Duckietown Workshop at RoboCup Junior 2019
In collaboration with the RoboCup Federation, the Duckietown Foundation will be offering workshops at RoboCup 2019 in Sydney, Australia, providing a hands-on introduction to the Duckietown platform.

We will be hosting three one-day workshops as part of RoboCup 2019 from July 4-6, 2019 for teachers, students, and independent learners who are interested in finding out more about the Duckietown platform. Attendance is completely free and everyone is welcome to apply, even if you are not participating in RoboCup.
There are no formal requirements, though basic familiarity with GNU/Linux and shell usage is recommended.
If you would like to apply to attend a workshop, please complete this form.
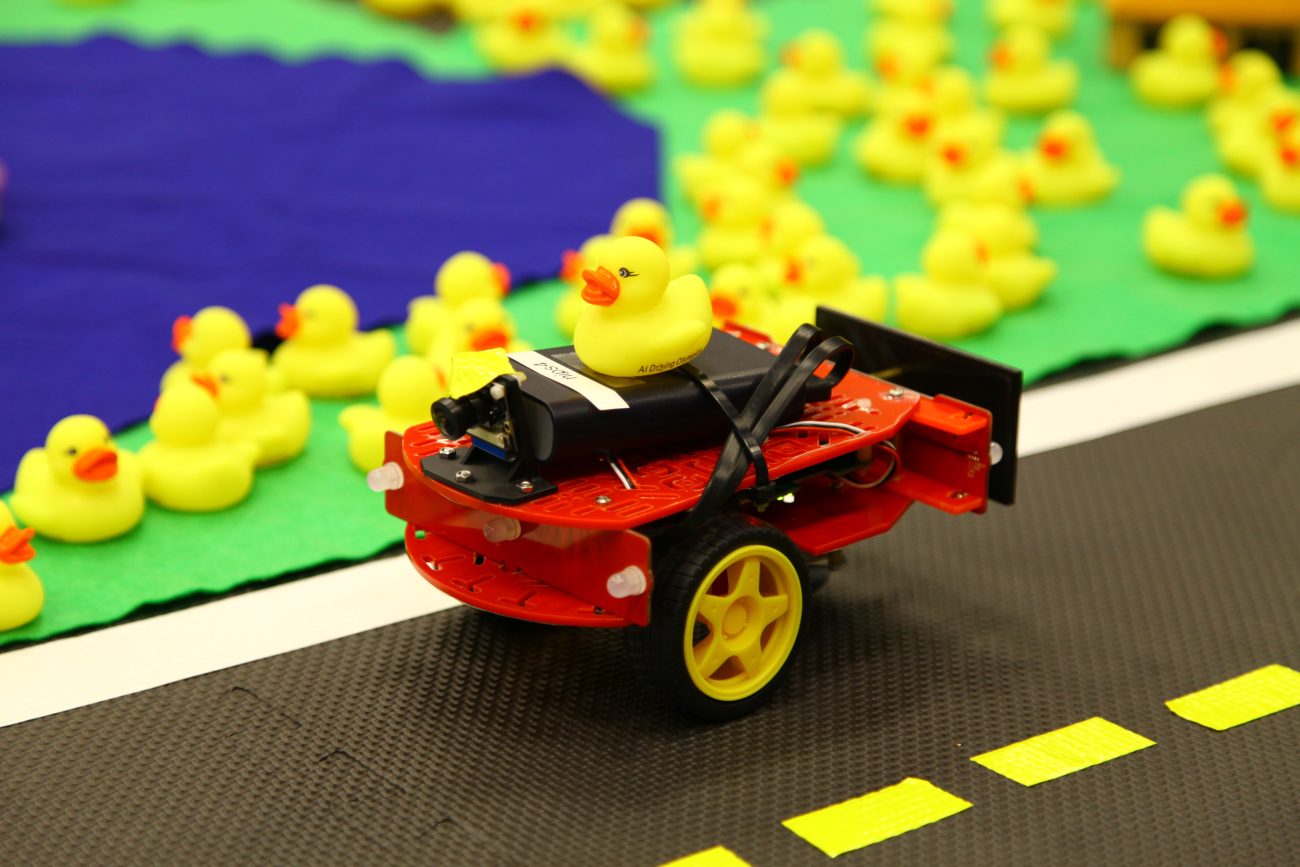
We will have Duckiebots and Duckietowns for participants to use. However, you are more than welcome to bring your own Duckiebots, available for purchase at https://get.duckietown.com.

We will be hosting three one-day workshops as part of RoboCup 2019 from July 4-6, 2019 for teachers, students, and independent learners who are interested in finding out more about the Duckietown platform. Attendance is completely free and everyone is welcome to apply, even if you are not participating in RoboCup. There are no formal requirements, though basic familiarity with GNU/Linux and shell usage is recommended.
If you would like to apply to attend a workshop, please complete this form.
We will have Duckiebots and Duckietowns for participants to use. However, you are more than welcome to bring your own Duckiebots, available for purchase at https://get.duckietown.com.