Project cSLAM – Simultaneous Localization and Mapping (SLAM) is a successful approach for robots to estimate their position and orientation in the world they operate in, while at the same time creating a representation of their surroundings.
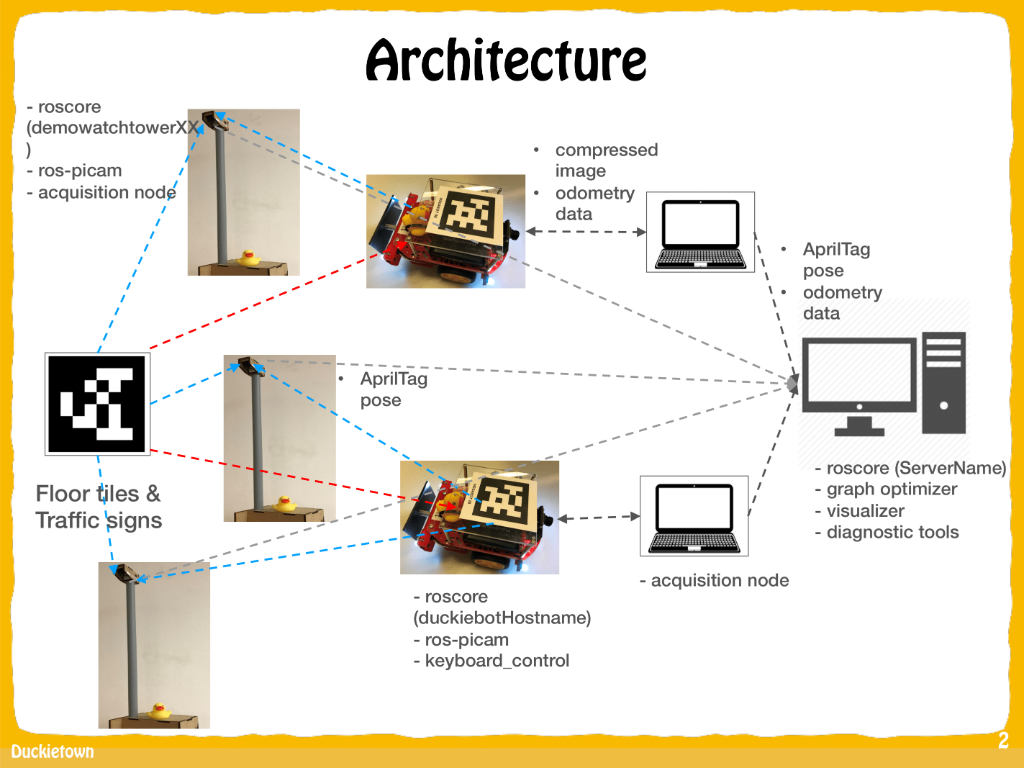
This project, centralized SLAM (or cSLAM), enables a Duckiebot to localize itself, while the watchtowers and Duckiebots work together to build a map of the city. The task is achieved by using the camera of the Duckiebot, together with watchtowers located along the path, to detect AprilTags attached to the tiles, the traffic signs, and the Duckiebot itself.
P. S. Anatidaephilia, is Latin for loving, and being addicted to, the idea that somewhere, somehow, a duck is watching you.
cSLAM algorithm physical architecture for localizing Duckiebots. Watchtowers are traffic lights without lights, and are used to transform Duckietown in Autolabs.
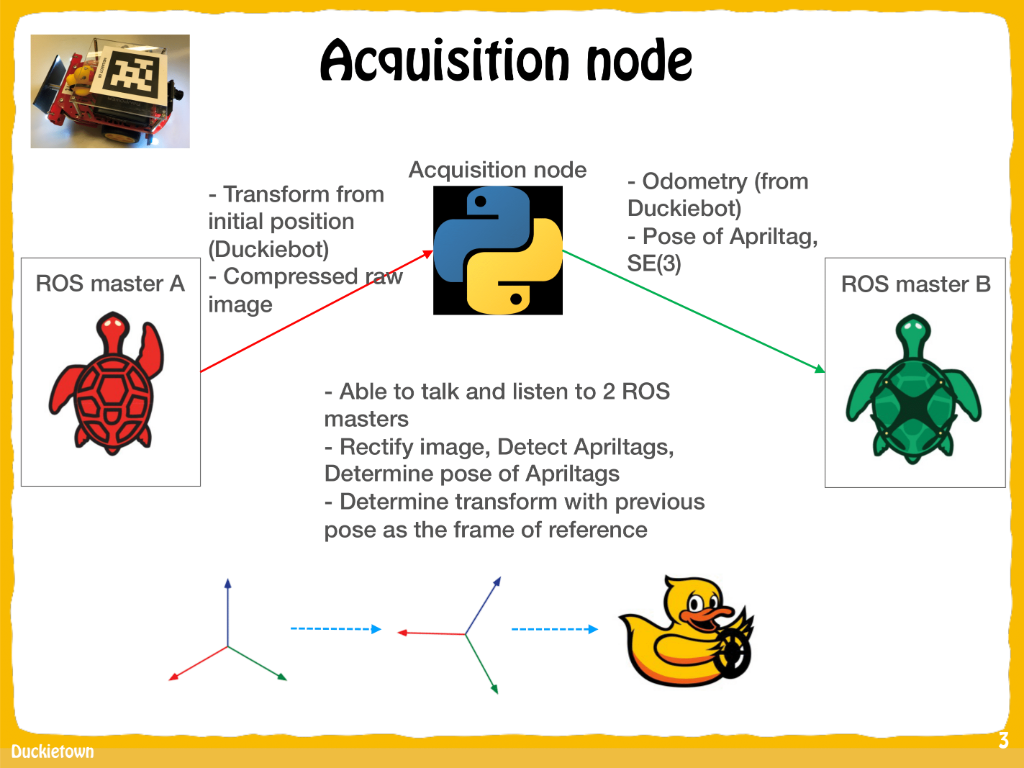
Duckietown cSLAM logical architecture for merging sensor measurements from robots and the city.
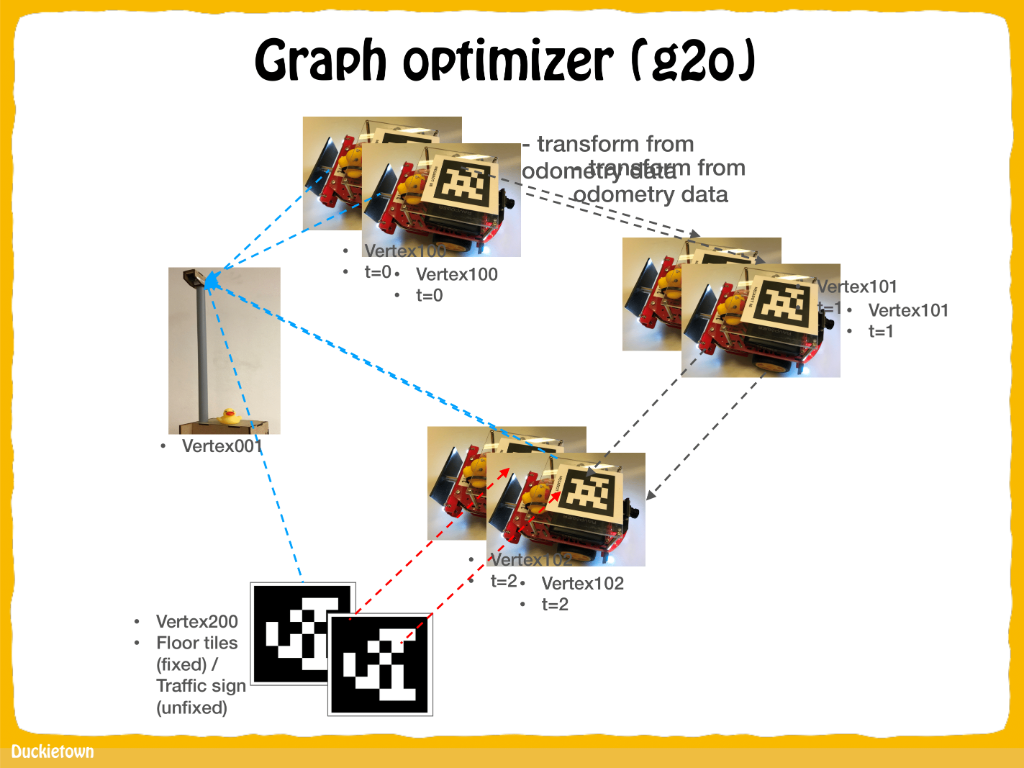
AprilTag detections from Watchtowers and Duckiebots are harmonized by solving a minimization problem.
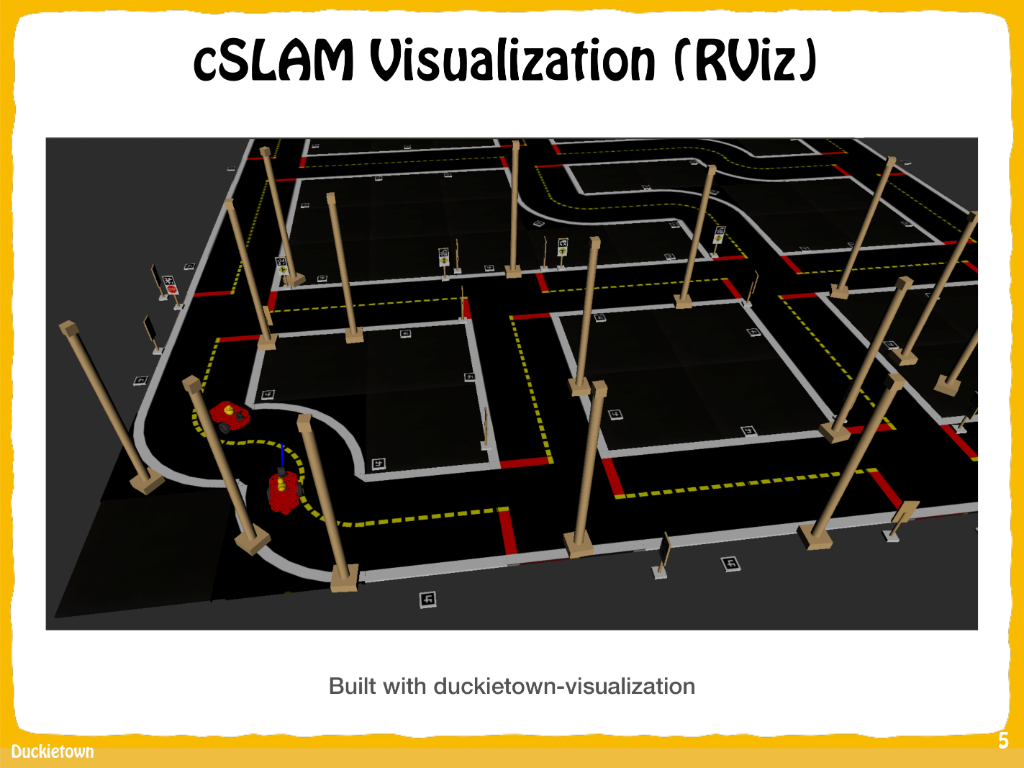
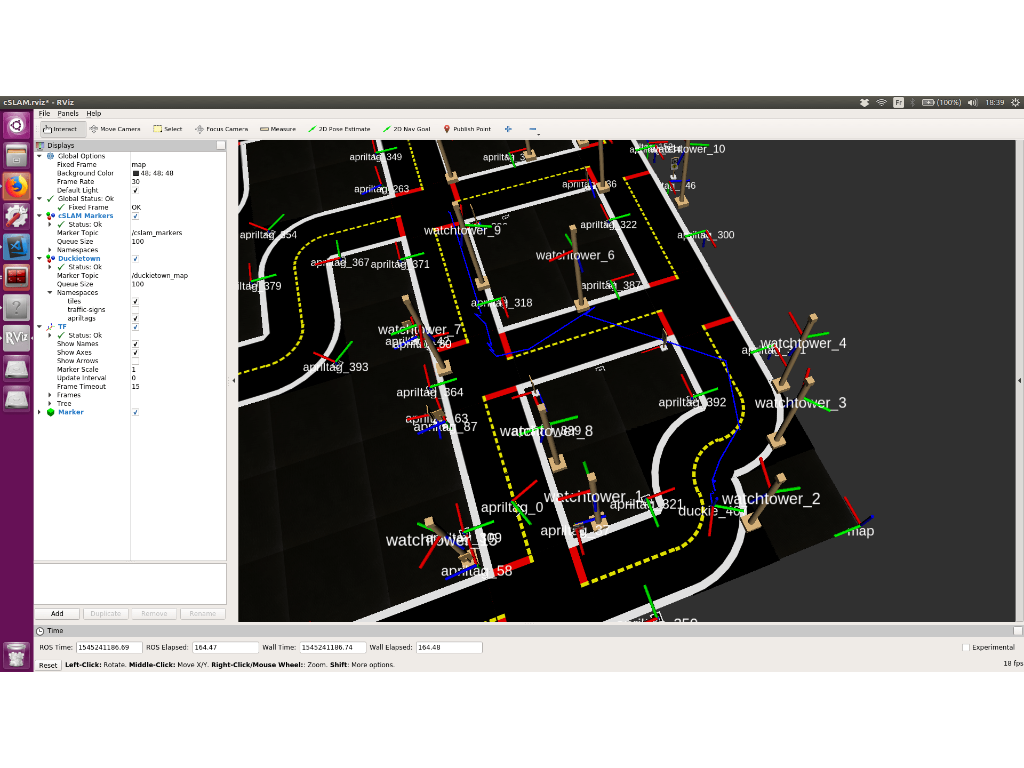
RViz reconstruction of experimental localization outcomes.
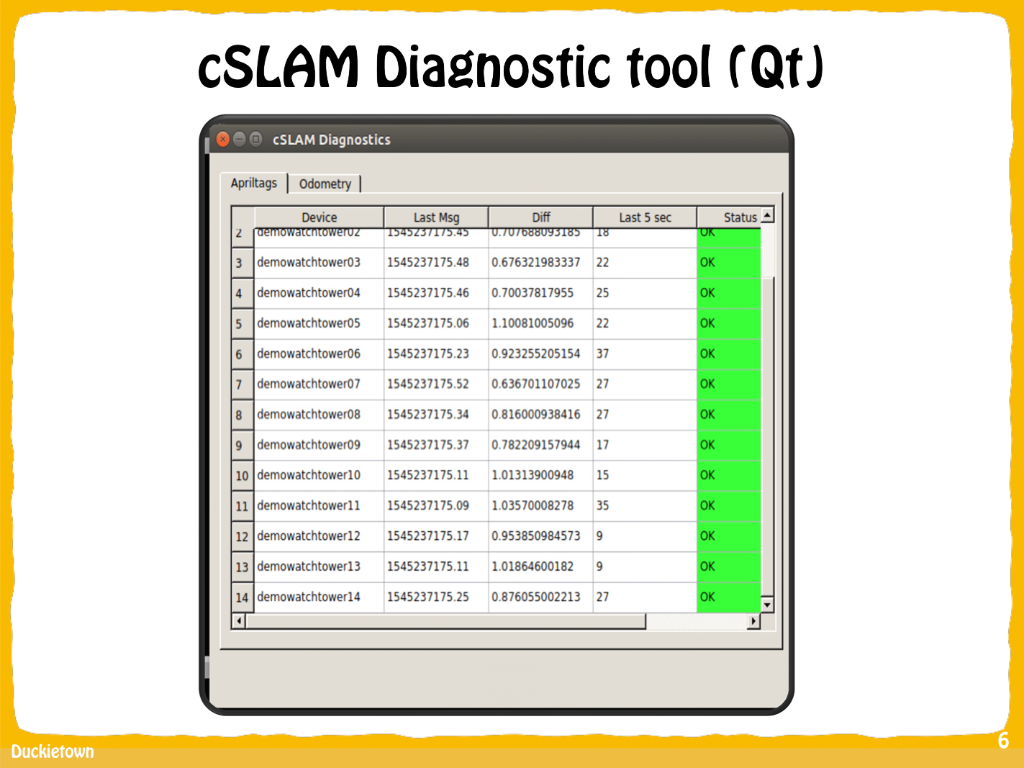
cSLAM Autolab watchtowers network diagnostic
cSLAM Project Results
(Turn on the sound for best experience!)
This work developed into a paper, check the article here.
Duckietown is a modular, customizable and state-of-the-art platform for creating and disseminating robotics and AI learning experiences.
It is designed to teach, learn, and do research: from exploring the fundamentals of computer science and automation to pushing the boundaries of knowledge.