- Title: Duckietown: An open, inexpensive and flexible platform for autonomy education and research
- Authors: Liam Paull; Jacopo Tani; Heejin Ahn; Javier Alonso-Mora; Luca Carlone; Michal Cap; Yu Fan Chen; Changhyun Choi; Jeff Dusek; Yajun Fang; Daniel Hoehener; Shih-Yuan Liu; Michael Novitzky; Igor Franzoni Okuyama; Jason Pazis; Guy Rosman; Valerio Varricchio; Hsueh-Cheng Wang; Dmitry Yershov; Hang Zhao; Michael Benjamin; Christopher Carr; Maria Zuber; Sertac Karaman; Emilio Frazzoli; Domitilla Del Vecchio; Daniela Rus; Jonathan How; John Leonard; Andrea Censi
- Published: 2017 IEEE International Conference on Robotics and Automation (ICRA)
Duckietown: An open, inexpensive and flexible platform for autonomy education and research
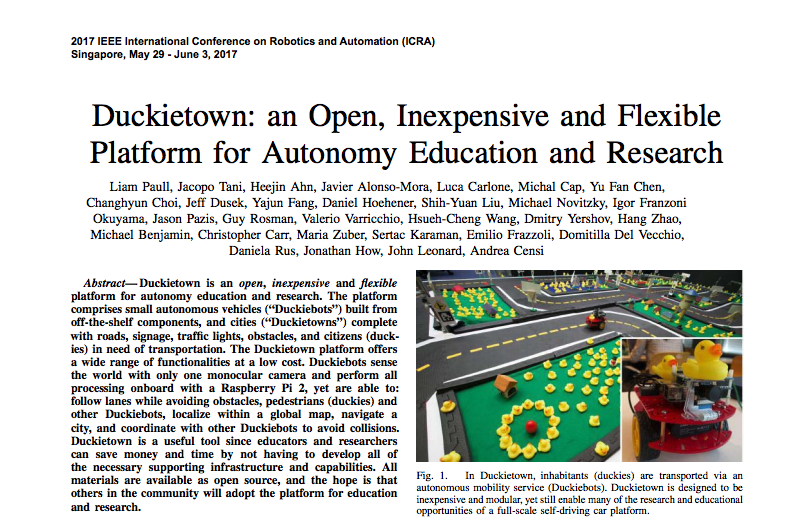
Duckietown is an open, inexpensive and flexible platform for autonomy education and research. The platform comprises small autonomous vehicles (“Duckiebots”) built from off-the-shelf components, and cities (“Duckietowns”) complete with roads, signage, traffic lights, obstacles, and citizens (duckies) in need of transportation. The Duckietown platform offers a wide range of functionalities at a low cost. Duckiebots sense the world with only one monocular camera and perform all processing onboard with a Raspberry Pi 2, yet are able to: follow lanes while avoiding obstacles, pedestrians (duckies) and other Duckiebots, localize within a global map, navigate a city, and coordinate with other Duckiebots to avoid collisions. Duckietown is a useful tool since educators and researchers can save money and time by not having to develop all of the necessary supporting infrastructure and capabilities. All materials are available as open source, and the hope is that others in the community will adopt the platform for education and research.
Did you find this interesting?
Read more Duckietown based papers here.
