Reinforcement Learning in Duckiematrix Real-Time - objectives and approach
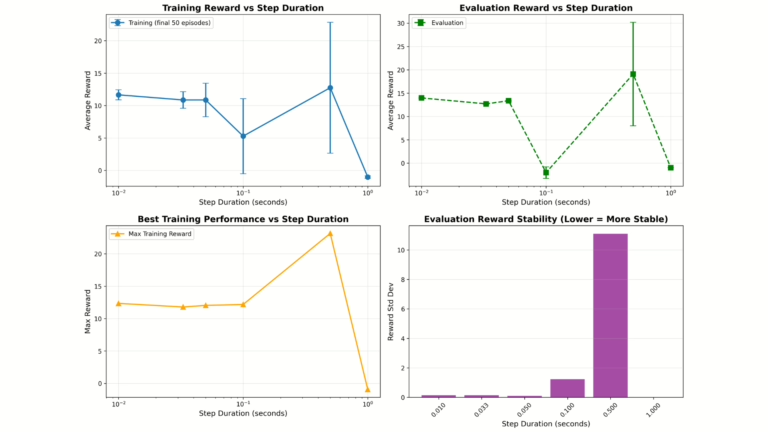
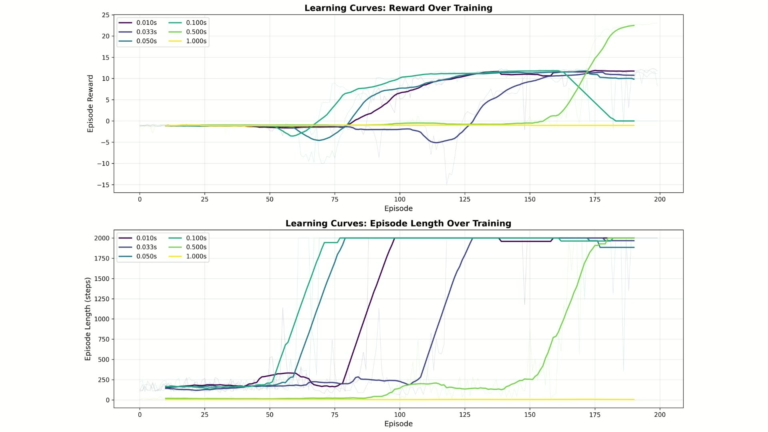
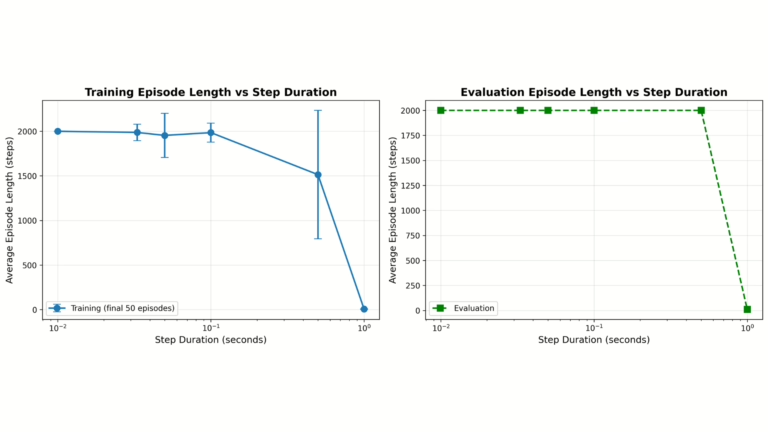
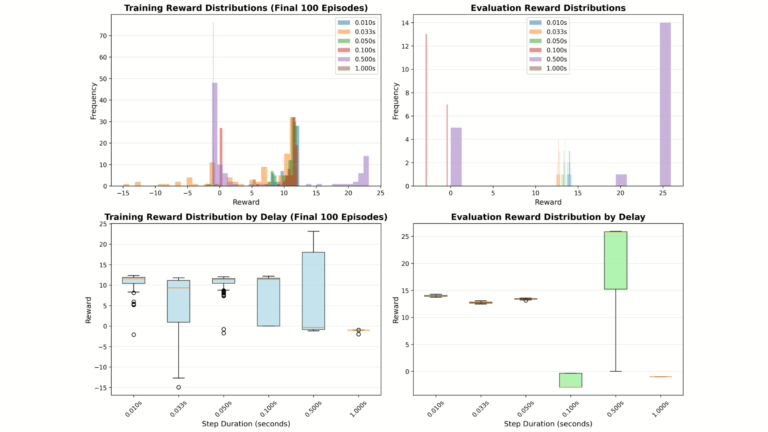
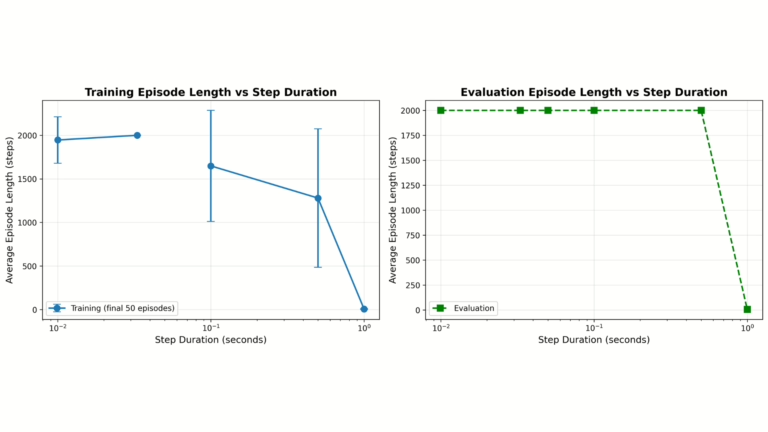
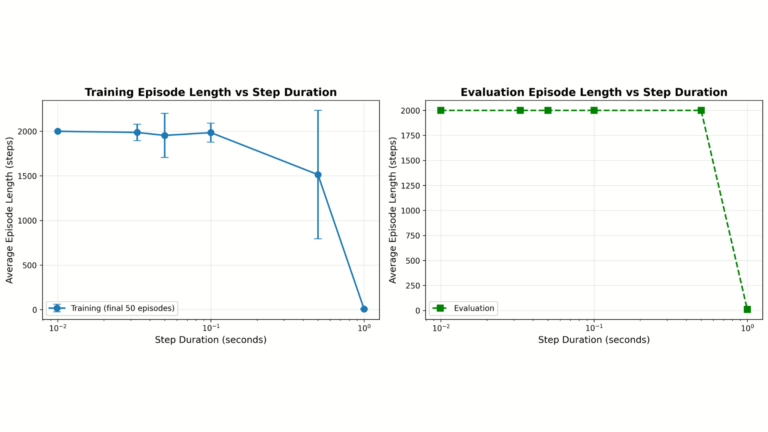
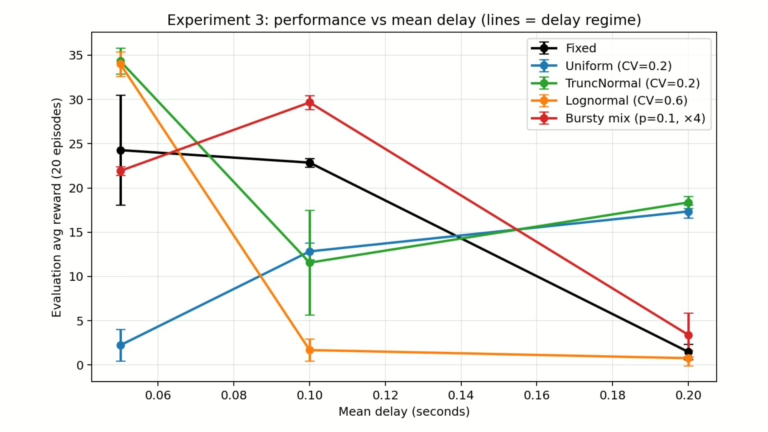
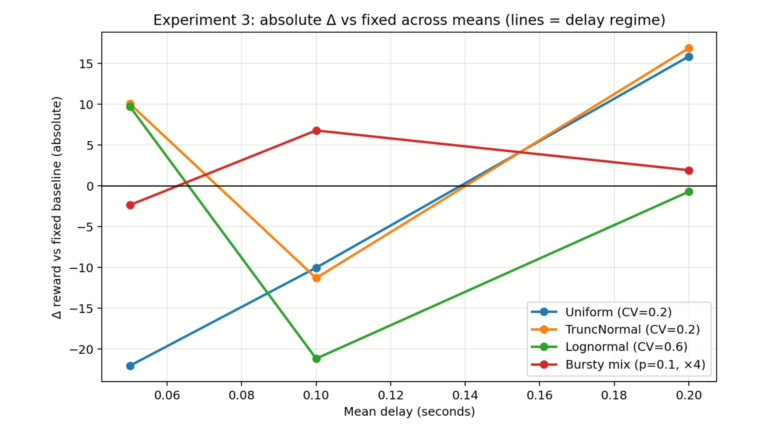
The objective of this project is to evaluate Reinforcement Learning performance in Duckiematrix under real-time constraints in Duckietown by quantifying the impact of computation delay on policy performance, reward, and episode length in autonomous driving tasks.
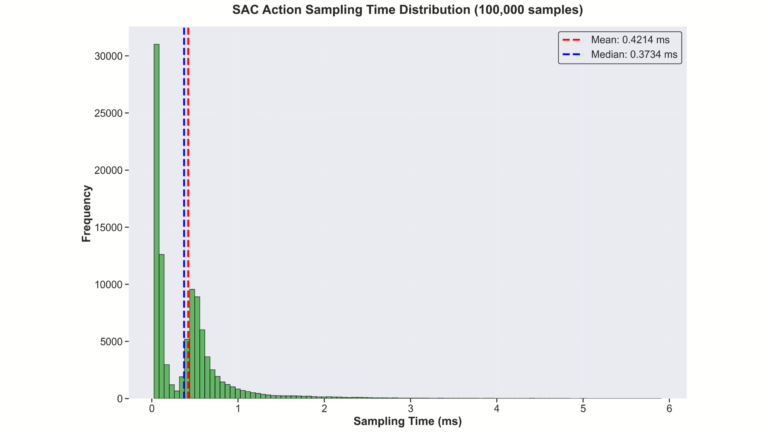
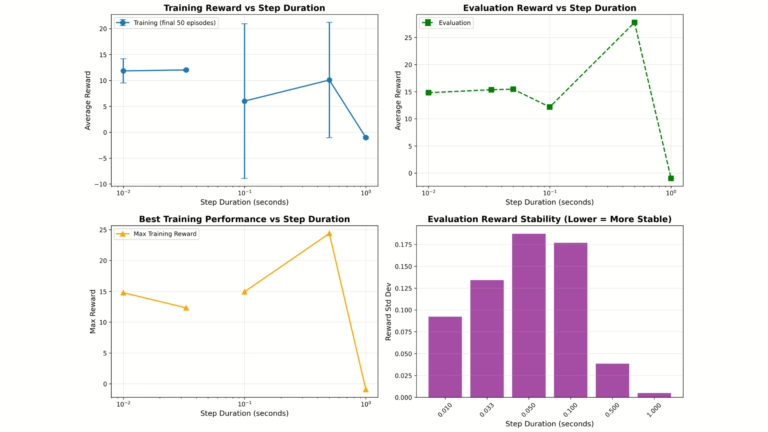
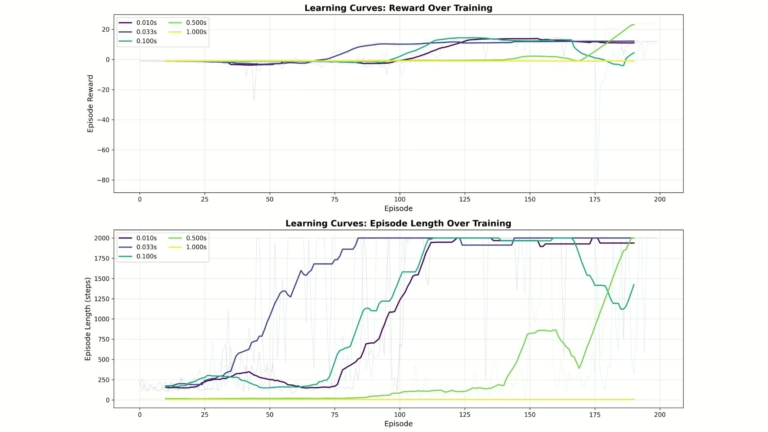
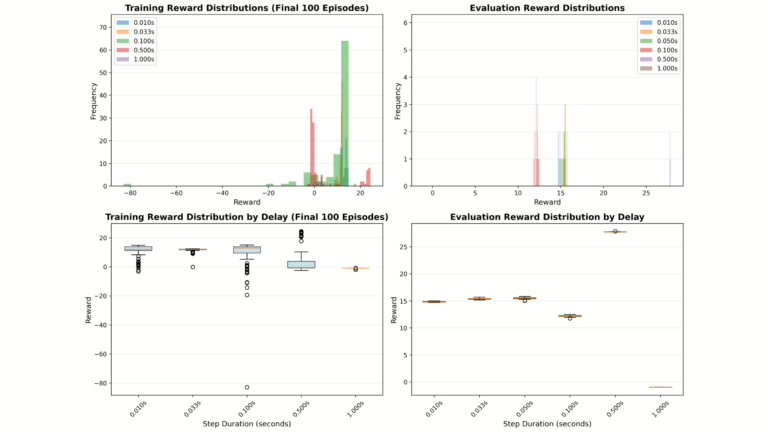
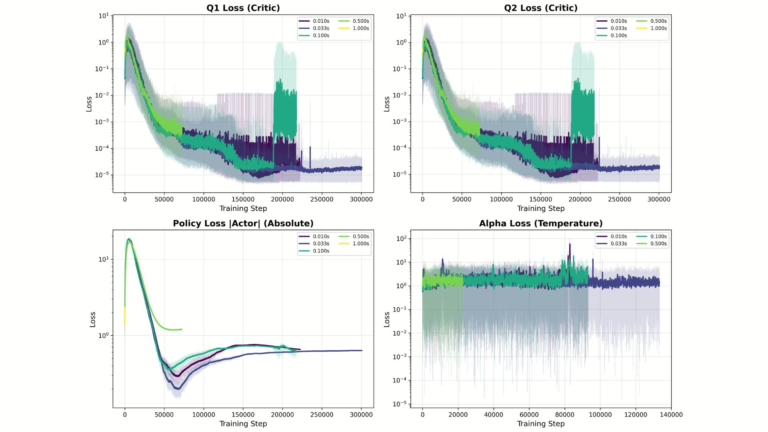
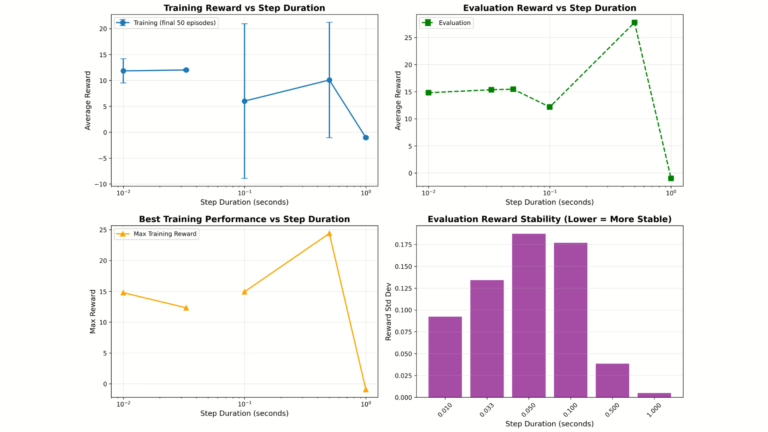
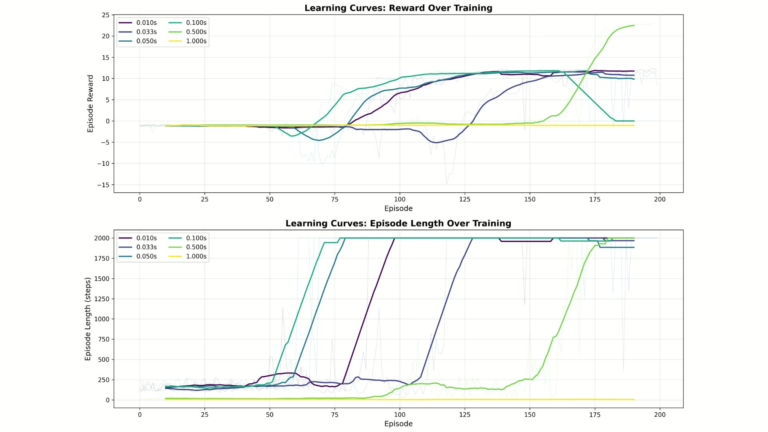
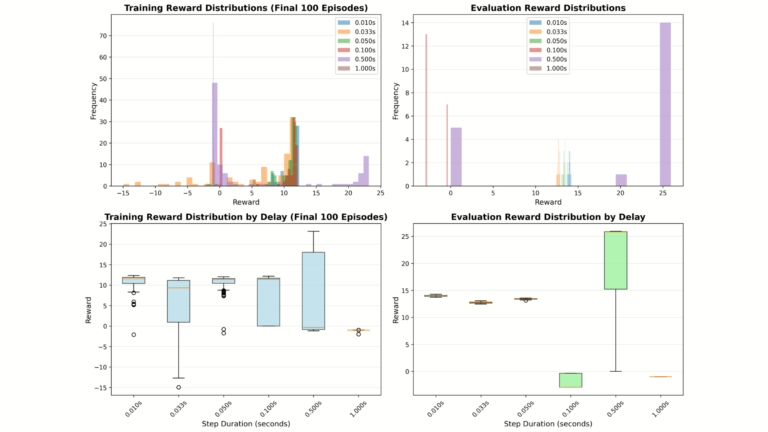
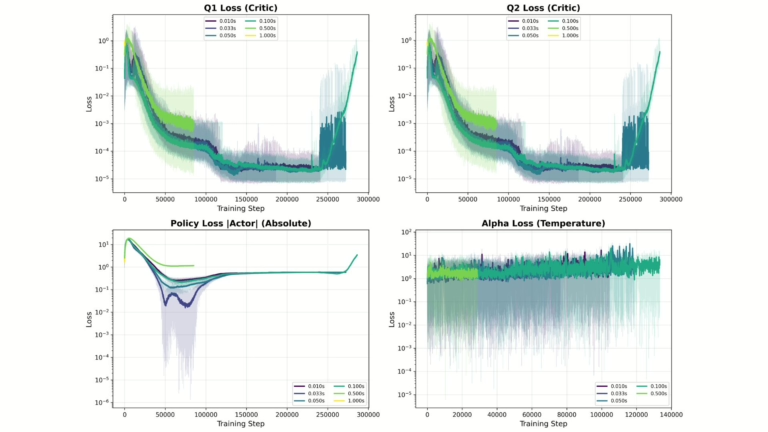
The approach implements Soft Actor-Critic (SAC) based Reinforcement Learning models in Duckiematrix simulation, introduces controlled fixed and variable time delays in the environment loop, and compares classical Reinforcement Learning policies π(at | st) with action-conditioned Real-Time Reinforcement Learning policies π(at | st−1, at−1) using evaluation reward, reward variance, and episode length metrics across multiple delay distributions.
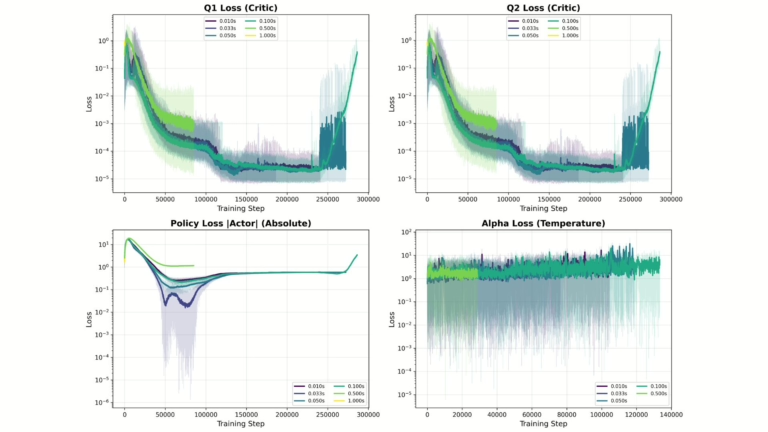
The challenges in this project involve modeling Reinforcement Learning in Duckiematrix under real-time constraints in Duckietown where computation delay violates the Markov Decision Process assumption of instantaneous state–action transitions, resulting in state–action mismatch, policy instability, and reward degradation. Fixed and variable delay distributions introduce non-stationarity, increased variance in evaluation reward, and failure modes at higher delays (≥0.1s for classical RL and ≥1.0s for both methods), while stochastic latency from neural network inference impacts policy execution timing, convergence behavior, and sample efficiency.
Additional challenges include maintaining stability in Soft Actor-Critic training under delayed feedback, handling missing training metrics, ensuring robustness across delay distributions, and evaluating performance using consistent metrics such as reward, variance, and episode length across multiple experimental conditions.
Looking for similar projects?
Check out the following works on sim-to-real with Duckietown:
Nicolas Bosteels is a Master’s Research student at Mila Institute in Montreal, Canada.
Learn more
Duckietown is a modular, customizable platform for robotics and artificial intelligence education, enabling hands-on learning and real-world experimentation with autonomous systems.
Designed for teaching, learning, and research, Duckietown supports the full spectrum of autonomy development, from foundational computer science and robotics concepts to advanced AI and self-driving systems research.
These spotlight projects are shared to demonstrate how Duckietown bridges theory and practice in robotics and AI, empowering students to apply machine learning and autonomy techniques to physical robots while building practical skills valued in academic research and industry.
The DB21Jv3 Duckiebot upgrade kit improves the omnidirectional wheel, reduces assembly time and increases compatibility with a range of Jetson Nano kits.
The DB21v3-J Duckiebot upgrade kit increases Duckiebot lifespan, enhances compatibility with different Jetson Nano 4GB development kits, improves driving performance, and reduces chassis assembly time.
Upgrading your Duckiebot from DB21-M or -J to DB21-Jv3
Building on the experience and feedback from users worldwide, Duckiebots have undergone many design iterations throughout the years.
This chassis upgrade, from DB21M or -J to DB21(v3)-J, introduces long-awaited improvements to the Duckiebot DB21 design, leading to shorter assembly time, better driving performance, and an overall improved user experience.
New omnidirectional wheel
A new omnidirectional wheel replaces the previous metal one, providing the following advantages with respect to the (historical) previous model:
Improved rigidity: Three points of contact with the chassis instead of two, for improved rigidity and overall better driving performance
Designed for maintenance: the new omnidirectional wheel can be opened and cleaned, providing an opportunity for removing the gunk that naturally builds up inside the wheel. This increases the life span of the wheel, and to some extent of the whole robot
Uniform friction in all directions: thanks to the symmetry design and the undeformable nature of the components, this wheel provides more isotropic performance with respect to the previous model, leading to less force disturbance on the chassis and overall better driving performances.
Easier assembly process
For those who have experienced building DB21M/J Duckiebots, the mechanical tolerances between the characteristic chassis design and the metal nuts occasionally led to frustration. By replacing the metal chassis assembly screws and bolts with Nylon ones, Duckiebots become:
Faster to assemble: thanks to perfect fits
More joyful to assemble: thanks to a more reproducible Duckiebot assembly experience
Compatible chassis
The upgraed chassis now supports multiple Jetson Nano variants, including Jetson Super Orin Nano, OKDOs C100 Jetson Nano 4GB development Kit, and Waveshare Jetson Dev Kit.
Duckietown is a set of tools that enables hands-on robotics and AI learning experiences.
It is designed to help teach, learn, and do research: from exploring the fundamentals of computer science and automation to pushing the boundaries of human knowledge.
Sim-to-Real Transfer for Small Autonomous Vehicles - objectives and approach
This study investigated whether an intermediate, low-fidelity simulator can be used to estimate the simulation-to-reality (Sim2Real) gap for autonomous driving models trained in a high-fidelity simulator.
Specifically, it proposes a Sim-to-Sim-to-Real evaluation pipeline in which deep reinforcement learning models are trained in CARLA, evaluated in Gym Duckietown, and finally deployed on a physical Duckiebot.
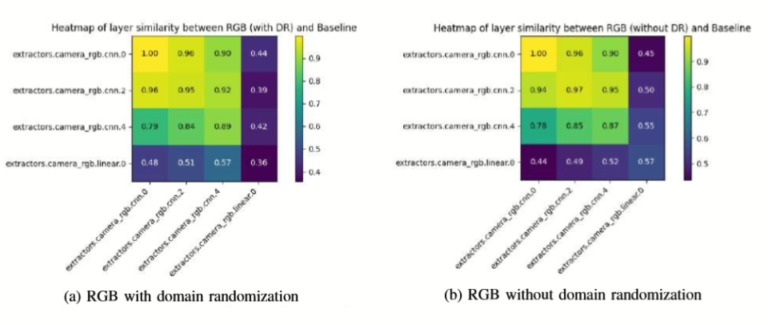
The objective is to determine to what extent performance in Gym Duckietown predicts real-world performance, and whether similarity in learned feature representations can serve as an indicator of successful Sim-to-Real transfer before deployment in the real world.
Sim-to-Real Transfer for Small Autonomous Vehicles - highlights
Reinforcement Learning Interaction Loop
Physical Duckietown Environment
Simulated Duckietown Environment
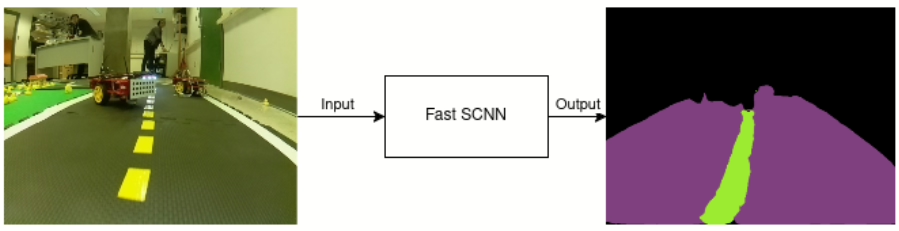
Semantic Segmentation Mask Example
FastSCNN Network Architecture
CARLA Semantic Segmentation Output
FastSCNN Input–Output Illustration
Reward Function Variables
NatureCNN Feature Extractor
Multi-Stage Evaluation Environments
CKA Feature Similarity Heatmaps
The challenges and the approach
A core challenge addressed in this work is the inherent difficulty in ensuring that solutions developed in simulation remain effective when deployed on physical hardware.
Discrepancies between simulated environments and real-world conditions can cause significant performance degradation, particularly for perception and control algorithms.
These challenges include visual domain shifts, differences in dynamics and sensor noise, and the need for robust generalization across environments. The study explored how intermediate simulation platforms can help anticipate real-world performance and provides insight into limitations of current sim-to-real transfer approaches, reinforcing the importance of iterative testing across simulation and physical testbeds.
The approach followed consisted of deploying identical software stacks across low-fidelity and high-fidelity simulators, followed by execution on physical Duckietown vehicles. Metrics are collected for perception accuracy, trajectory tracking error, control stability, and failure rates. Domain discrepancies are analyzed by isolating sensing noise, actuator modeling, latency, and environmental dynamics. Challenges include simulator parameter mismatch, sensor noise modeling, real-time constraints, and non-linear vehicle dynamics that are not fully captured in simulation.
Conclusions
The findings suggest that it is feasible to train models in a high-fidelity simulator such as CARLA and use a low-fidelity simulator to estimate real- world performance, thereby providing an approximation of the Sim-to-Real gap. However, results obtained in the intermediate simulator are not sufficiently reliable to eliminate the need for real-world testing. Training in a low-fidelity simulator like Duckietown and evaluating in CARLA proved to be much less effective. This indicates that the proposed method is well-suited for high-to-low fidelity trans- fer like discussed above, but not the reverse. Future work should look at broadening this methodology by incorporating multiple training algorithms, simulators and environments.
Project Report
Looking for similar projects?
Check out the following works on sim-to-real with Duckietown:
Duckietown is a modular, customizable platform for robotics and artificial intelligence education, enabling hands-on learning and real-world experimentation with autonomous systems.
Designed for teaching, learning, and research, Duckietown supports the full spectrum of autonomy development, from foundational computer science and robotics concepts to advanced AI and self-driving systems research.
These spotlight projects are shared to demonstrate how Duckietown bridges theory and practice in robotics and AI, empowering students to apply machine learning and autonomy techniques to physical robots while building practical skills valued in academic research and industry.
Saif Chaudry, Computer Science student at the College of Charleston, South Carolina, tells us about his experience learning robot autonomy with Duckiedrones.
Charleston, USA, November 2025: Saif Chaudry, junior majoring in Computer Science with a minor in Data Science at the College of Charleston, South Carolina, talks to us about his experience learning robot autonomy using Duckiedrones and developing an autonomous inventory system.
Learning robot autonomy at the College of Charleston
Thank you for your time and for being here. Could you please introduce yourself and tell us what you do?
Sure. My name is Saif, and I currently attend the College of Charleston in South Carolina, USA. I’m in the Honors College and I’m a junior majoring in Computer Science, with a minor in Data Science.
I started doing research at the college’s Drone Lab in the summer of 2024. Back then, we worked with DJI drones, mainly the DJI Tello and other models. It was a great hands-on experience learning robot autonomy and how to make drones scan barcodes and navigate autonomously.
This past summer, though, we switched over to the Duckiedrone model DD24-B (review DD24-B Duckiedrone documentation, or get a DD24-B), which turned out to be a great experience. It was intuitive to use and worked really well for our research.
That’s great. You already mentioned how you got involved with Duckietown and the Duckiedrones. Was there a specific reason you switched to them?
When we started with the DJI Tello drone, it was good for learning robot autonomy at a basic level. Later, we moved to more advanced models like the DJI Mavic Air 2 and the DJI Mini 3 Pro. But we ran into issues, the documentation was mostly in Chinese, and the SDKs were outdated, which made development difficult.
One of my professors, Dr. Mia Y. Wang, had another student who recommended the Duckiedrone. He thought it was a cool product to learn about robot autonomy, so Dr. Wang ordered a few units. That’s how we started using them this past summer.
And what was your experience like with the Duckiedrone? You mentioned it was easy to use, did you manage to achieve your project goals?
Our goal this summer was to develop an autonomous inventory system using drones. I worked on the project with my research partner, Samuel Eubank. Sammy built the drone physically while I worked remotely on the software side.
I set up the SD card, connected it to the internet, and got it communicating with my computer. We had some issues with the flight and infrared sensors, but I was able to fix them. Eventually, the drone started flying properly.
Now, this semester, we’re continuing the project, specifically focusing on getting the drone to scan barcodes.
Did you find the available Duckietown documentation helpful?
Yes, definitely. The Duckiedrone DD24 (daffy) documentation was very straightforward, it clearly explained how to get the drone connected to the internet and the computer, and the terminal commands were well documented.
I also joined the Duckietown Slack community and the Stack Overflow discussions. The community is very active, and it really helped me learn more about robot autonomy and troubleshoot issues. I even saw students from other universities helping each other out.
That’s great to hear. What are your next steps with this project?
We’re continuing the autonomous inventory project this semester. We had some problems with the college Wi-Fi, there were firewalls blocking access to the Raspberry Pi on the drone. But we managed to solve that using a VPN.
Now we’re working on another issue: the drone doesn’t fly high enough off the ground. We think it’s related to the maximum throttle settings, and we’re getting help from people on Slack to fix it. That’s our next goal.
I joined the Duckietown community and the Duckietown Archives. The community is very active, and it really helped me troubleshoot issues. I even saw students from other universities helping each other out.
That sounds exciting. Do you want to add anything about your future goals?
I’ve always been passionate about learning robot autonomy, especially self-driving cars. I find what companies like Waymo and Tesla are doing fascinating.
This autonomous inventory project is helping me learn how to make systems navigate autonomously, from point A to point B, planning paths, and operating indoors. In the future, I’d love to work in the field of autonomous systems and help develop technologies that make things more self-sufficient.
Learn more about Duckietown
Duckietown enables state-of-the-art robotics and AI learning experiences.
It is designed to help teach, learn, and do research: from exploring the fundamentals of computer science and automation to pushing the boundaries of human knowledge.
Tor Vergata University and Duckietown deliver hands-on control systems workshop at EU Maker Faire Rome 2025
Tor Vergata University, Rome, Italy, delivered a hands-on educational workshop on control systems at the European Maker Faire 2025 that took place in Rome, Oct. 17-19, 2025, in partnership with Duckietown.
Hands-on workshop: Introduction to automatic control with self-driving cars
Tor Vergata University, Rome’s second University, in partnership with Duckietown, has delivered a workshop titled “Introduction to Automatic Control with Self-Driving Duckiebots” in occasion of the EU Maker Faire in Rome, which hosted nearly 50000 visitors over the span of three days.
The objective of the workshop was to introduce participants to the fundamental principles of control system engineering and vehicle autonomy, by using real and simulated Duckiebots, and investigating the real-world impact of “details” such as controller tuning.
In this workshop, tuned for makers, educators, and learners, participants have:
Learnt what a robot is and what all robots have in common;
Understood the role of feedback and control systems in vehicle autonomy, as well as other everyday technologies;
Explored sensors, actuators, and the perception pipeline of Duckiebots;
Tuned a PID controller on simulated and physical Duckiebots.
Learning automatic control: Who, where and when
The workshop, led by Professor Mario Sassano from the Dipartimento di Ingegneria Civile e Informatica of the Tor Vergata University, took place in three sessions at the European Maker Faire 2025 in Rome. Shima Akbari, Giorgio Manca and Davide Iafrate provided precious assistance:
Friday, October 17, 2025: from 13:00 to 14:30 CET, Room 2 Make Lab (Area A)
Saturday, October 18, 2025: from 12.30 to 14:00 CET, Room 2 Make Lab (Area A)
Sunday, October 19, 2025: form 13:00 to 16:00, Room 8 (Area J)
Duckietown is a platform for creating and disseminating robotics and AI learning experiences.
It is modular, customizable and state-of-the-art, and designed to teach, learn, and do research. From exploring the fundamentals of computer science and automation to pushing the boundaries of knowledge, Duckietown evolves with the skills of the user.
Duckietown at the European Maker Faire 2025 – Rome
Duckietown went to the European Maker Faire 2025 in Rome, a place where makers, innovators, and creatives from all over the world showcase
projects in electronics, artificial intelligence, robotics, virtual and
augmented reality, gaming, music, art, education, and much more.
Maker Faire Rome – The European Edition is an annual event, open to visitors, dedicated to innovation, technology, and creativity. It brings together innovators, makers, and enthusiasts from all over Europe. In addition to showcasing projects and inventions, it offers workshops, conferences, and labs to acquire technical skills and stimulate collaboration.
It attracts students, startups, companies, and government entities, fostering idea exchange and technological evolution. It has become a reference point for the European innovators community, highlighting Italy as a center of innovation and creativity.
Duckietown went to Rome from the 17th to the 19th of October, to showcase our robots, meet enthusiasts and other exhibitors, and talk about robotics and robot autonomy. And what a ride it has been! Here below are some photos we took at the event.
Duckietown is a platform for creating and disseminating robotics and AI learning experiences.
It is modular, customizable and state-of-the-art, and designed to teach, learn, and do research. From exploring the fundamentals of computer science and automation to pushing the boundaries of knowledge, Duckietown evolves with the skills of the user.
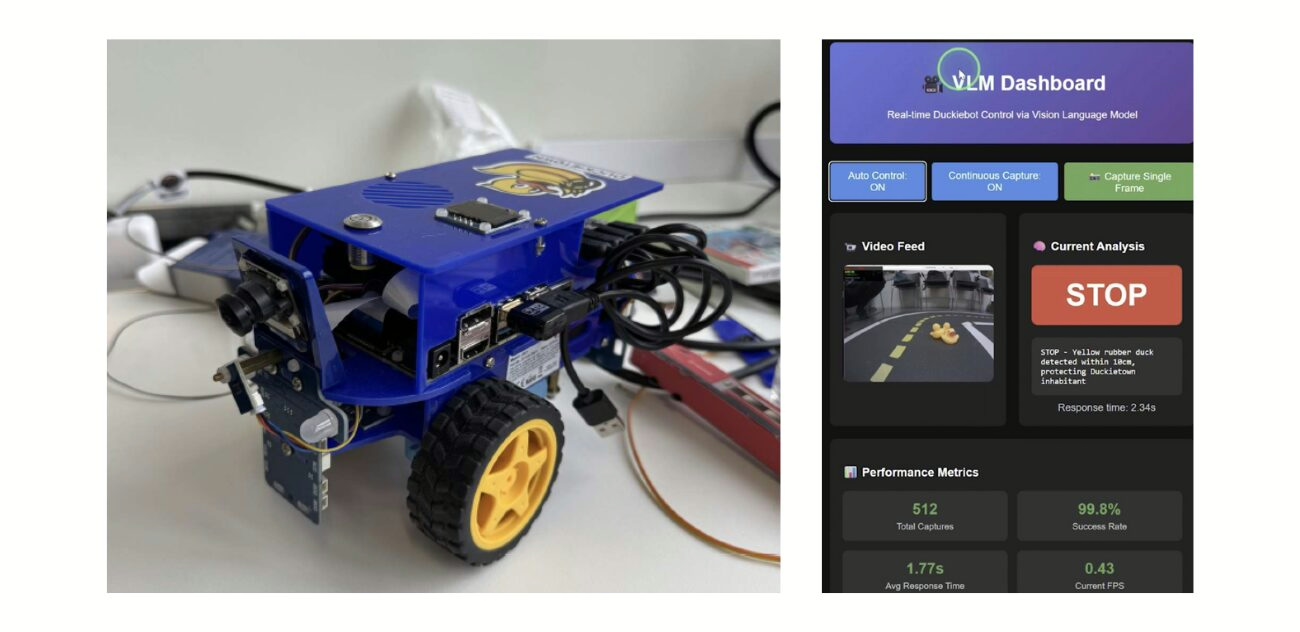
Dual-Mode Autonomous Navigation in Duckietown using VLM - the objectives
This project aims to implement an autonomous navigation system on the Duckiebot DB21J platform within Duckietown to enable vision-based control and decision-making using VLM (Vision Language Model).
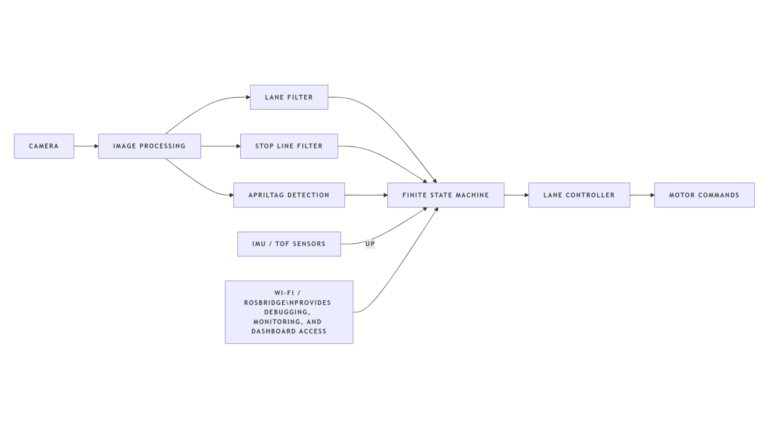
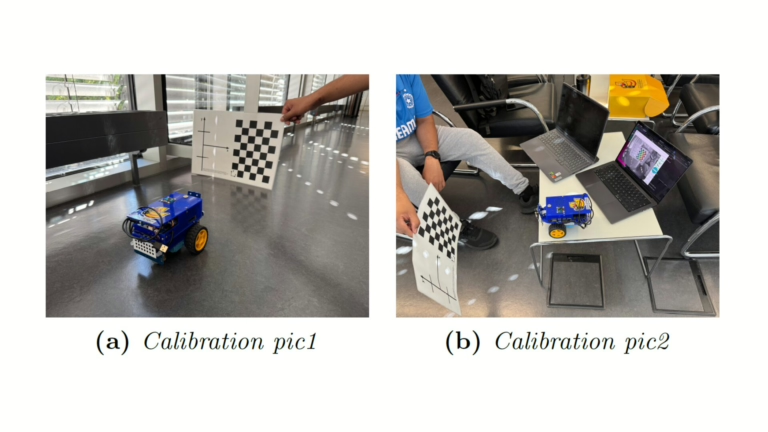
The system integrates calibrated camera intrinsics and extrinsics, motor gain and trim calibration, ROS nodes for perception and control, AprilTag-based semantic localization, stop line detection, lane filter for lateral pose estimation, finite state machine for state transitions, PID controllers for velocity and steering regulation, and quantized Qwen 2.5 models for multimodal inference on embedded hardware.
The work establishes a reproducible pipeline for benchmarking navigation algorithms, enabling analysis of trade-offs between model size, inference latency, memory limits, communication overhead, and control cycle timing in real-time robotic systems.
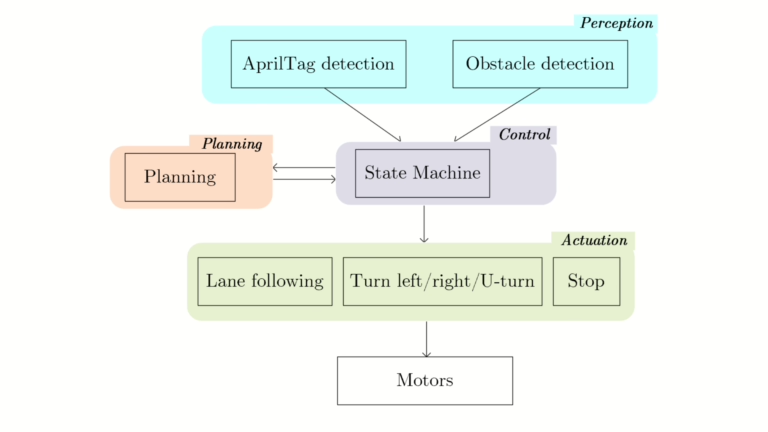
The method integrates calibrated camera intrinsics and extrinsics for distortion correction and frame alignment, motor gain and trim calibration for odometry consistency, and ROS-based perception nodes for lane filtering, stop line detection, obstacle recognition, and AprilTag-based pose estimation. Control nodes implement PID regulators for velocity and steering, parameterized turning primitives, and synchronized execution through a finite state machine that coordinates lane following, intersection stopping, turning maneuvers, and recovery states. Sensor fusion combines camera streams, encoder feedback, and ToF measurements for robust decision inputs.
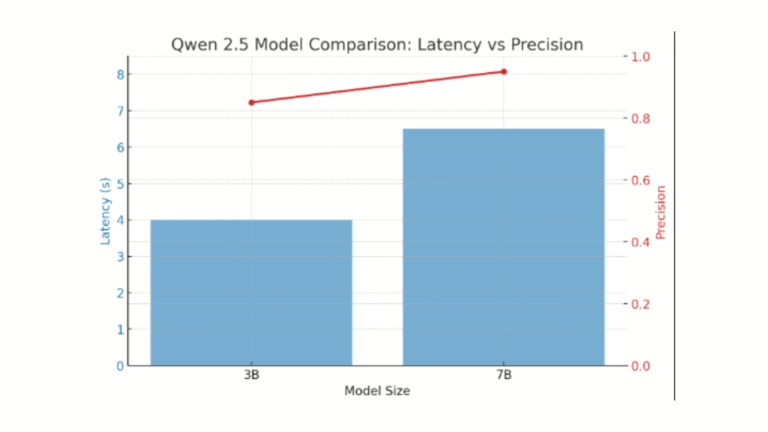
Quantized Qwen 2.5 vision-language models were deployed with llama.cpp, configured with reduced context window and batch size to match GPU memory limits. The models were evaluated for trajectory planning and visual reasoning tasks, with both 7B and 3B variants tested under quantization schemes. Integration required Docker containerization for portability and ROSBridge for monitoring and remote interaction.
Challenges included GPU memory capacity restricting larger model execution, inference latency exceeding 100 ms control cycle requirements, CUDA feature mismatches across builds, and instability in container runtimes on the NVIDIA Jetson Nano platform. These issues necessitated systematic parameter tuning of controllers, quantization of VLMs to GGUF formats, pruning strategies to reduce computation load, and hybrid offloading of visual reasoning to external compute nodes while maintaining low-level perception and control locally. Additional constraints involved balancing message-passing overhead in ROS, synchronization delays between perception and control nodes, and variability in inference reproducibility across different hardware builds.
Duckiebot DB21J Assembly
System Workflow Architecture
Camera Calibration
VLM Model Performance
Report and Presentation
Looking for similar projects?
Check out the following works on path planning with Duckietown:
Duckietown is a modular, customizable, and state-of-the-art platform for creating and disseminating robotics and AI learning experiences.
Duckietown is designed to teach, learn, and do research: from exploring the fundamentals of computer science and automation to pushing the boundaries of knowledge.
These spotlight projects are shared to exemplify Duckietown’s value for hands-on learning in robotics and AI, enabling students to apply theoretical concepts to practical challenges in autonomous robotics, boosting competence and job prospects.
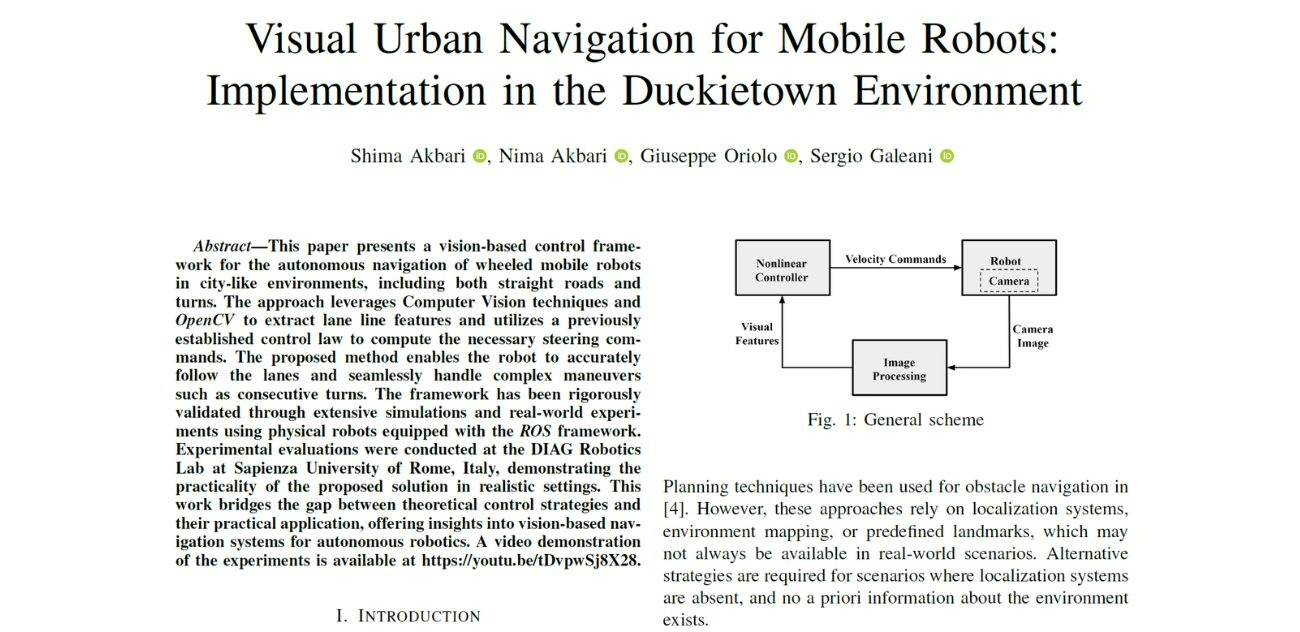
Title: Visual Urban Navigation for Mobile Robots: Implementation in the Duckietown Environment
Authors: Shima Akbari, Nima Akbari, Giuseppe Oriolo, Sergio Galeani
Institution: Università degli Studi di Roma Tor Vergata, Italy
Citation: S. Akbari, N. Akbari, G. Oriolo and S. Galeani, "Visual Urban Navigation for Mobile Robots: Implementation in the Duckietown Environment," 2025 International Conference on Control, Automation and Diagnosis (ICCAD), Barcelona, Spain, 2025, pp. 1-6, doi: 10.1109/ICCAD64771.2025.11099311.
Visual Control for Autonomous Navigation in Duckietown
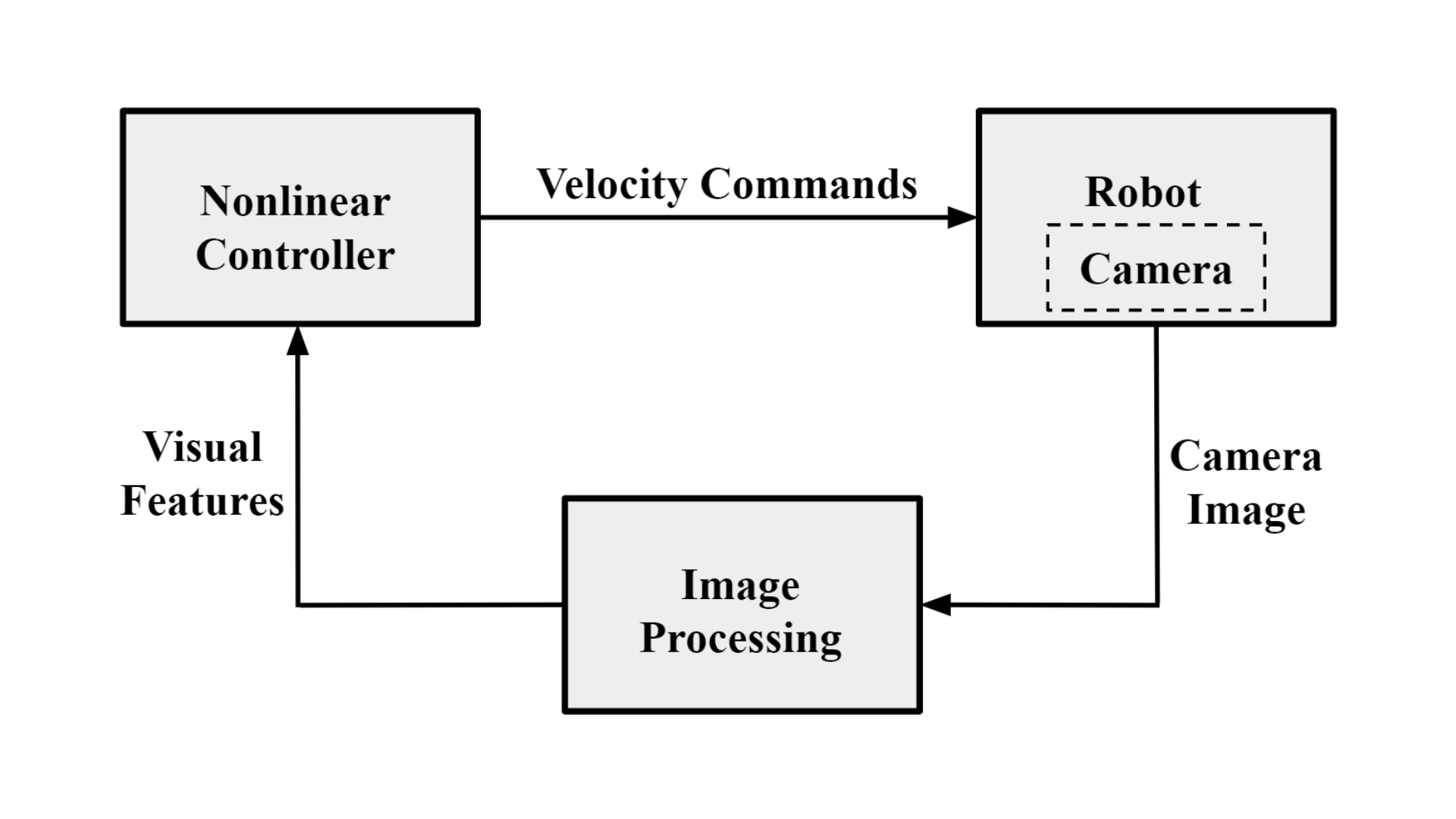
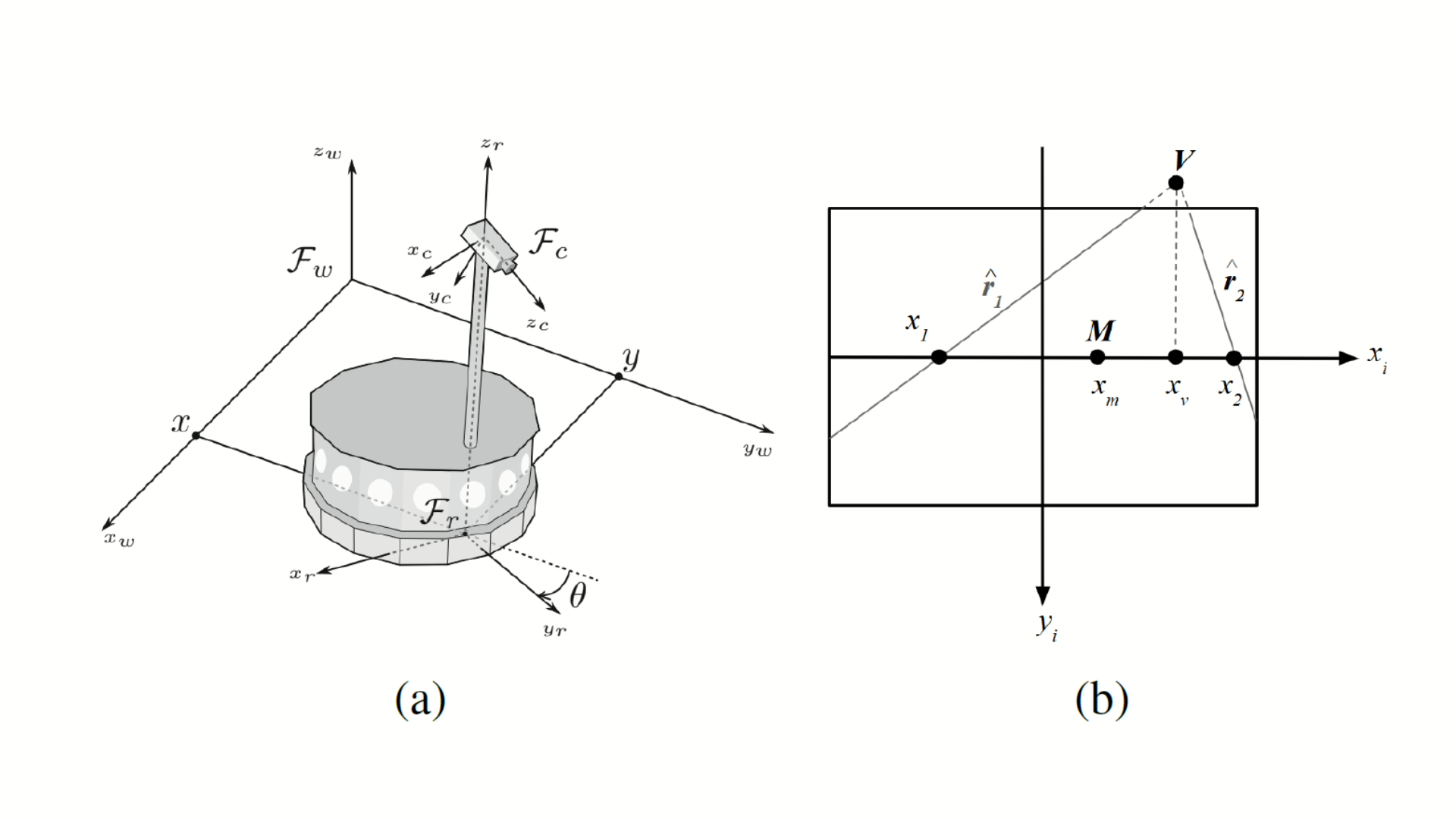
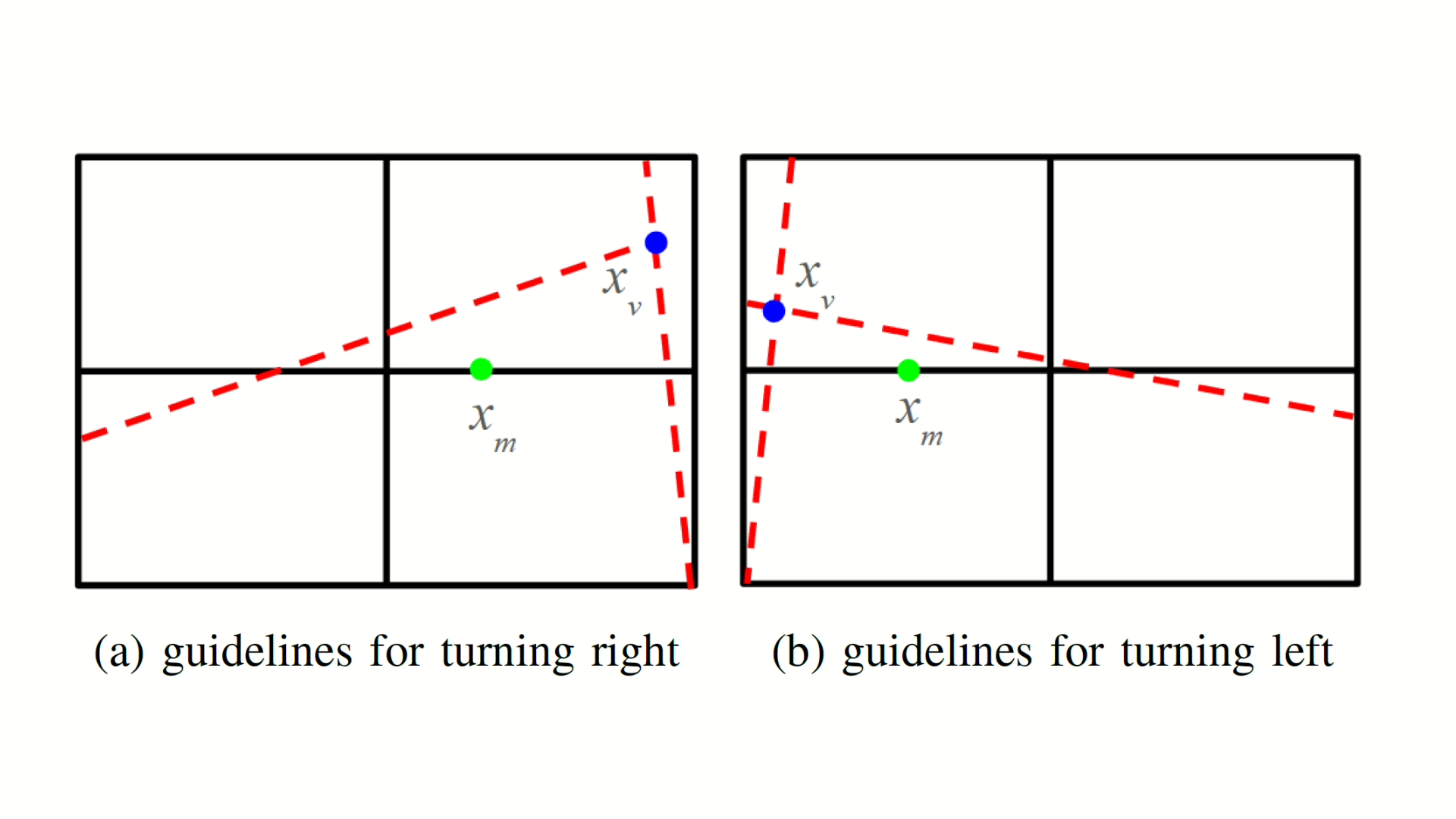
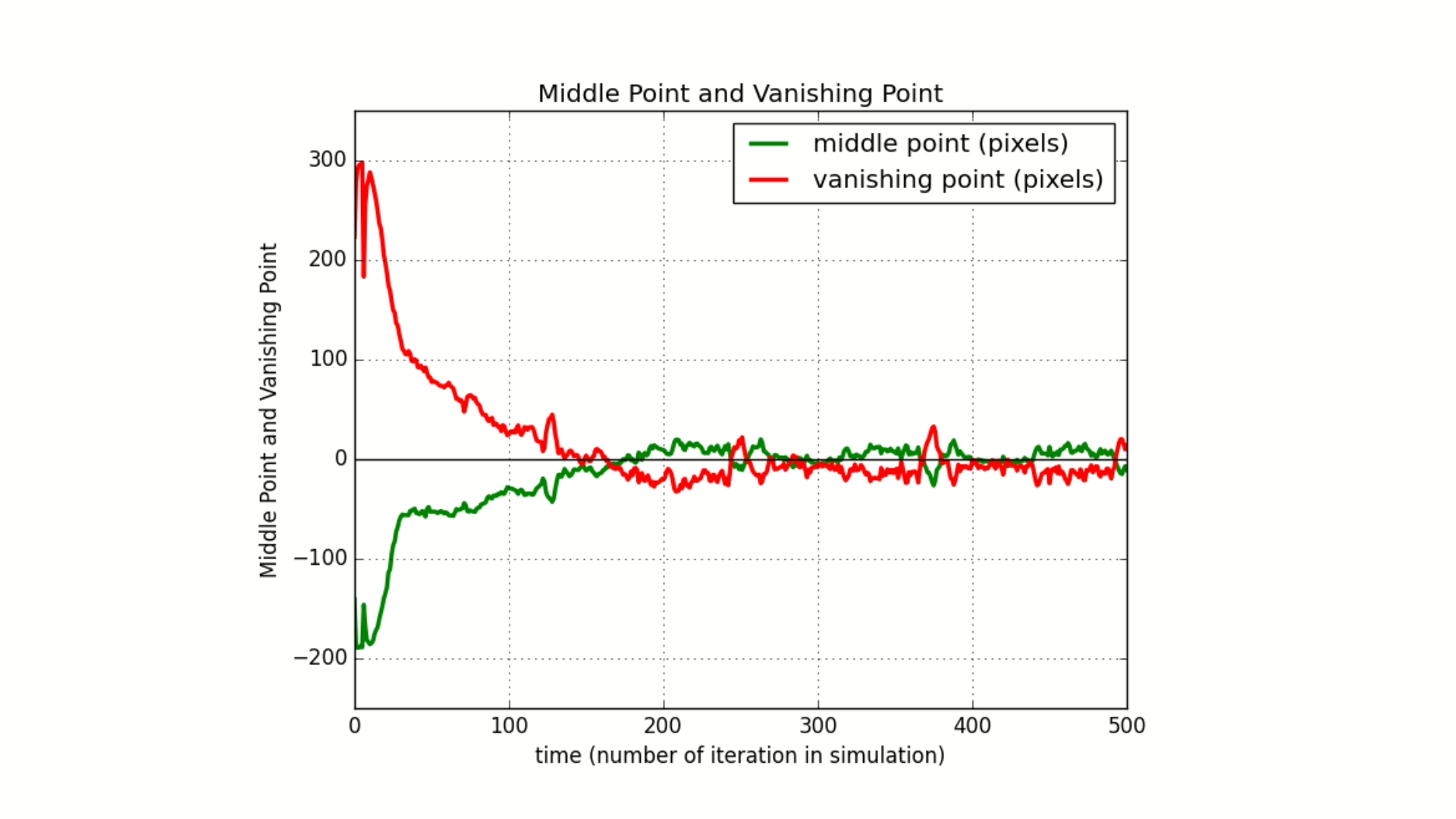
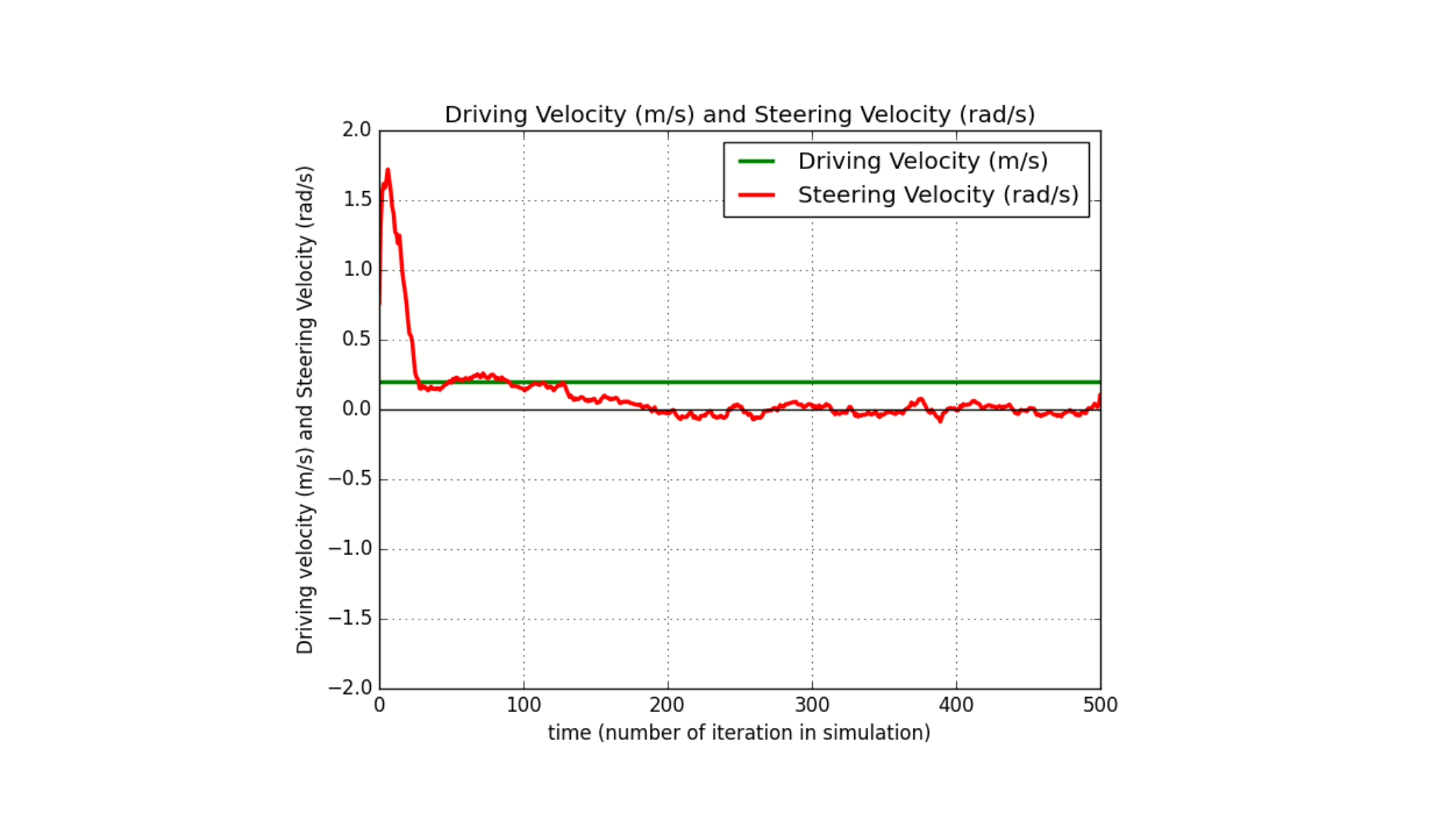
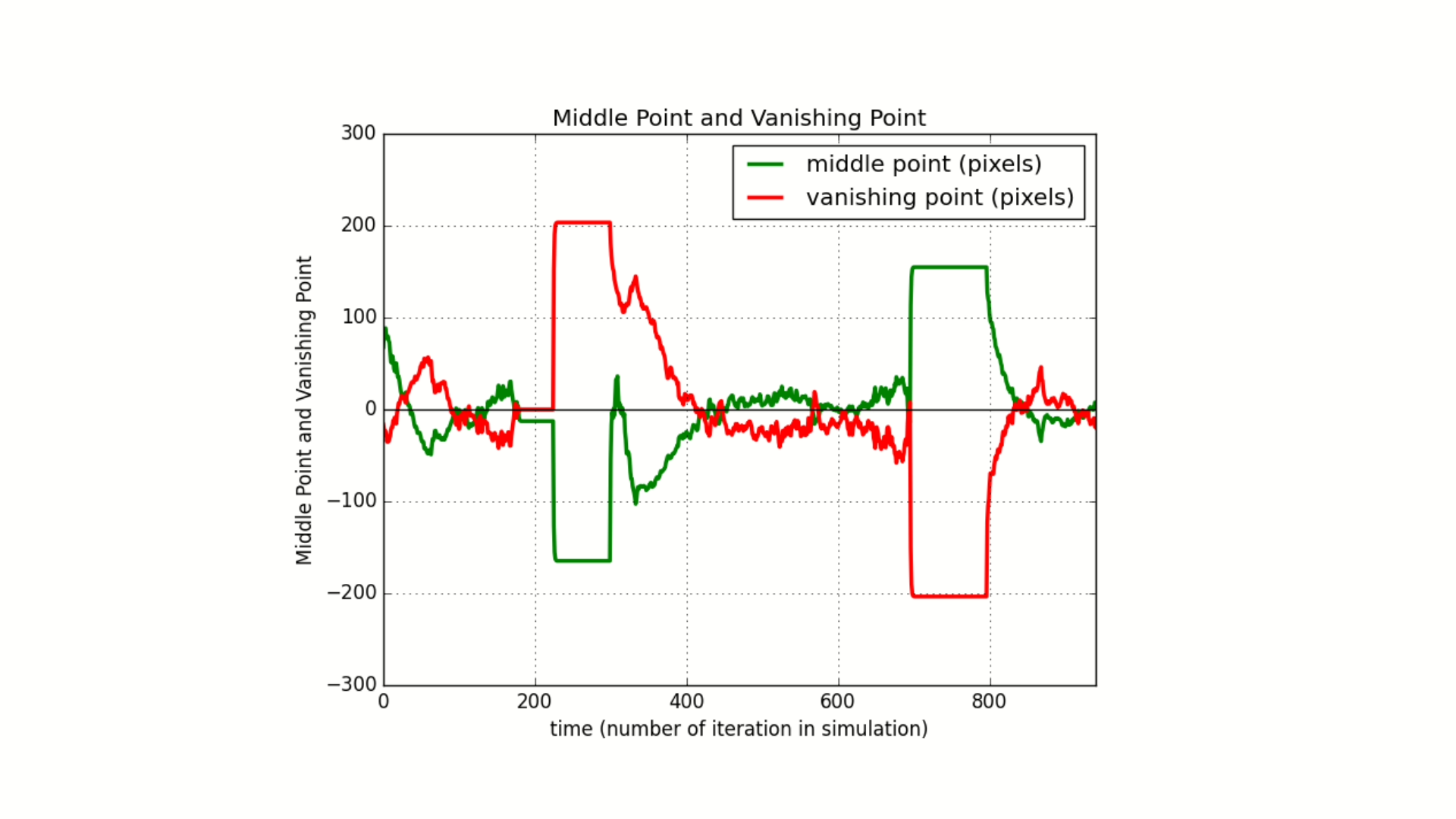
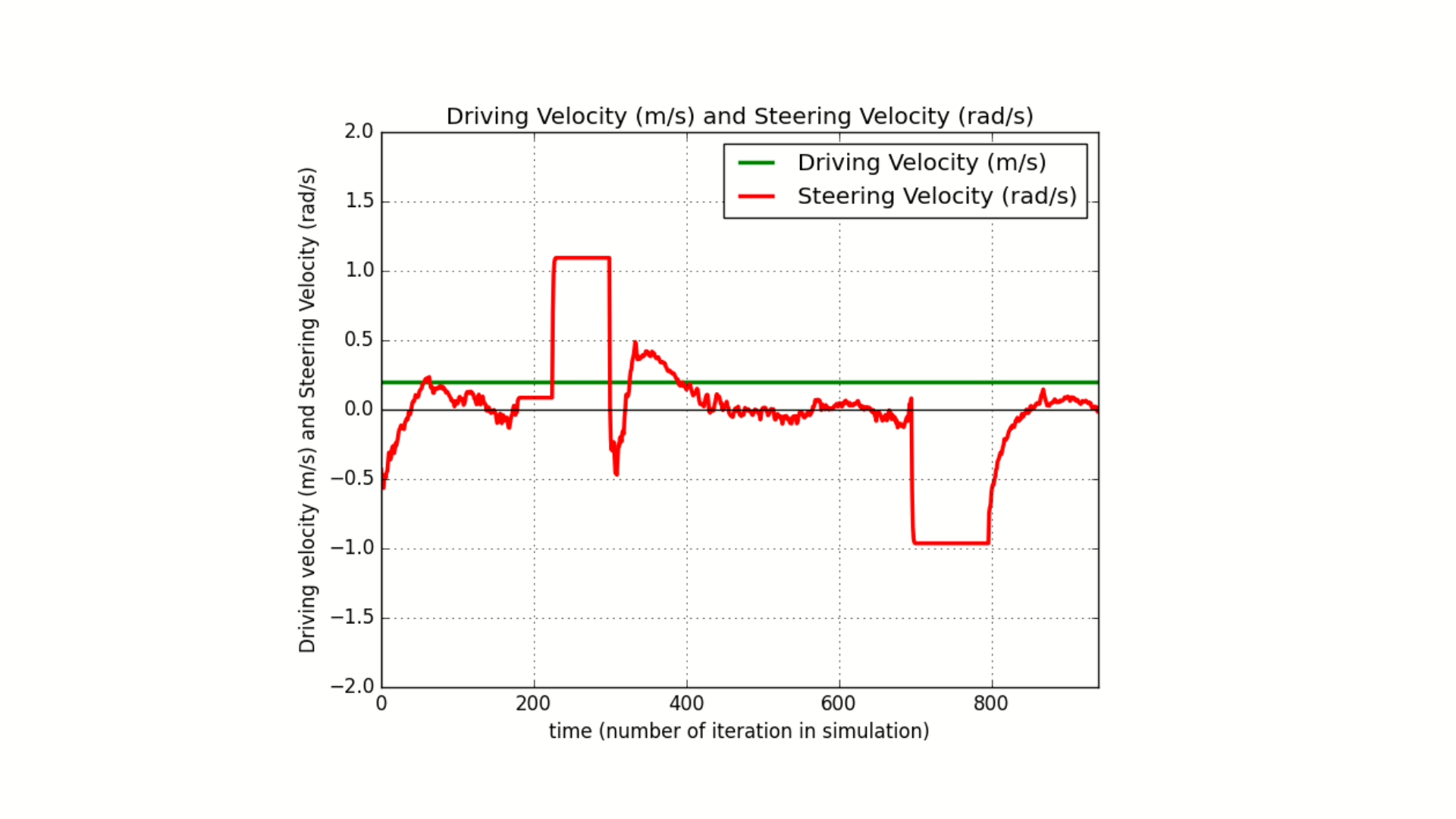
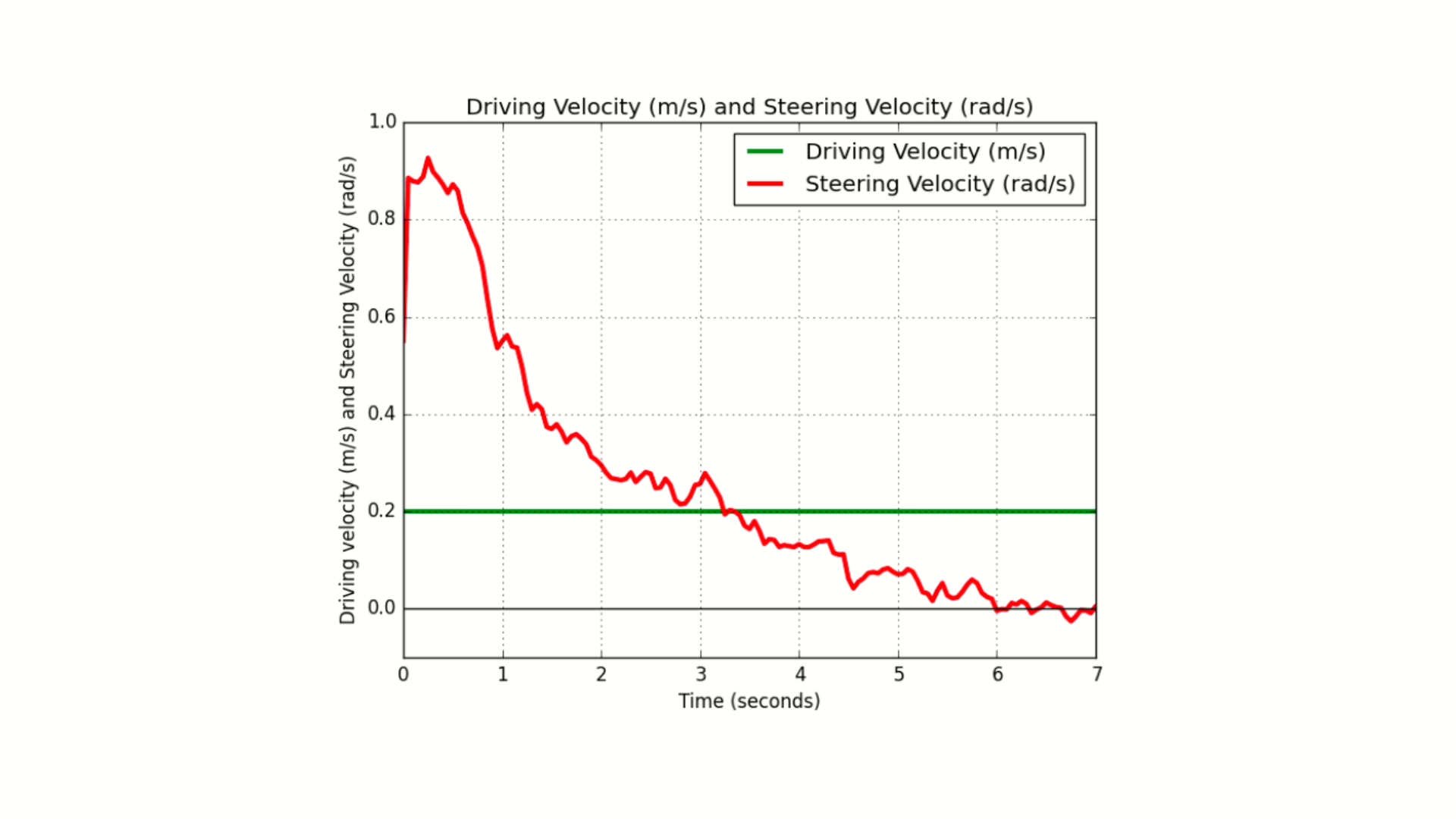
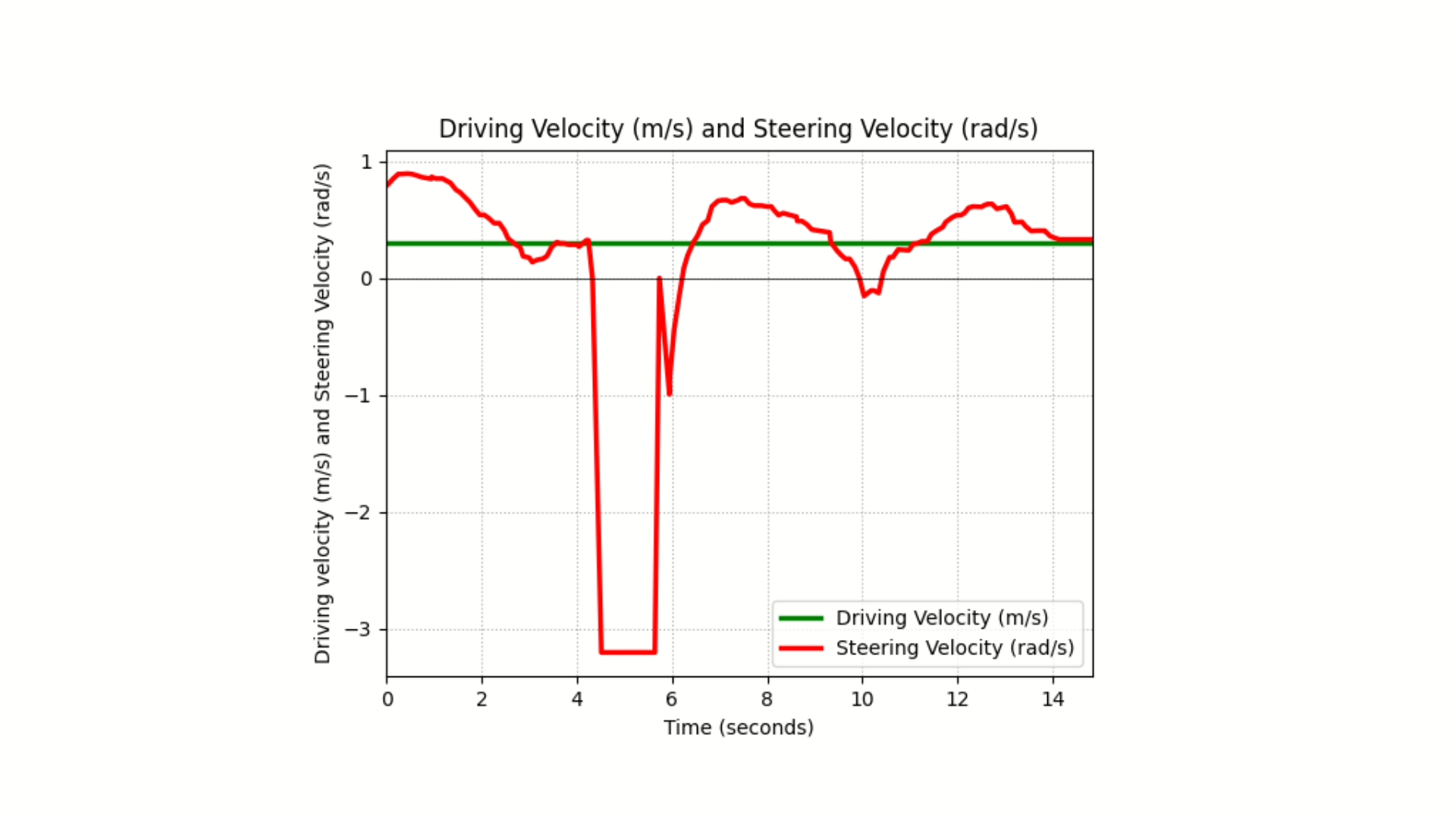
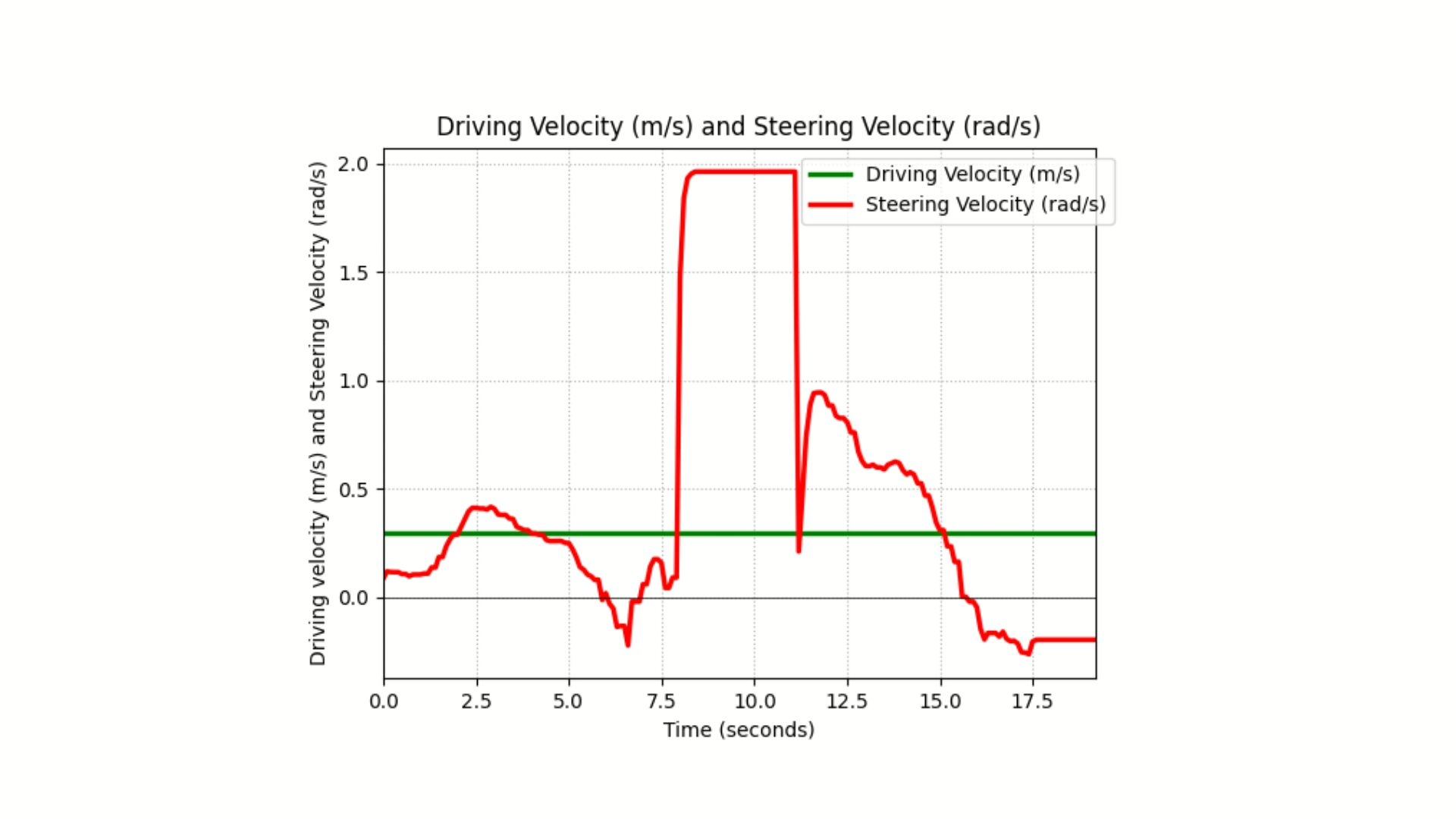
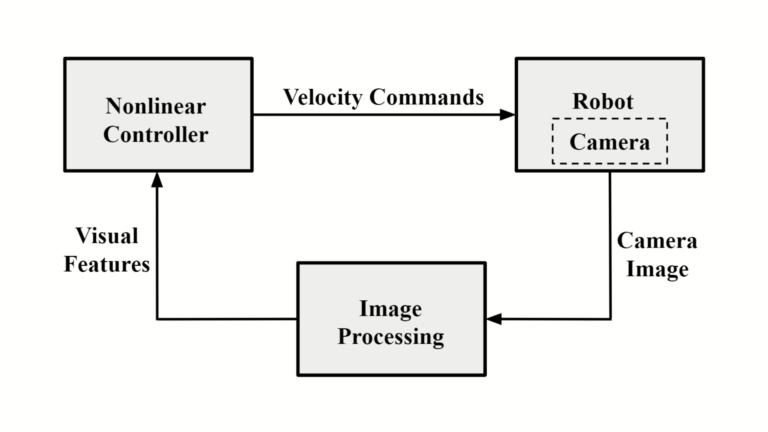
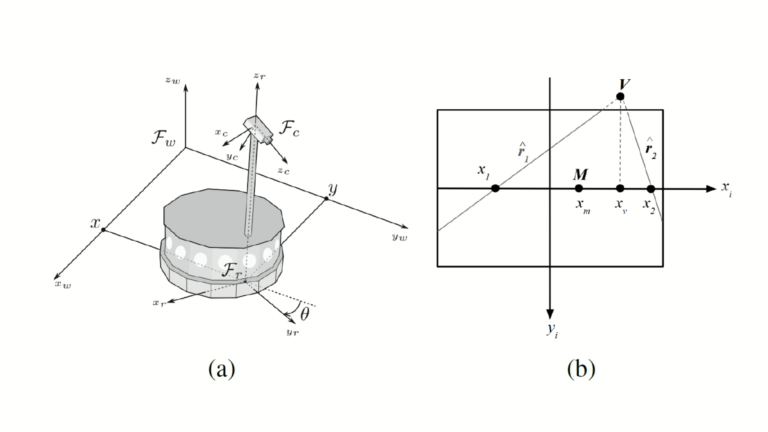
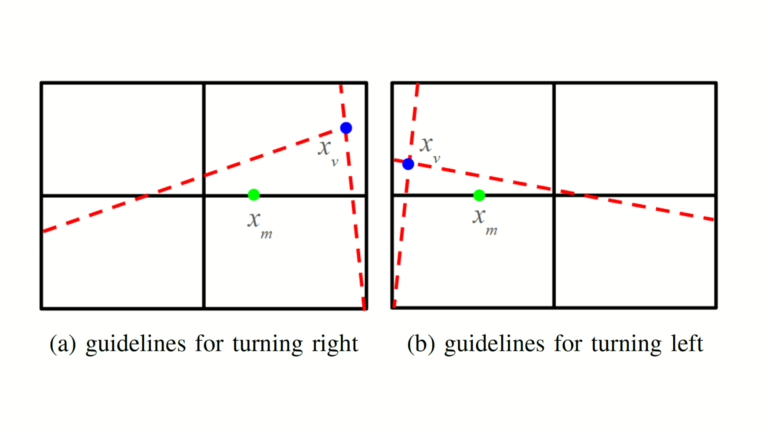
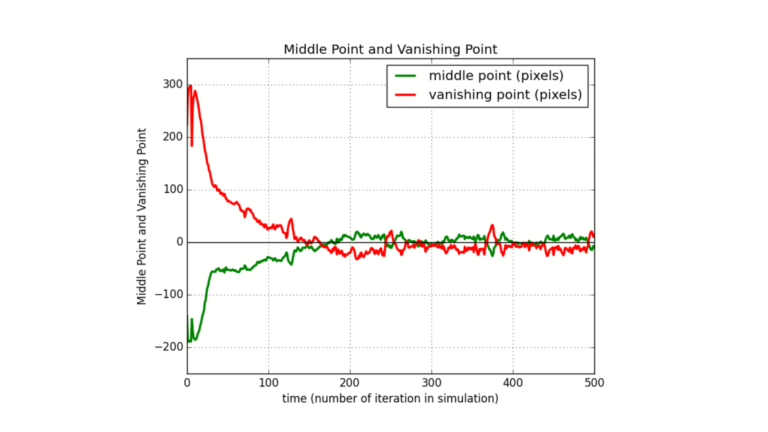
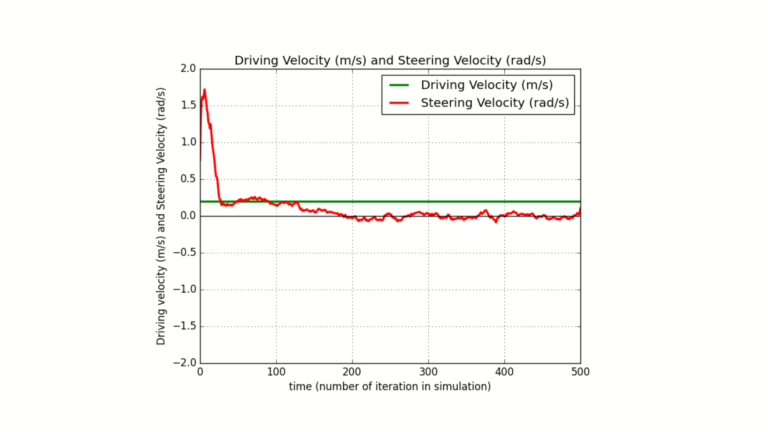
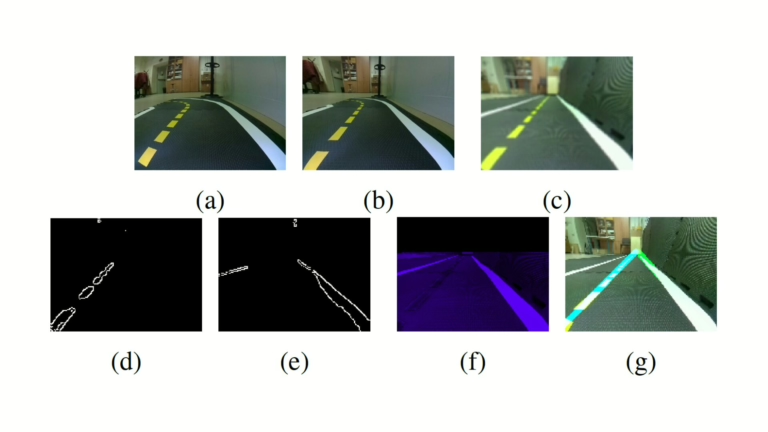
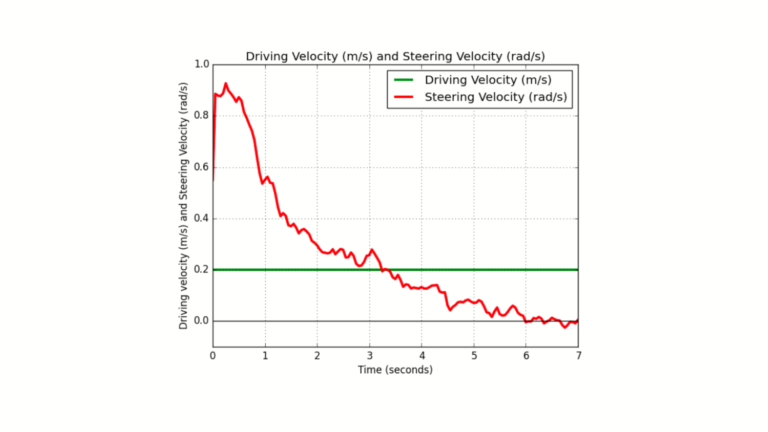
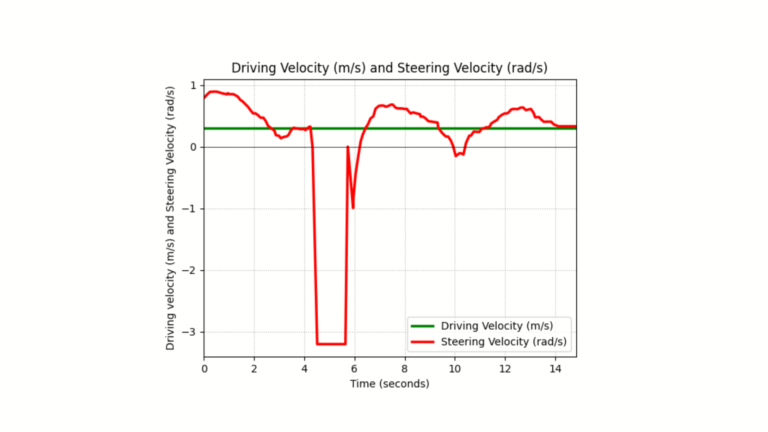
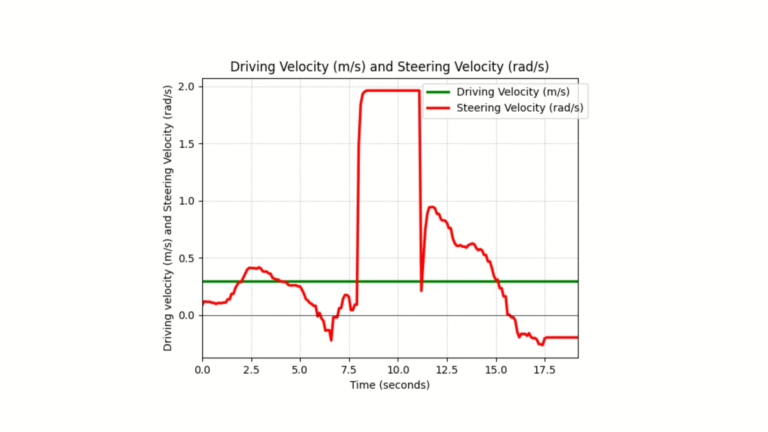
This research presents a visual control framework for in Duckietown using only onboard camera feedback for autonomous navigation. The system models the Duckiebot as a unicycle with constant driving velocity and uses steering velocity as the control input. Virtual guidelines are extracted from the lane boundaries to compute two visual features: the middle point and the vanishing point on the image plane.
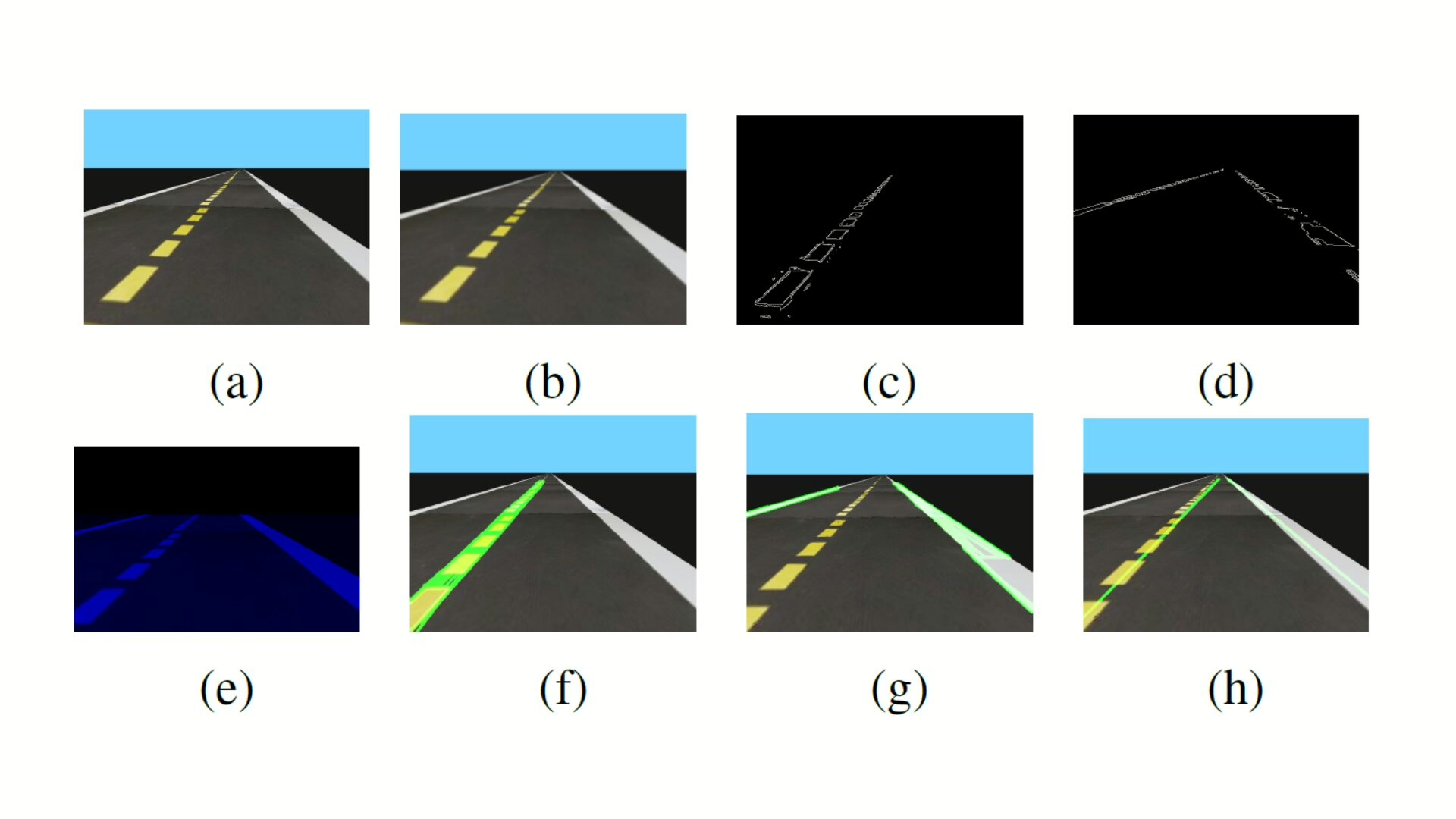
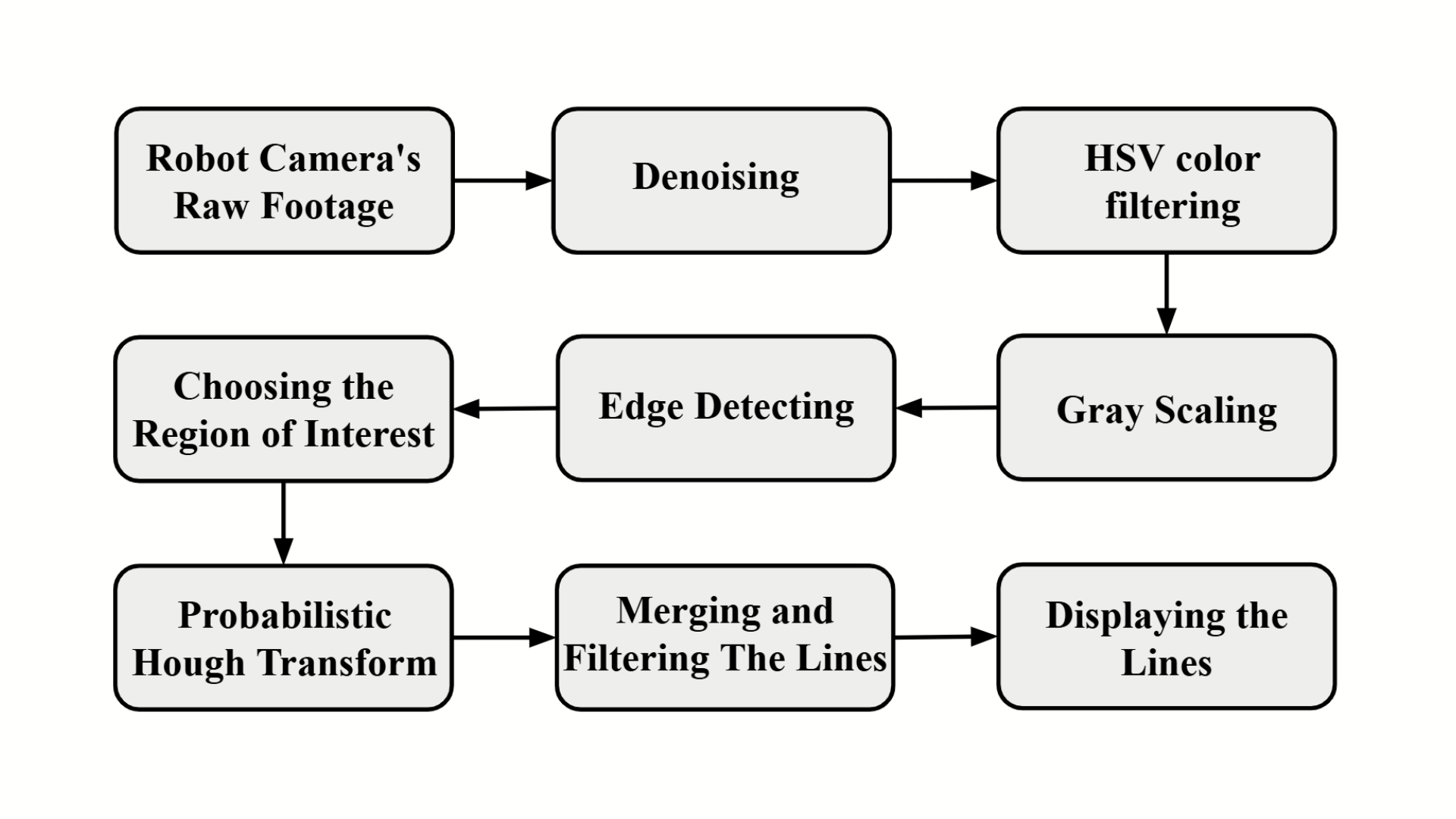
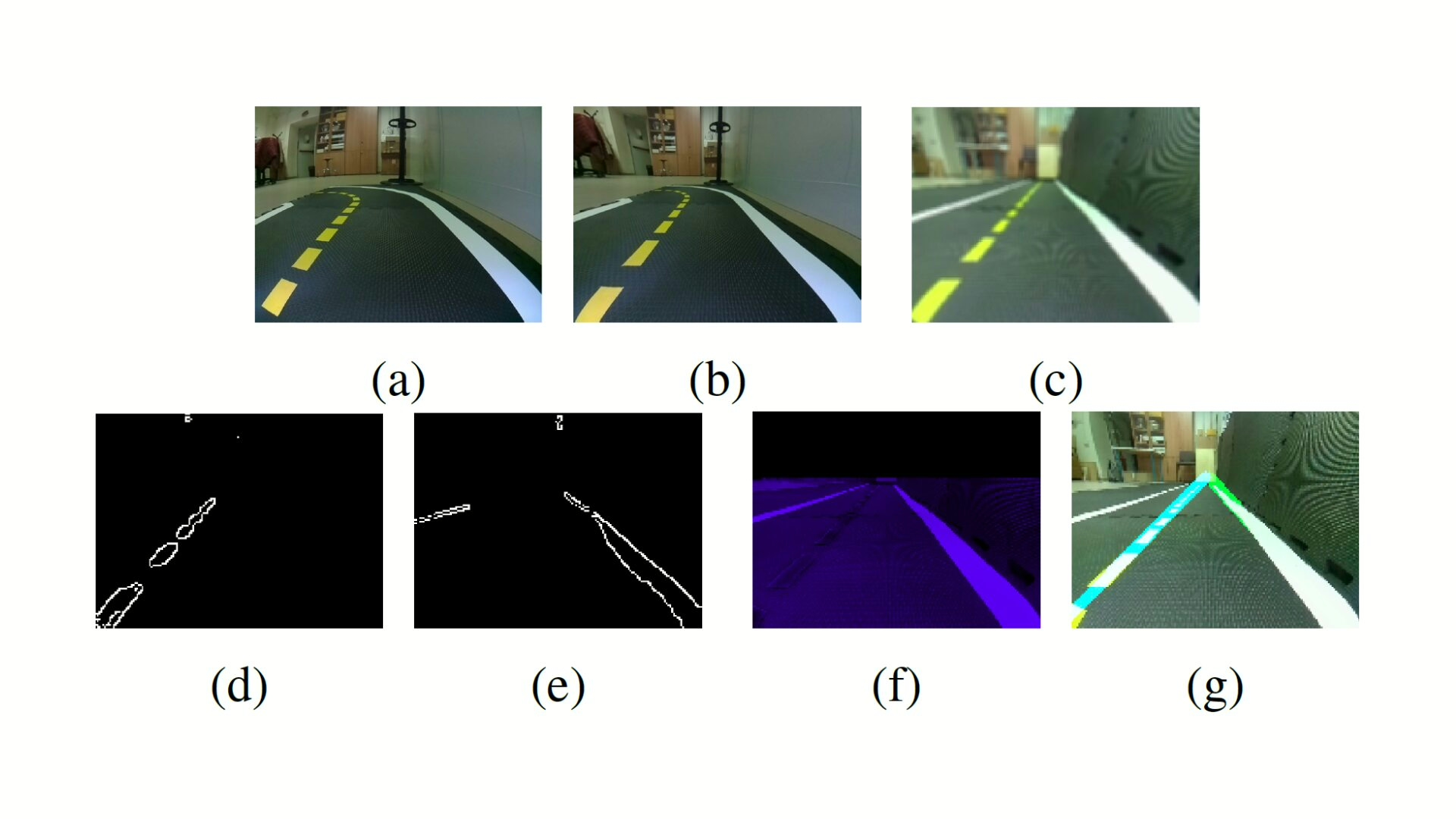
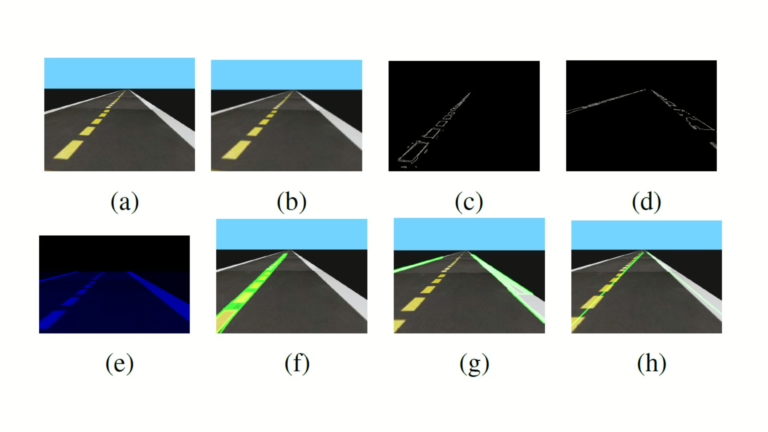
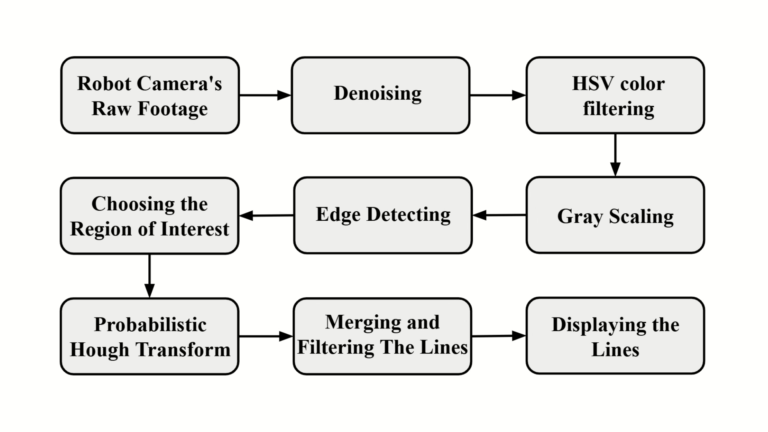
The controller drives these features to the image center using a mathematically derived control law. The visual features are obtained from the camera feed using a multi-stage image processing pipeline implemented in OpenCV. The pipeline includes frame denoising, grayscale conversion, edge detection using the Canny edge detection algorithm, region of interest masking, and line detection via the Probabilistic Hough Line Transform. This setup provides robust detection of the white and yellow lane markings under varying conditions.
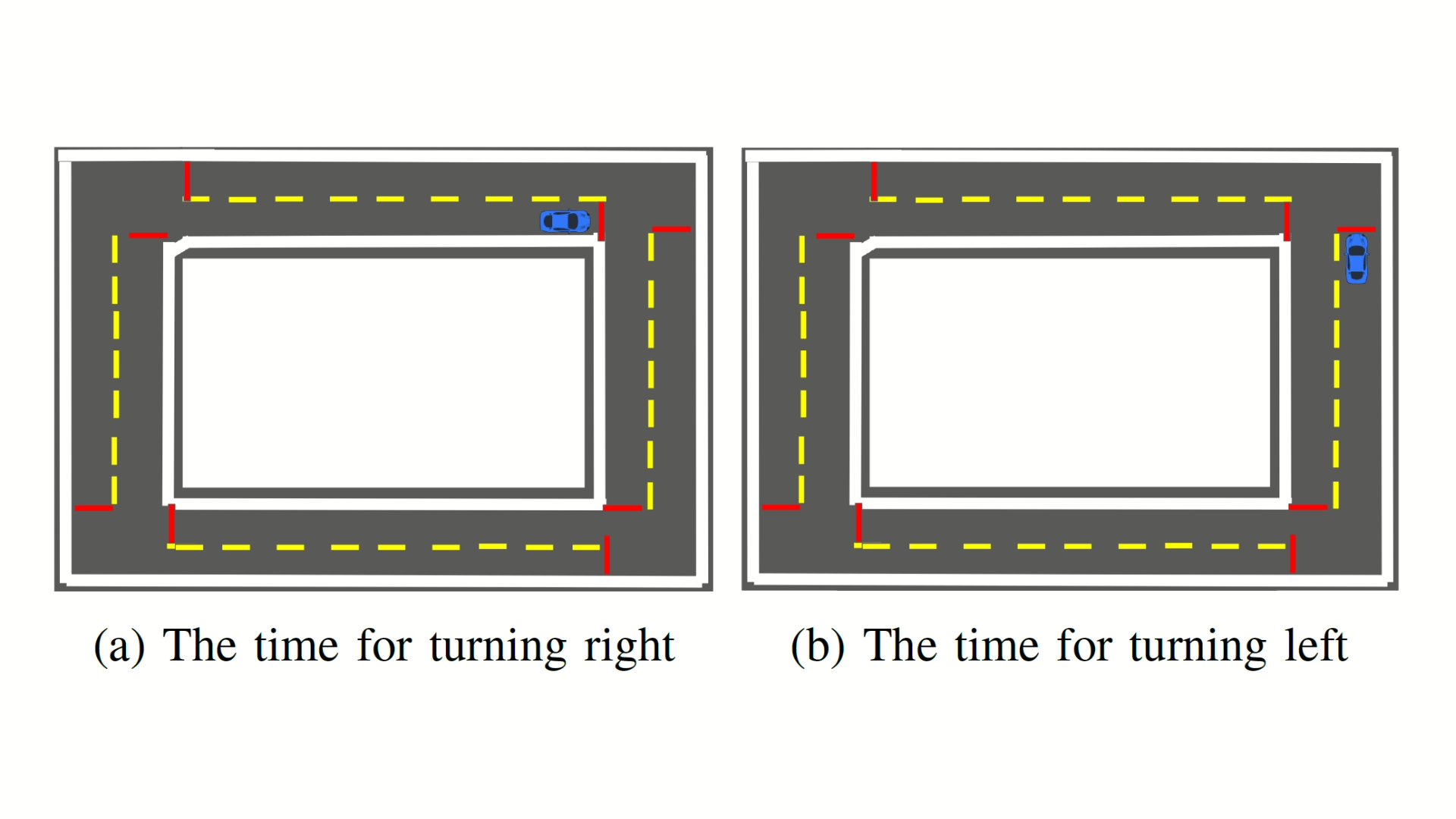
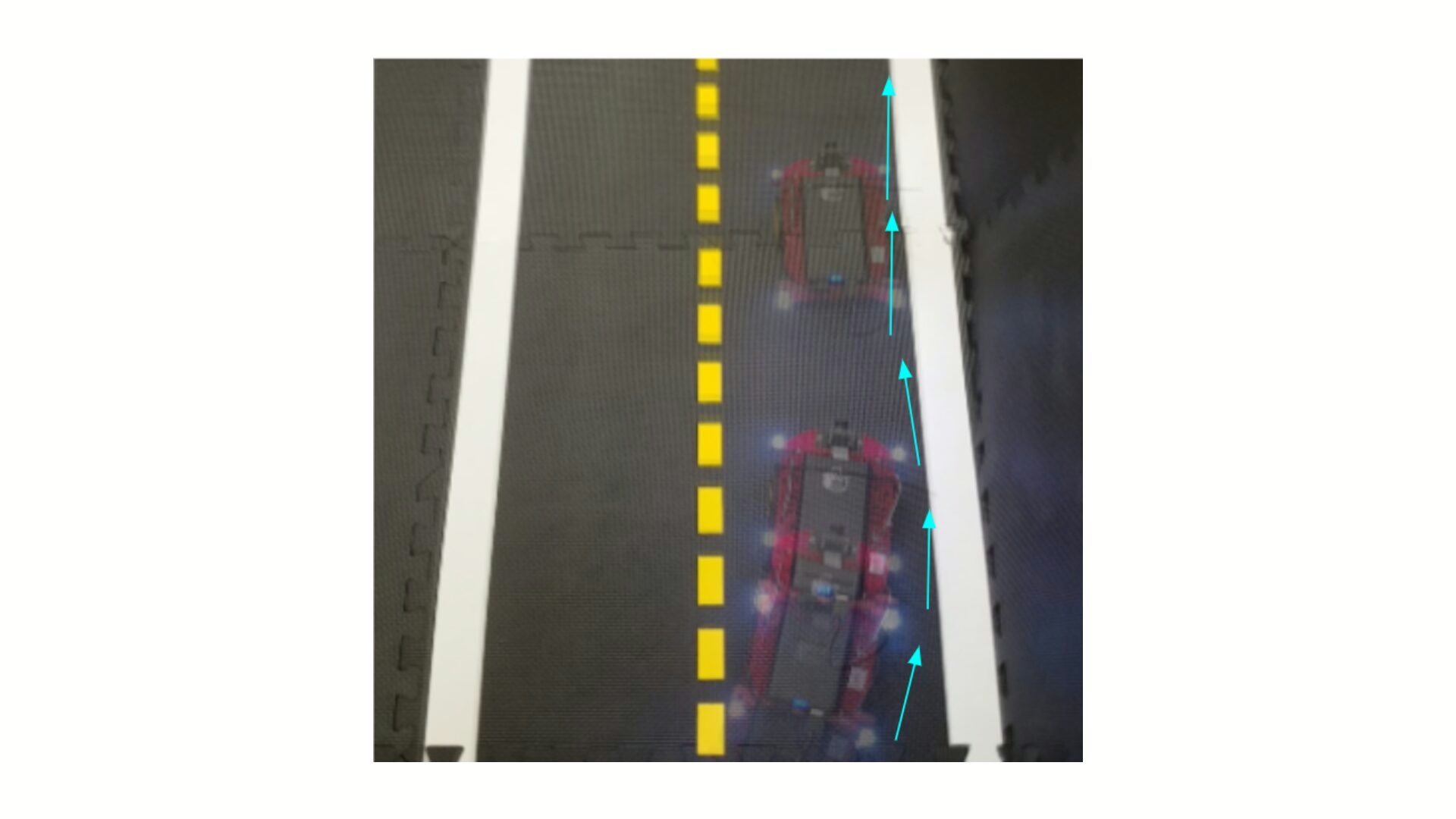
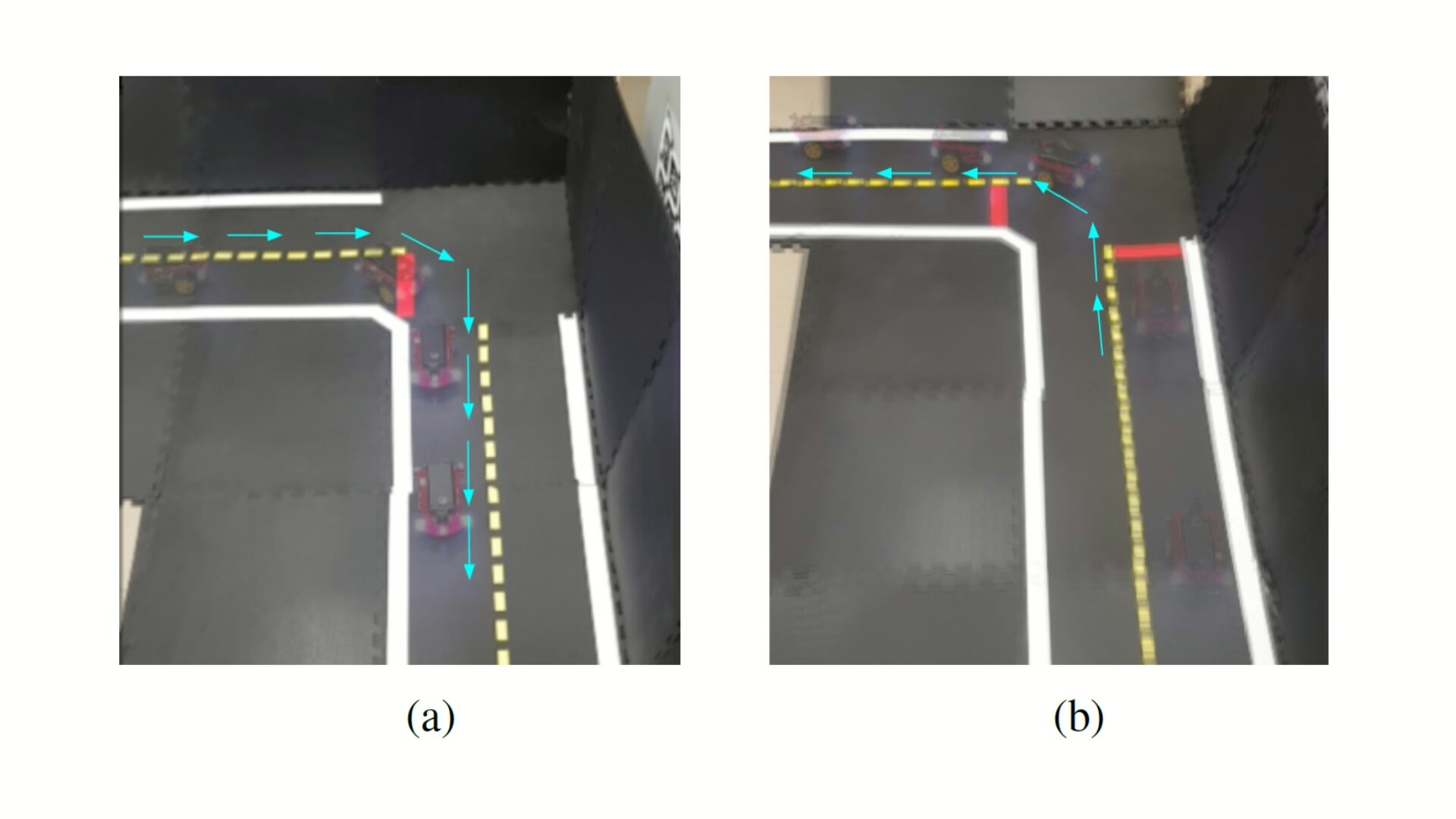
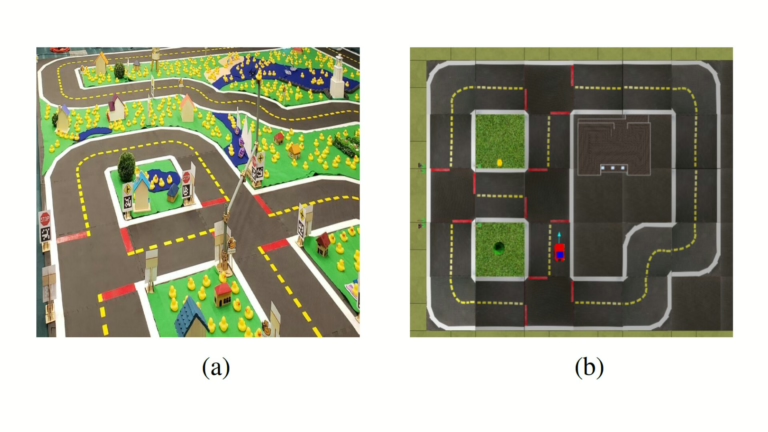
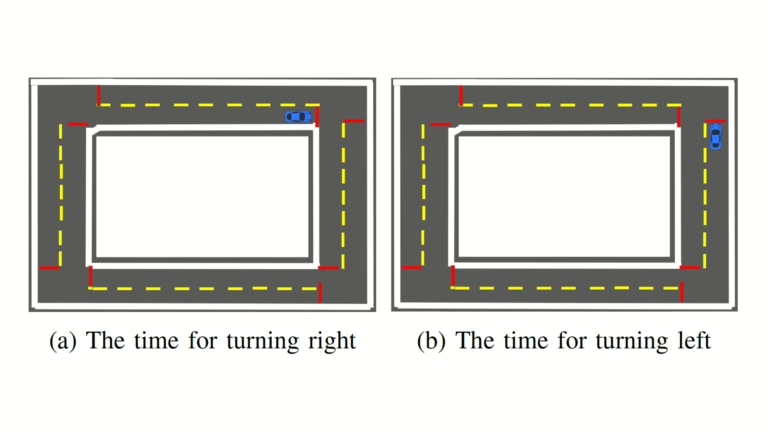
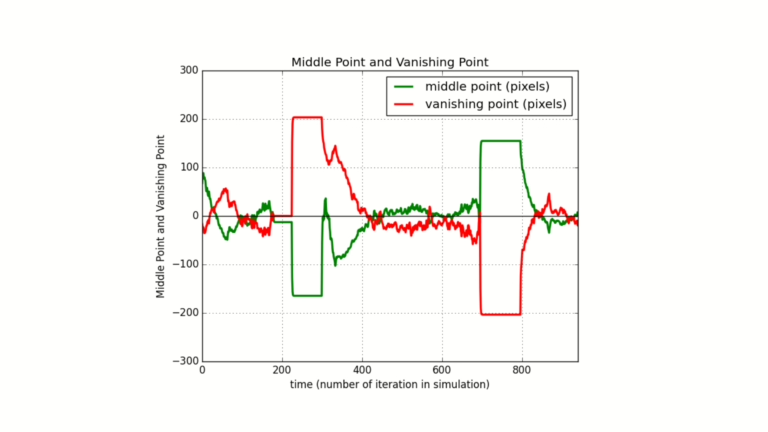
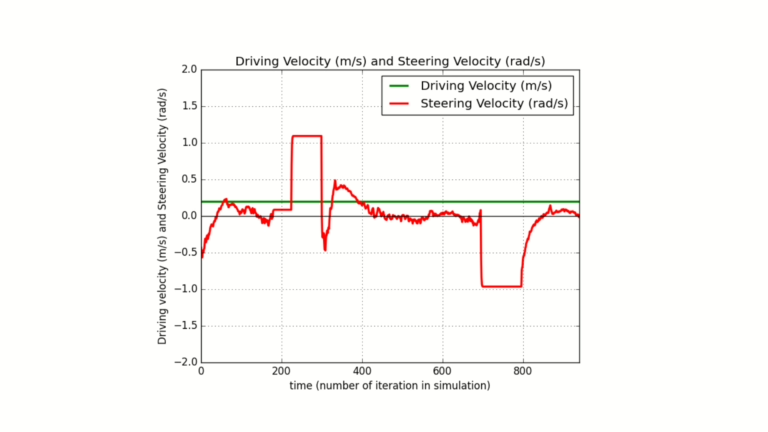
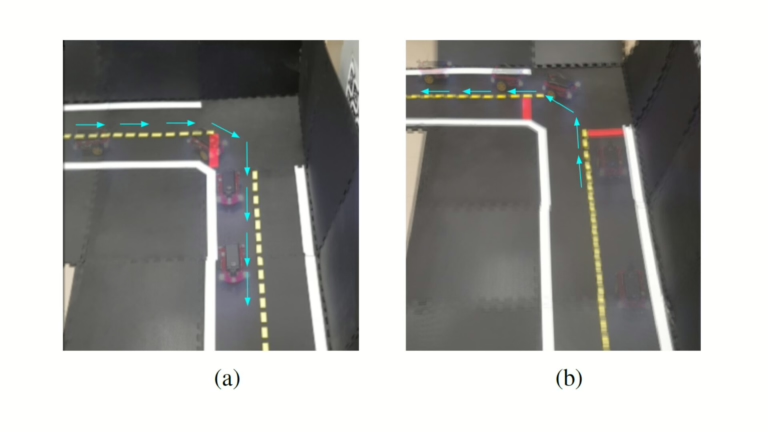
A scenario-driven transition system detects red lines marking intersections and activates artificial guidelines to execute controlled turns. The visual control implementation runs as a single ROS node following a publisher-subscriber architecture, deployed both in the Duckietown Simulator (gym) and in Duckietown.
Figure 1. General Scheme of Robot Navigation
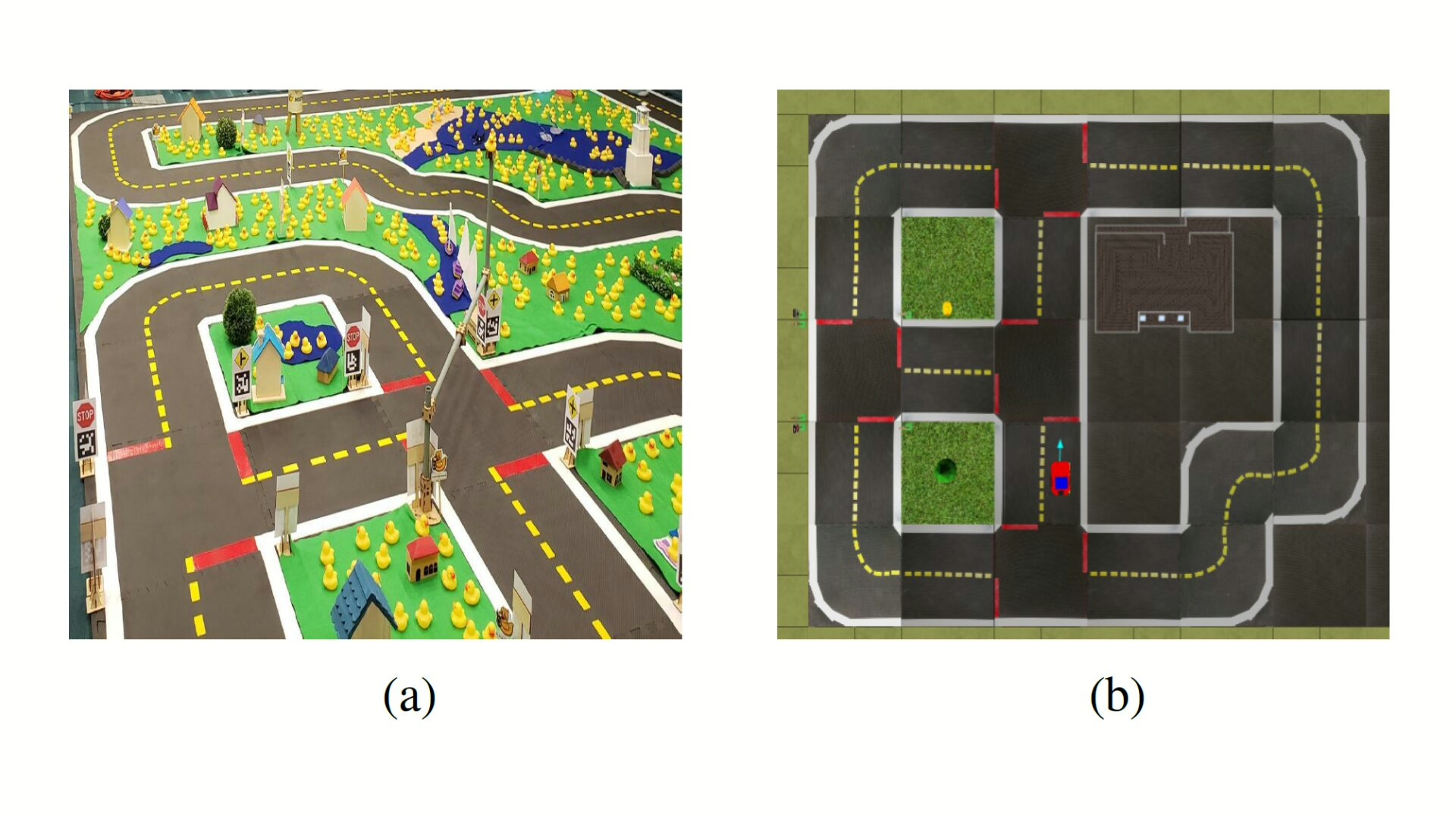
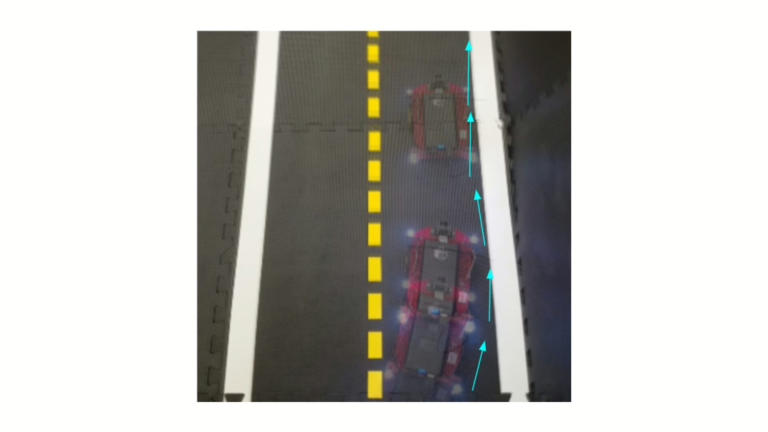
Figure 2. Duckietown Real vs Simulated Setup
Figure 3. Coordinate Frames and Virtual Guidelines
Highlights - Visual Control for Autonomous Navigation in Duckietown
Here is a visual tour of the implementation of visual control for autonomous navigation by the authors. For all the details, check out the full paper.
Abstract
Here is the abstract of the work, directly in the words of the authors:
This paper presents a vision-based control framework for the autonomous navigation of wheeled mobile robots in city-like environments, including both straight roads and turns. The approach leverages Computer Vision techniques and OpenCV to extract lane line features and utilizes a previously established control law to compute the necessary steering commands.
The proposed method enables the robot to accurately follow the lanes and seamlessly handle complex maneuvers such as consecutive turns. The framework has been rigorously validated through extensive simulations and real-world experiments using physical robots equipped with the ROS framework. Experimental evaluations were conducted at the DIAG Robotics Lab at Sapienza University of Rome, Italy, demonstrating the practicality of the proposed solution in realistic settings.
This work bridges the gap between theoretical control strategies and their practical application, offering insights into vision-based navigation systems for autonomous robotics. A video demonstration of the experiments is available at https://youtu.be/tDvpwSj8X28.
Conclusion - Visual Control for Autonomous Navigation in Duckietown
Here is the conclusion according to the authors of this paper:
This paper proposed a vision-based control framework for lane-following tasks in wheeled mobile robots, validated through both simulations and real-world experiments. The approach effectively maintains the robot position at the center of lanes and enables safe left and right turns by relying solely on visual feedback from onboard camera, without requiring external localization systems or pre-mapped environments.
The system’s modular design and simplicity allow for seamless integration with other robotic systems, making it versatile for diverse urban navigation scenarios. Future research will focus on enhancing the framework to handle complex scenarios, such as autonomous lane corrections, and incorporating obstacle detection and avoidance mechanisms for improved performance in dynamic, real-world environments.
These advancements will expand the applicability of the proposed method, confirming its potential as a robust solution for autonomous navigation.
Did this work spark your curiosity?
Check out the following works on vehicle autonomy with Duckietown:
Duckietown is a platform for creating and disseminating robotics and AI learning experiences.
It is modular, customizable and state-of-the-art, and designed to teach, learn, and do research. From exploring the fundamentals of computer science and automation to pushing the boundaries of knowledge, Duckietown evolves with the skills of the user.
The Duckietown platform has been evolving since its creation back at MIT in 2016. The main code base has undergone four major revisions, with the current release named daffy (d: fourth letter of the alphabet).
We are now happy to announce the new major Duckietown software release: ente!
Among the various meanings of this word in different languages, Ente is the German word for “duck”. We chose this name as a tribute of Duckietown to ETH Zürich, and the German-speaking part of Switzerland, for their influence on Duckietown’s evolution over the last years.
But why did we need ente?
We built ente to streamline the code base, especially the autonomy code running on Duckietown robots, make the development process quicker and more efficient, and to prime the platform for easier updates, maintenance, and future improvements.
The Duckietown codebase had evolved, historically, from a classroom experience, resulting in a improvable autonomy stack. The ente initiative grew to include infrastructural upgrades, e.g., the introduction of the Duckietown Postal System (DTPS), to better support reproducible robotics learning experiences in light of new developments in the fields of robotics and AI, e.g., the release of ROS2.
What is new in ente?
Here is a non-exhaustive list of changes introduced by ente into Duckietown.
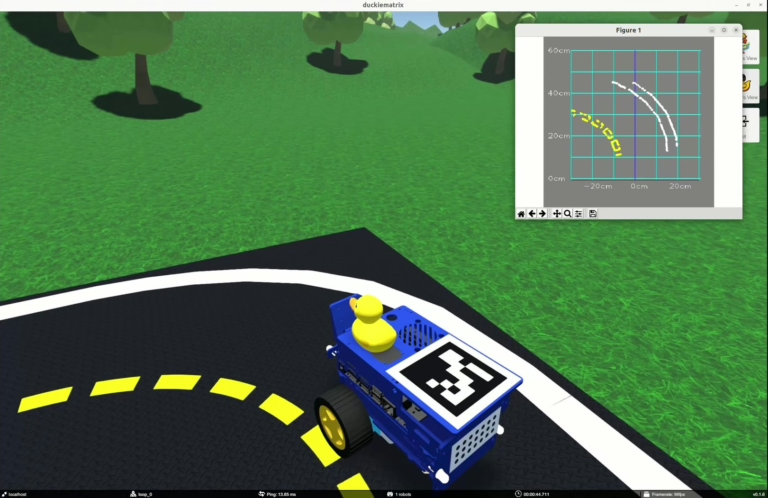
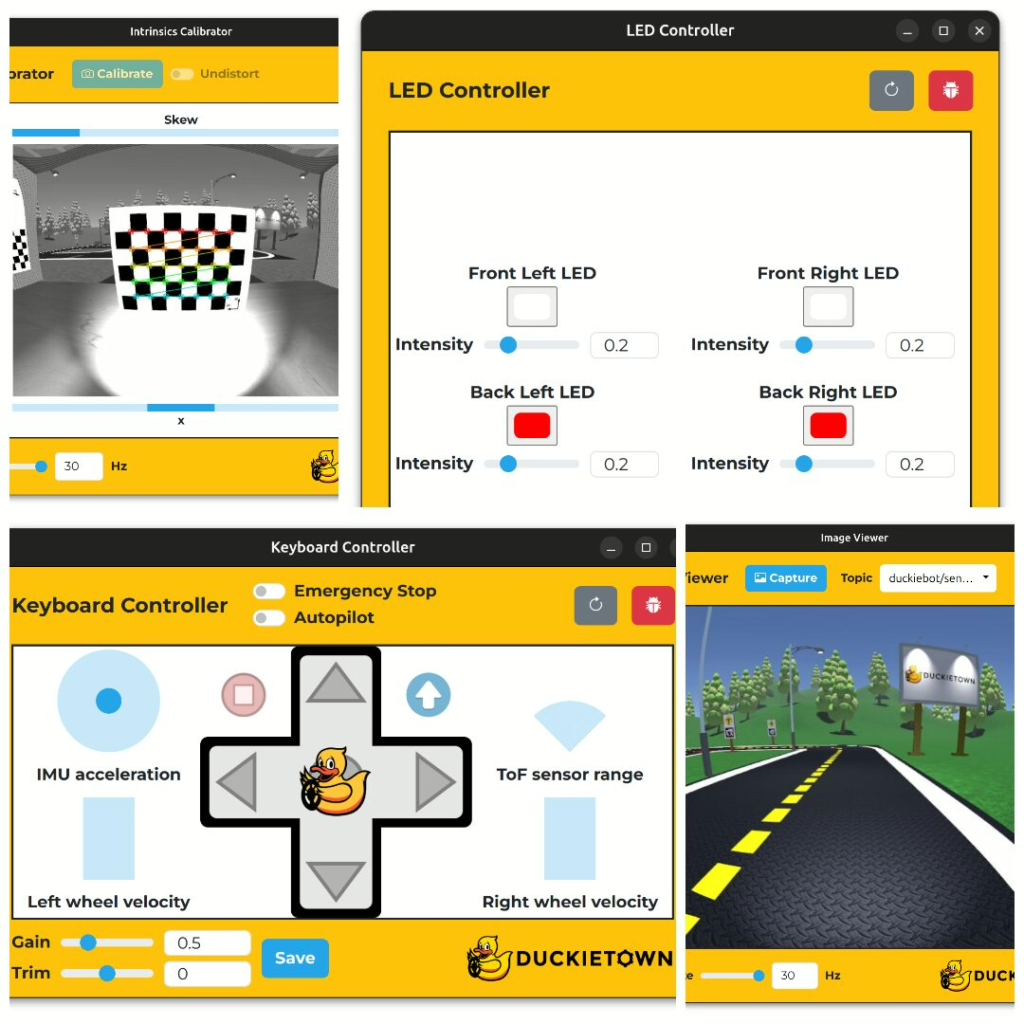
The Duckiematrix virtual environment
With ente comes the Duckiematrix, a photorealistic Unity-based virtual environment supporting virtual Duckietown robots.
The Duckiematrix allows simulating the physics and aesthetics of a physical Duckietown environment, as well as the sensing and acting capabilities of virtual Duckietown robots within that environment.
The Duckiematrix is programmable, lightweight, ROS compatible, and supports “multiplayer” features, where multiple learners can join the same city with their Duckiebots and learn & practice together.
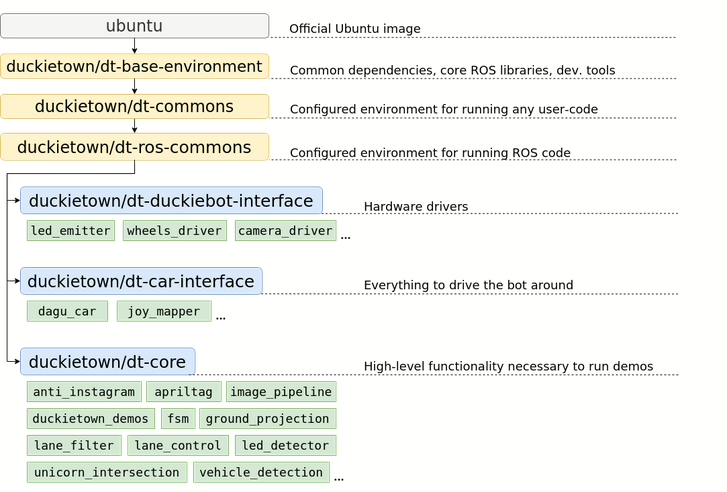
Virtual Duckiebots: digital twins for Duckietown robots
Virtual Duckietown robots allow for a Duckietown robot’s full software stack to be run on a local machine in its own Docker environment, and allowing for the full simulation of any aspect of that Duckietown robot within the Duckiematrix, simplifying testing and improving portability to the real world Duckiebots.
The code in the autonomy stack has been refactored so that the key algorithms are moved into libraries. This facilitates the creation of notebooks for experimentation and learning, as well as enabling the code to be more portable and disentangled from the ROS infrastructure, setting the stage for using other middleware (e.g., ROS2).
The Duckietown Manual: all information in a single place
All documentation and information have been consolidated in the Duckietown Manual, a single, authoritative, and searchable source.
The new Duckietown Manual is a great place to get started, as it contains step-by-step instructions on how to set up your computer, assemble, calibrate, and operate a Duckiebot, along with troubleshooting tips. It moreover includes information for advanced users who wish to develop using Duckietown, pointers to code Documentation, as well as an instructor manual with pedagogical insights for teachers.
Duckietown Postal Service (DTPS) and new development workflow
The Duckietown Postal Service (DTPS) is an HTTP/2 compatible message-passing system that bridges between the Duckietown robots and the environment, whether physical or digital. DTPS enables upgrading from ROS to ROS2, or the use of any other similar middleware, and makes Duckietown more compatible with all OSs.
In addition, a new development workflow has been implemented. The API for working with learning experiences (dts code) has been significantly improved over the previous version.
Coming soon: Self-Driving Cars with Duckietown 2025
A new edition of Self-Driving Cars with Duckietown MOOC, the world’s first robot autonomy massive open online course (MOOC) with hardware, will soon be announced. This new edition will be ente-based, support the Duckiematrix and be instructor-paced.
ROS 2 autonomy baseline and Python SDK interface
With DTPS enabling support for any middleware, translating the current ROS lane following pipeline into a ROS2 one is now a fun project. Coming out soon!
A Python SDK to interface Duckietown robots and the Duckiematrix is in the works as well.
Duckiematrix updates in development
Duckiematrix map editor
An app for creating and editing maps for the Duckiematrix.
Duckiematrix Gym
The integration of the Duckiematrix with Gymnasium.
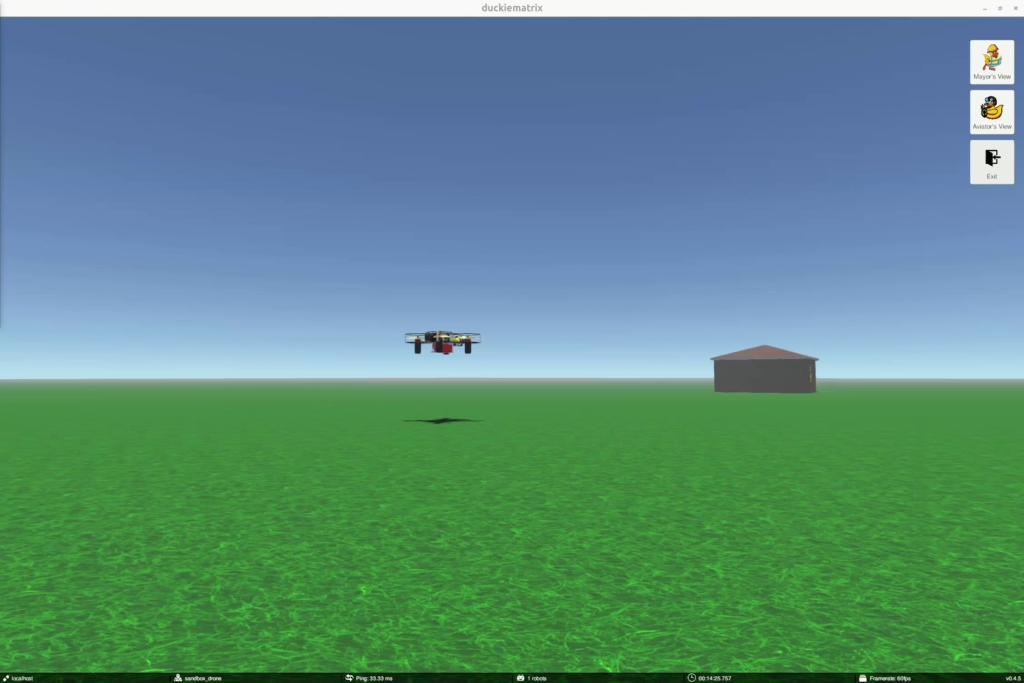
Duckiedrone support for the Duckiematrix
The addition of Virtual Duckiedrones and the integration of Duckiedrones with the Duckiematrix.
How to get started with Duckietown?
While the legacy daffy version of Duckietown will stay up and be supported for the time being, it will not receive further updates. To upgrade your environment and your Duckiebots to the new ente version and start experiencing all the new features for free, see our guide here.
About Duckietown
Duckietown is a platform for creating and disseminating robotics and AI learning experiences.
It is modular, customizable and state-of-the-art, and designed to teach, learn, and do research. From exploring the fundamentals of computer science and automation to pushing the boundaries of knowledge, Duckietown evolves with the skills of the user.
Autonomous navigation in Duckietown with QuackCruiser - objectives and approach
The objective of this project is to implement autonomous navigation in Duckietown by integrating perception, Dijkstra planning, and control into a Duckiebot (DB21J).
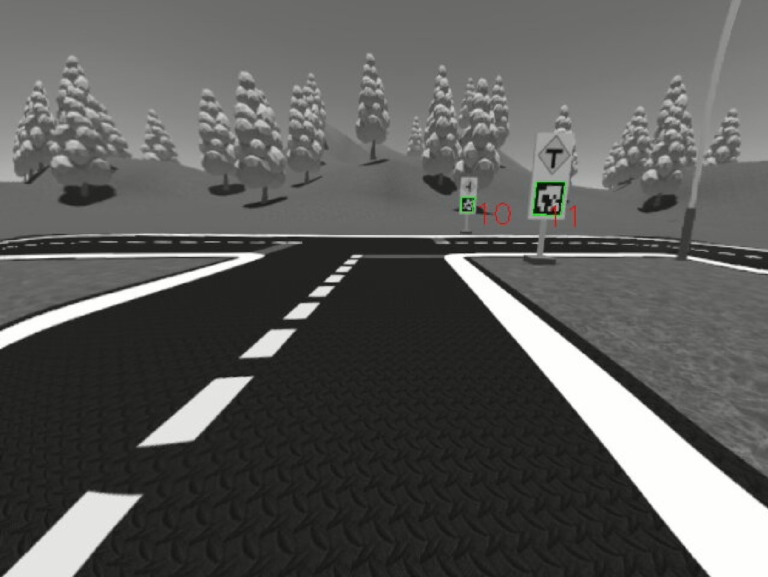
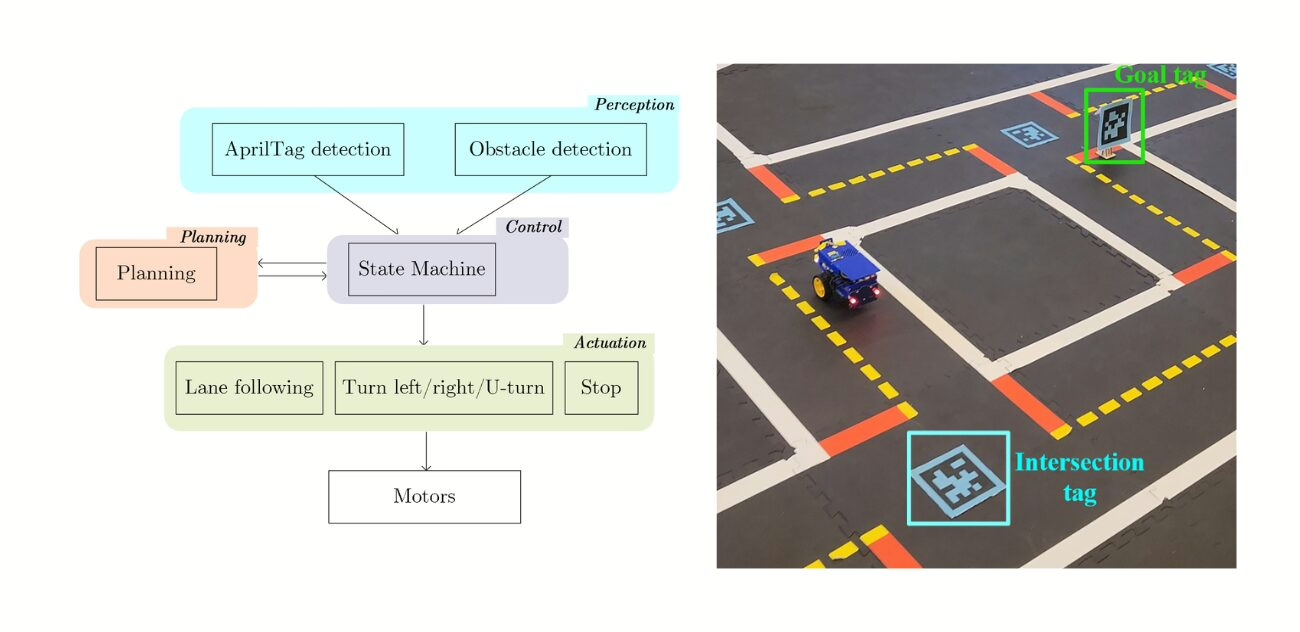
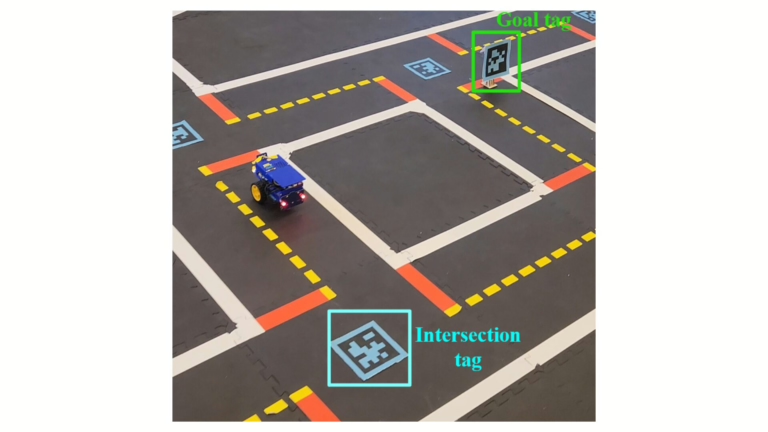
Localization at intersection is achieved using AprilTag detection, YOLO-ROS is used for real-time obstacle recognition, and onboard sensors such as wheel encoders and IMU are used for odometry. These inputs provide both exteroceptive data (from the environment) and interoceptive data (from the robot itself), which are fused to estimate pose and environment state.
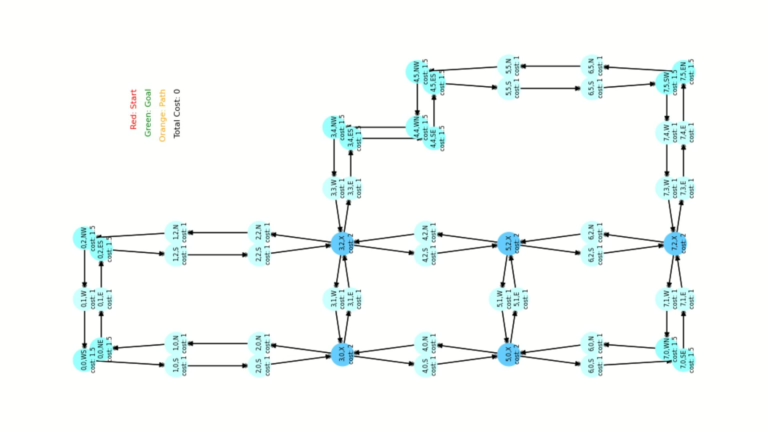
Planning is performed with Dijkstra planning algorithm, a graph search method that computes the shortest path on a grid-based map where intersections are nodes and lanes are edges with associated costs.
Control is implemented through PID-based lane following and parameterized turning services, where each maneuver is defined by velocity, radius, and execution time. A ROS state machine coordinates perception inputs and planning outputs to trigger the correct control actions in ‘real time’.
Autonomous navigation in Duckietown with QuackCruiser - highlights
The challenges
The principal challenges in implementing this agent emerge from hardware calibration, computational limitations, and cross-module synchronization.
Wheel encoder calibration directly influences odometric drift, while camera calibration governs the reliability of AprilTag-based localization and lane geometry estimation. The deployment of CUDA-accelerated YOLO models within the ROS ecosystem introduces compatibility constraints across GPU drivers, compiler toolchains, and real-time inference pipelines, which collectively impose significant computational overhead on limited embedded resources.
At the system integration level, temporal synchronization across perception modules (AprilTag detection, obstacle detection) and control modules (lane following, turning) constitutes a critical factor, as phase offsets and latencies propagate into localization uncertainty and trajectory deviation.
Sensor fusion must accommodate inconsistency between odometry estimates and visual updates, with conflict resolution strategies directly shaping the stability of pose estimation.
Furthermore, the tuning of control gains and maneuver execution parameters remains non-trivial, since cumulative deviations over extended trajectories amplify minor discrepancies in actuation dynamics and timing precision.
System Architecture for Duckietown Autonomous Navigation
Environment Setup for Duckietown Autonomous Navigation
Map Graph for Duckietown Autonomous Navigation
Terminal Log for Duckietown Autonomous Navigation
Looking for similar projects?
Check out the following works on path planning with Duckietown:
Duckietown is a modular, customizable, and state-of-the-art platform for creating and disseminating robotics and AI learning experiences.
Duckietown is designed to teach, learn, and do research: from exploring the fundamentals of computer science and automation to pushing the boundaries of knowledge.
These spotlight projects are shared to exemplify Duckietown’s value for hands-on learning in robotics and AI, enabling students to apply theoretical concepts to practical challenges in autonomous robotics, boosting competence and job prospects.