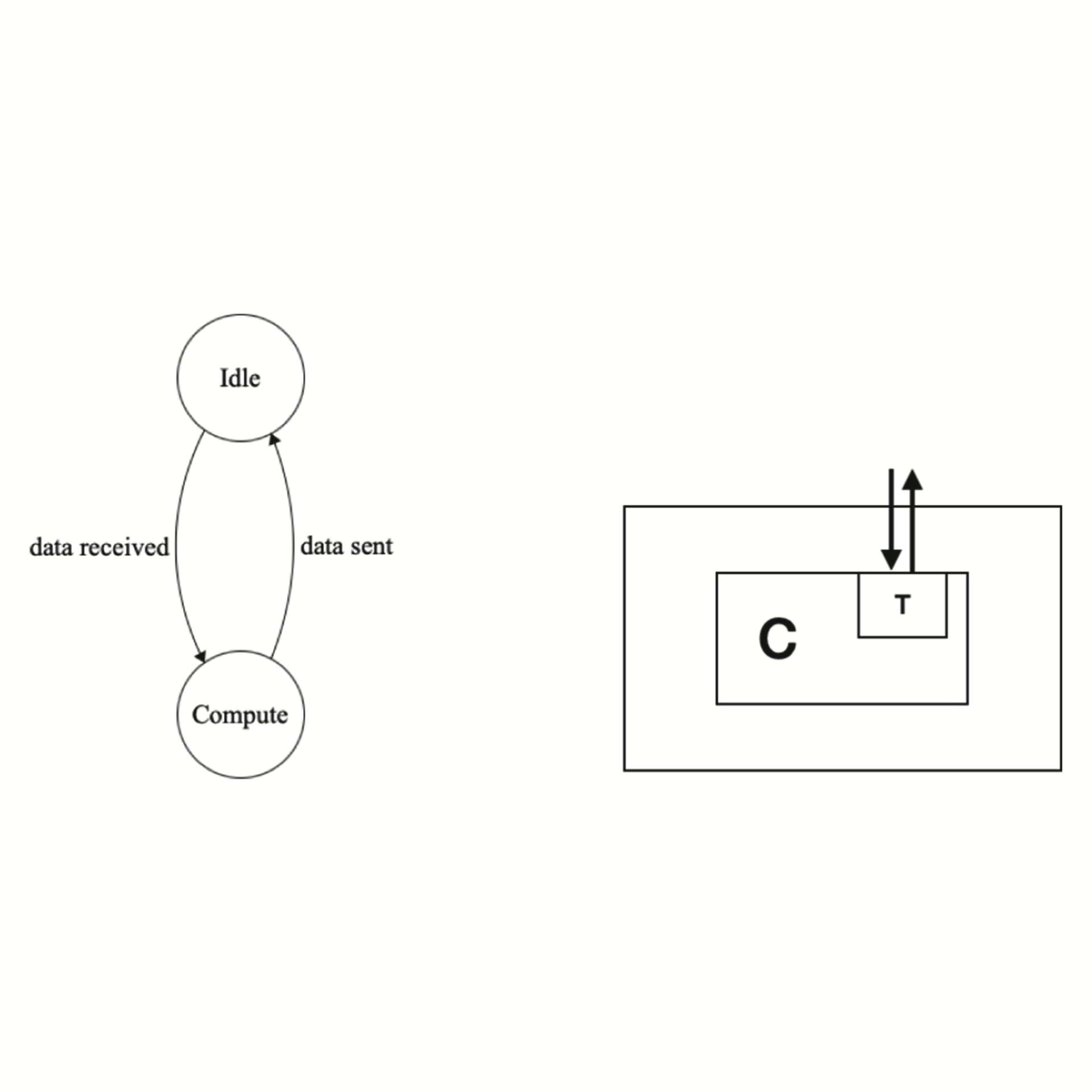
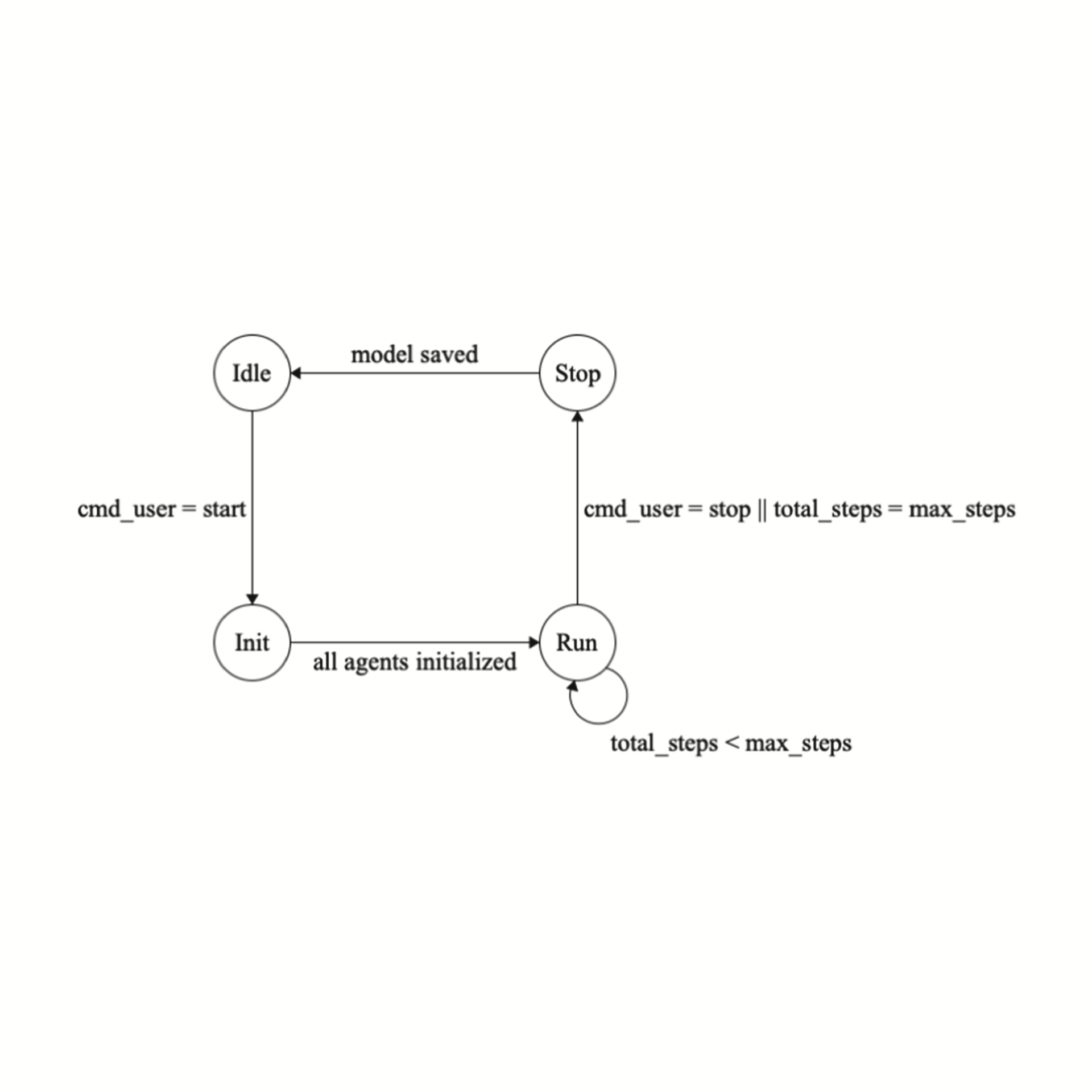
- Figure 6. FSM of Coordinator Agent.
-
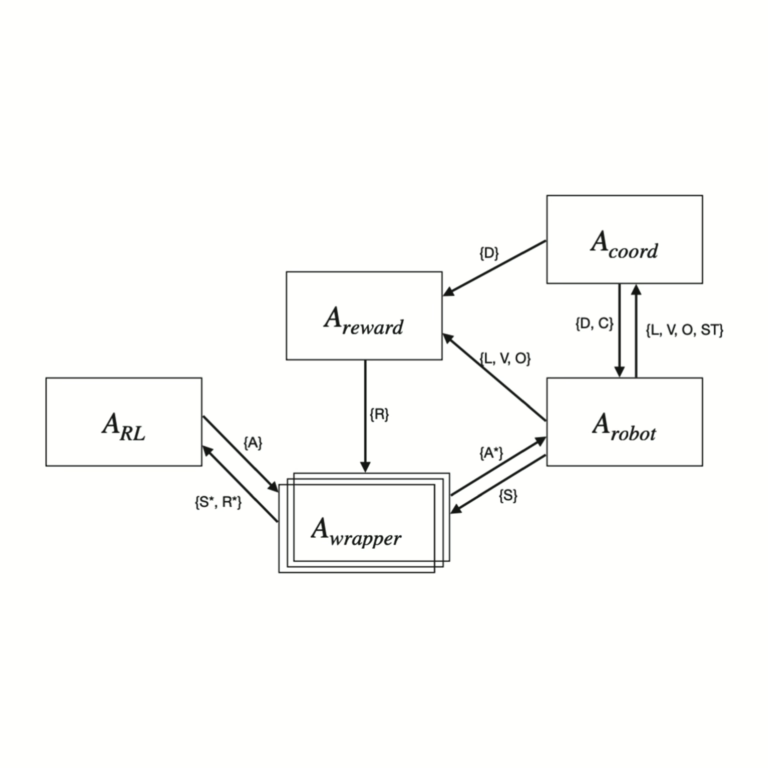
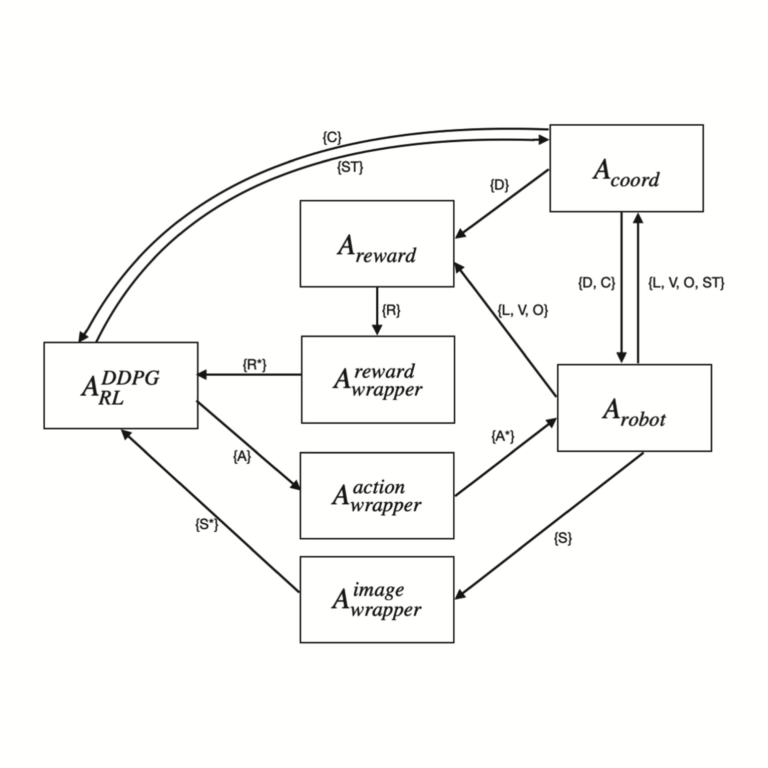
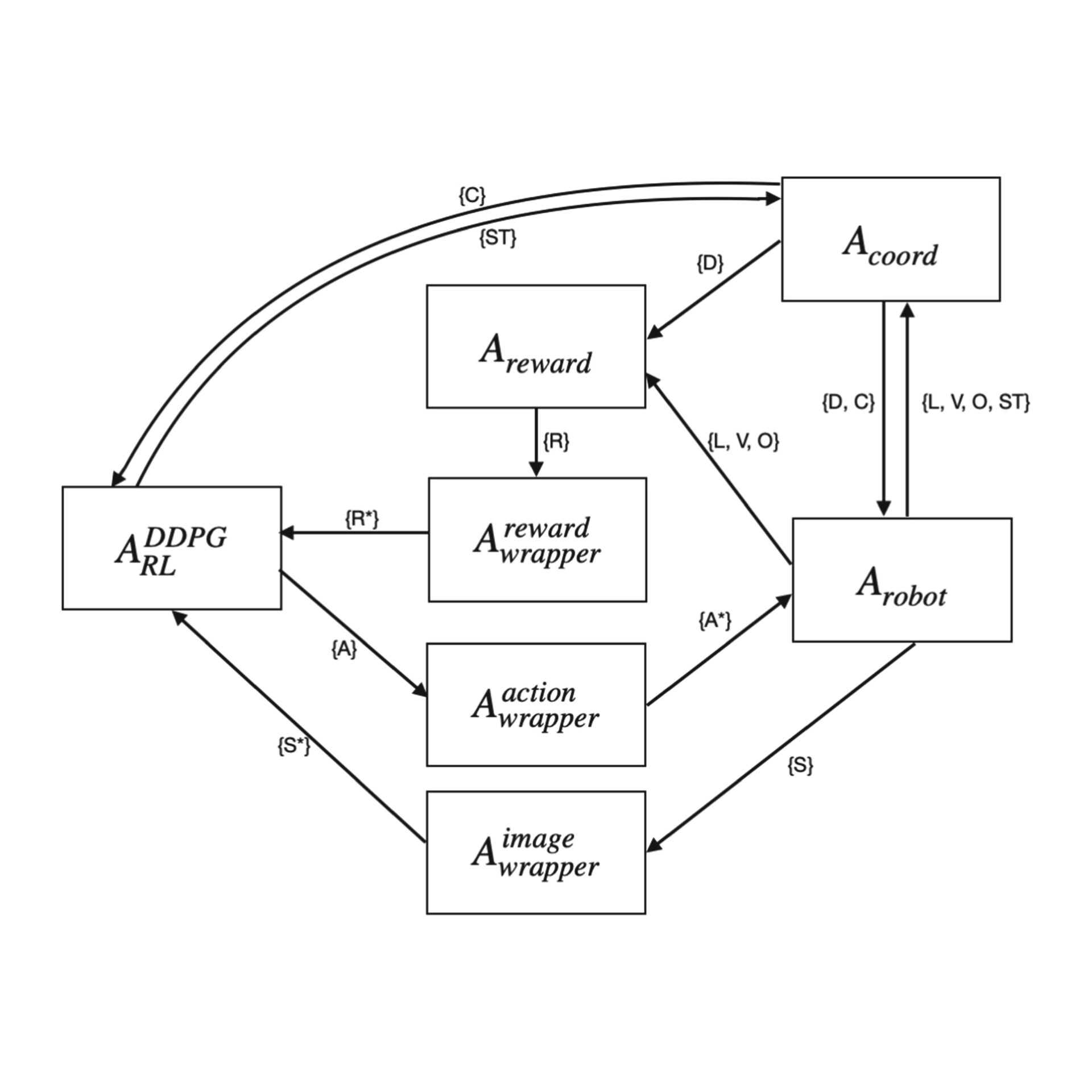
- Figure 7. System Structure with Active Coordinator Agent.
-
- Figure 8. Embodied Agent Structure of Robot Agent.
-
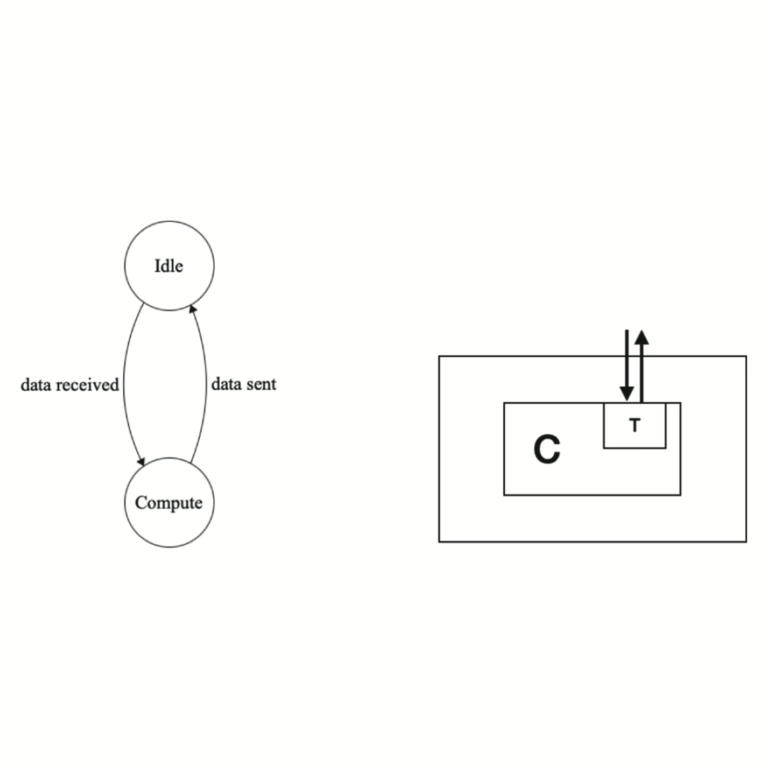
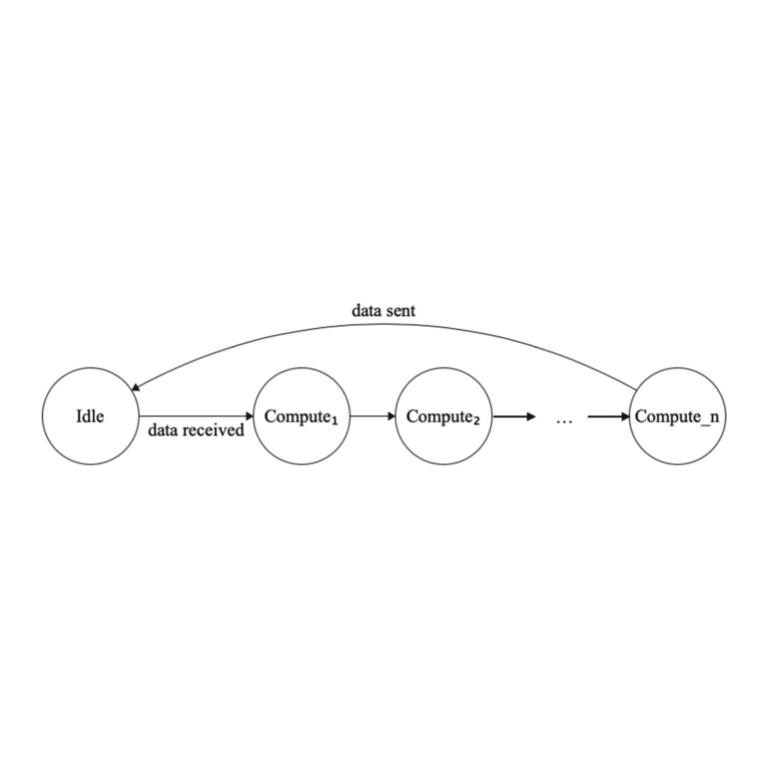
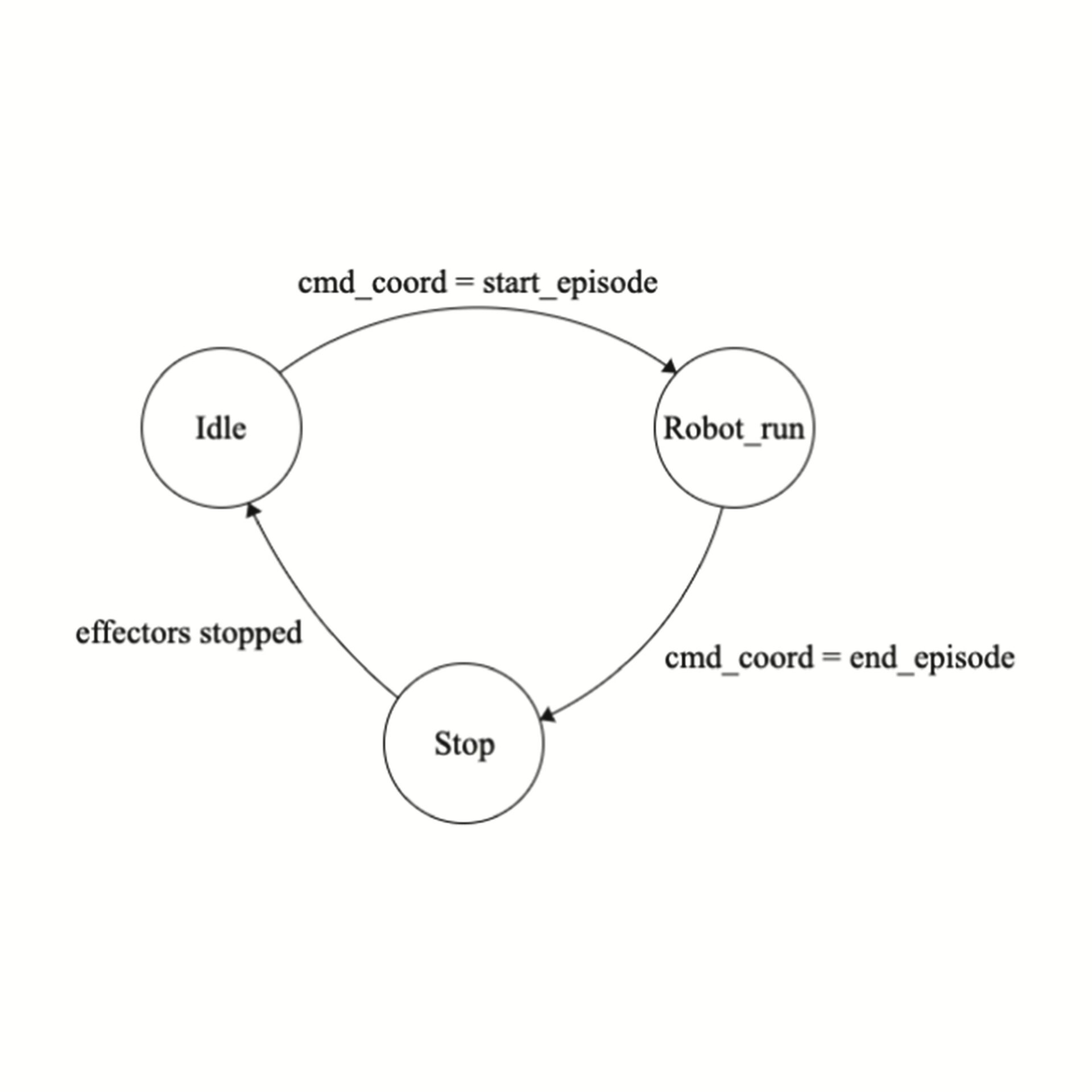
- Figure 9. FSM of Robot Agent.
-
- Figure 10. Extended FSM of Wrapper Agent.
-
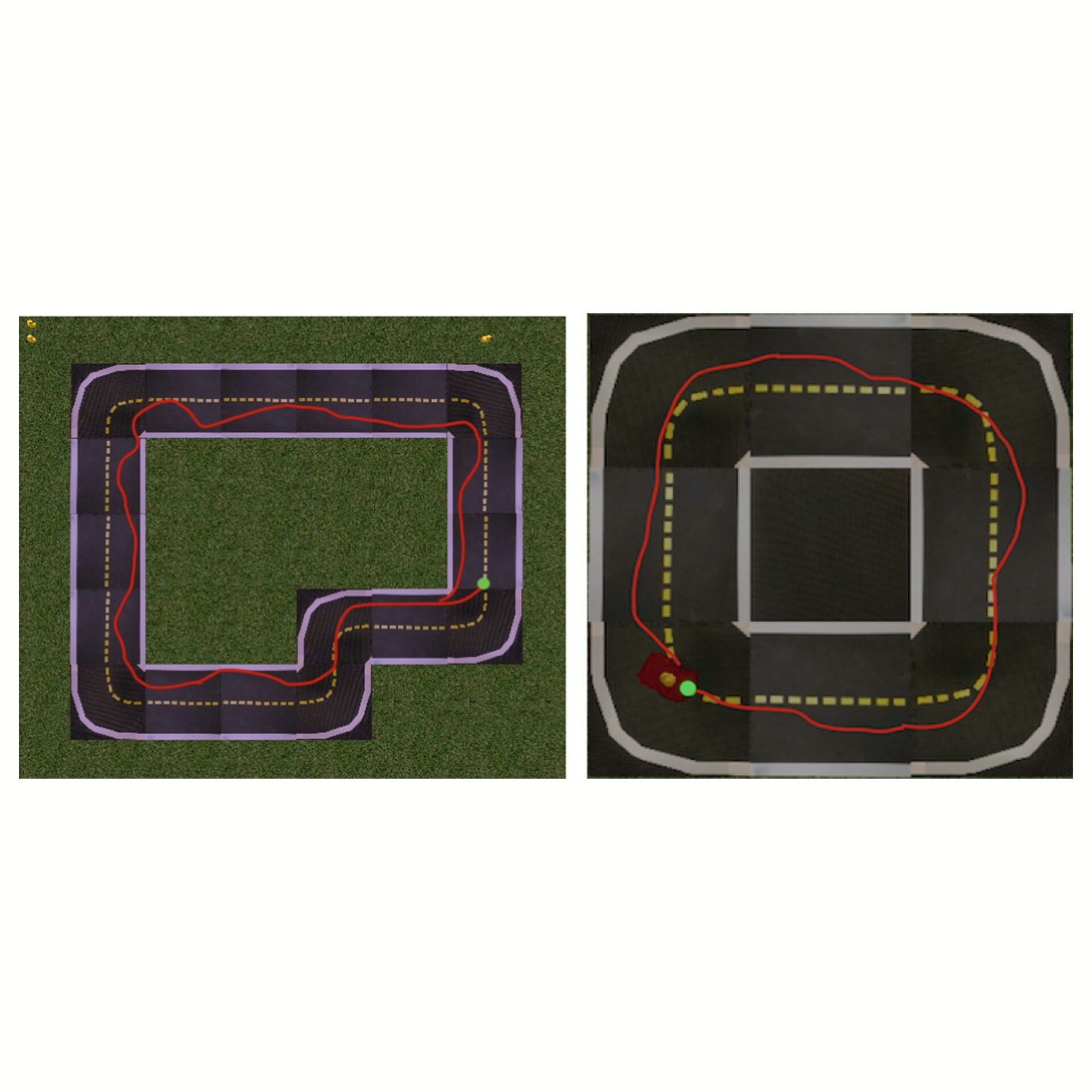
- Figure 11. Implementation of ARS in Real and Simulated Environments.
-
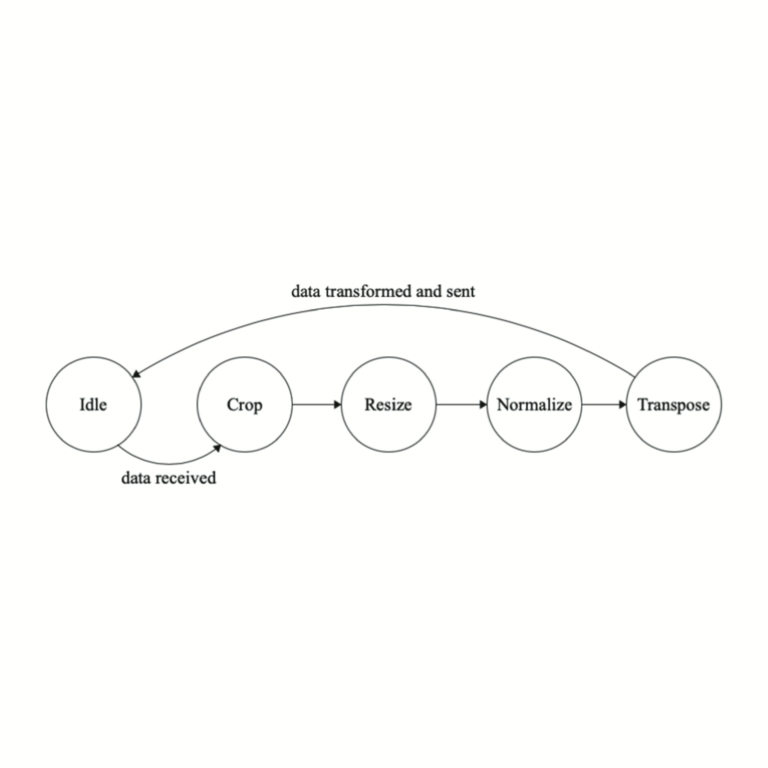
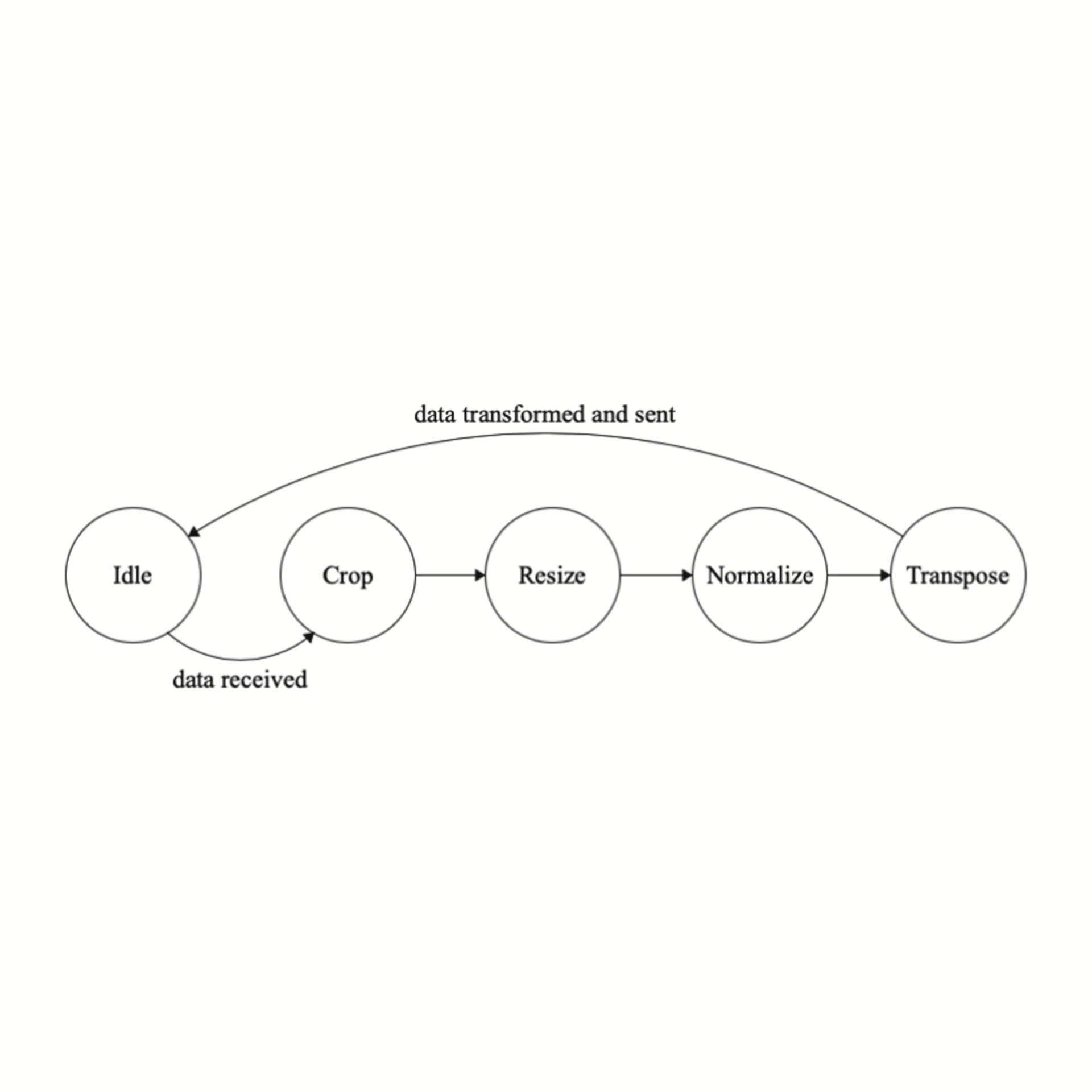
- Figure 12. Image Wrapper FSM.
-
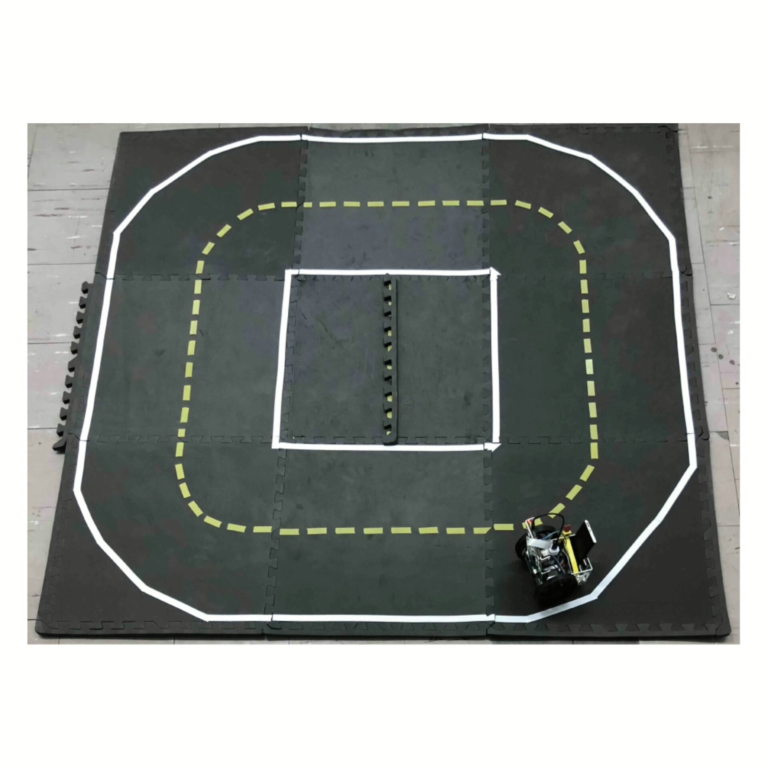
- Figure 13. Simple Loop Built as Part of Real-World ARS.

-
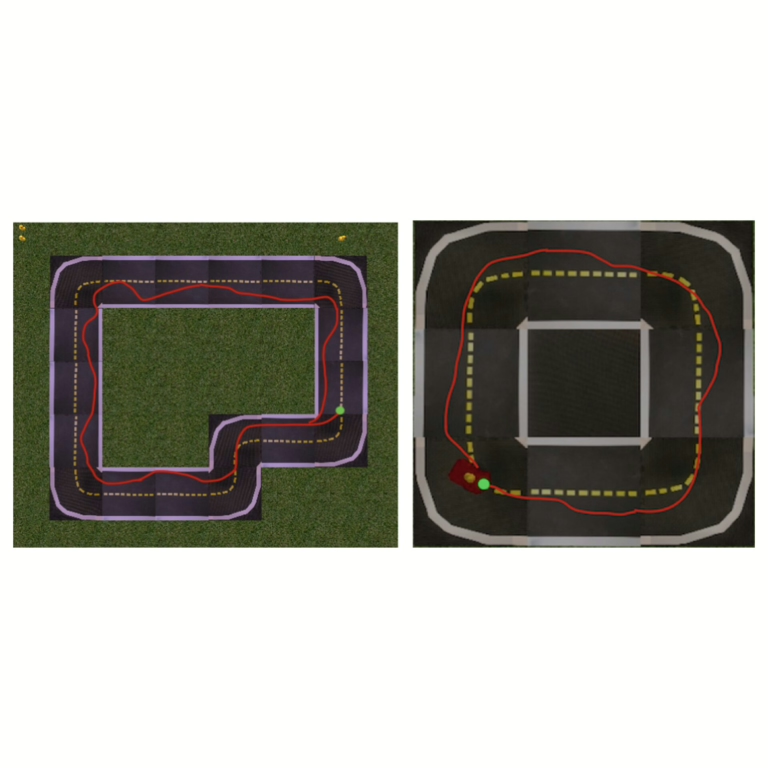
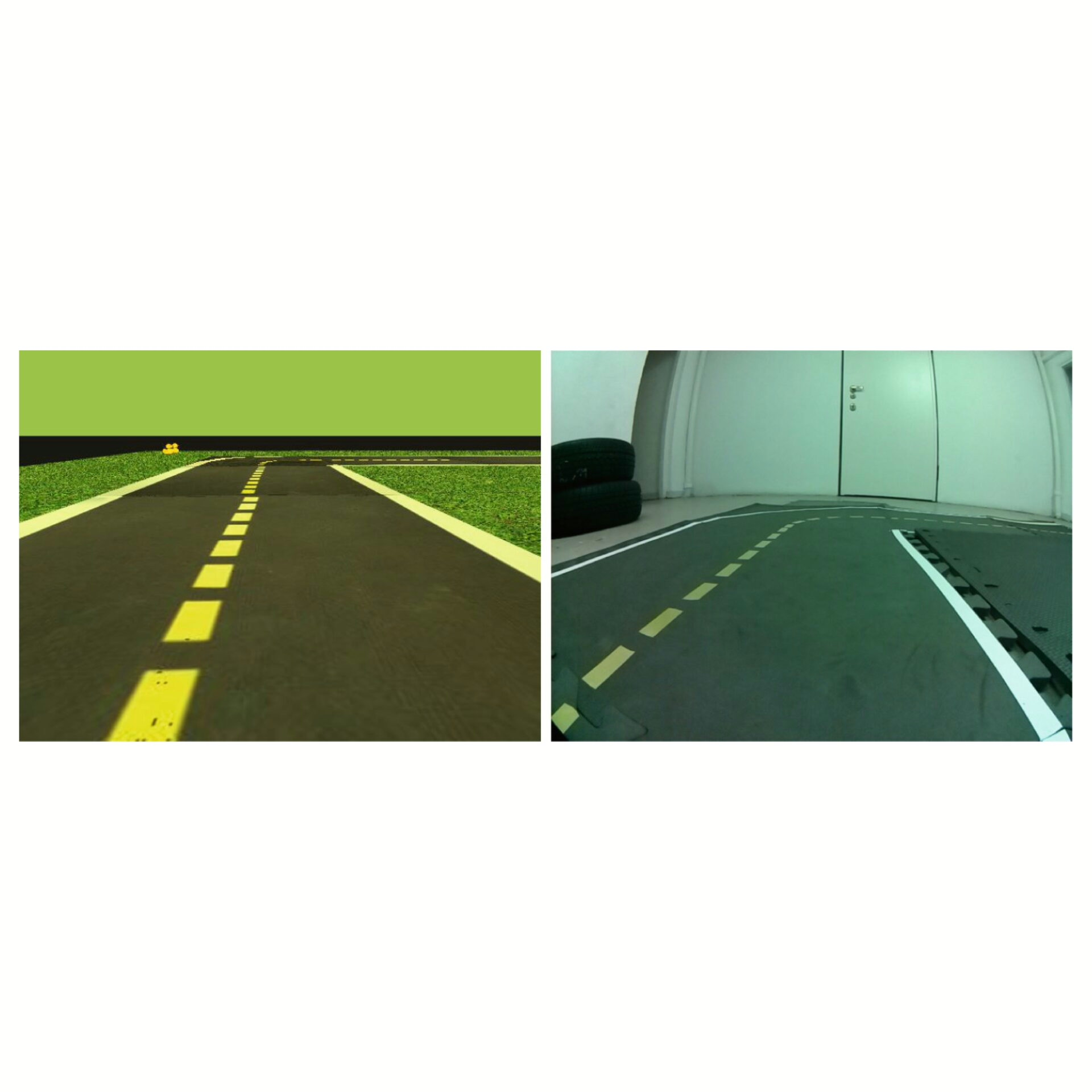
- Figure 13. Raw Observations from Both Environments.
-
- Figure 14. Robot Trajectories on Evaluation Maps in Simulator.