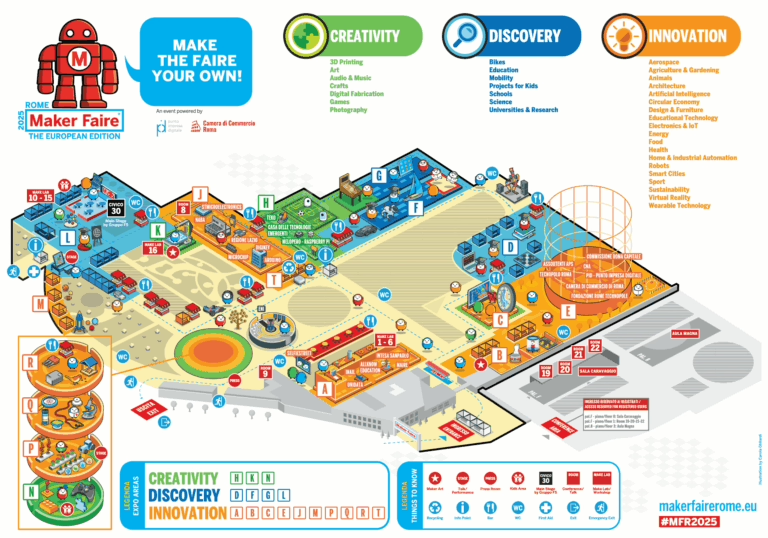
Duckietown, represented by Jacopo Tani, Ph.D., was part of a panel of judges tasked with assigning an award to the best project participating in the robotics creative contest. The “20°Trofeo Internazionale di robotica Città di Roma [20th International Robotics Trophy, City of Rome]” (Rescue Line, Explorer Junior, Explorer Senior, Robotic arms) took place as well.
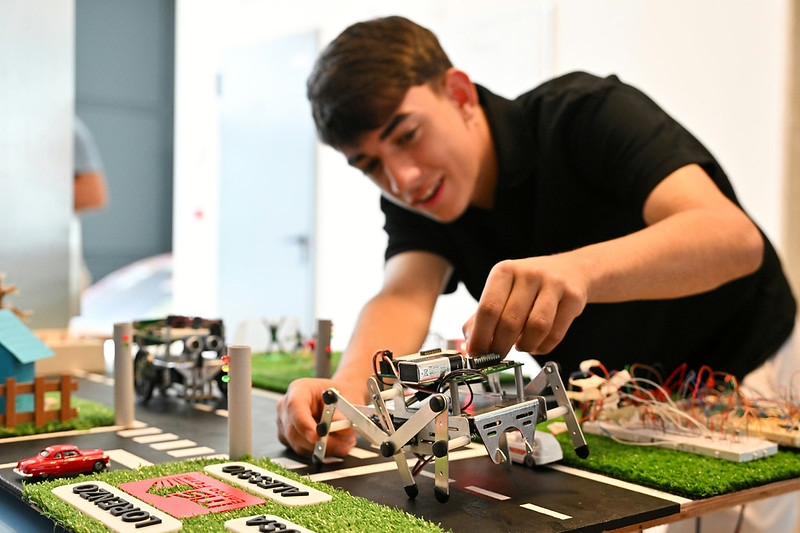
Prototype robotic applications were presented (assistance,
agriculture, etc.) in various categories: AgroBOT, CoBOT, DroneBOT,
MareBOT, NonniBOT, TirBOT, and this year also a HealthBOT category.
Following a brief presentation session, the jury composed by Ezia Palmeri, senior official at the Ministry of Education and Merit; Fabrizio Corradi, psychotechnologist and expert in assistive technologies, augmentative and alternative communication, and artificial intelligence at LUMSA and the Leonarda Vaccari Institute; Alessia Lo Bosco, Director of Vocational Training Services for the Metropolitan City of Rome; Massimiliano Dibitonto, Head of Product and Services Guidelines at Olivetti and Jacopo Tani, co-founder, Chairman and Chief Executive Officer (CEO) of Duckietown.
The winning teams from the 2026 edition:
MAREBOT – Thalassa Boat, IIS Marconi Pieralisi
TIRBOT – Road Safety and AI, IIS De Santis
NONNIBOT – Word Shield, IIS Giordano
AGROBOT – Diet Bot, IIS Russell (Cles)
COBOT – Aura, IIS Avogadro
RobotCT – IIS Vaccarini (Catani