City Rescue: Autonomous Recovery System for Duckiebots
Project Resources
- Objective: Develop an autonomous recovery system to detect distressed Duckiebots in Duckietown and rescue them back to the road.
- Approach: Utilize a Duckietown infratructure-based "real-time" localization system integrated with a server-based rescue mechanism to monitor, classify distress, and execute recovery maneuvers.
- Authors: Carl Biagosch, Shengjie Hu, Martin Ziran Xu
Project highlights
-
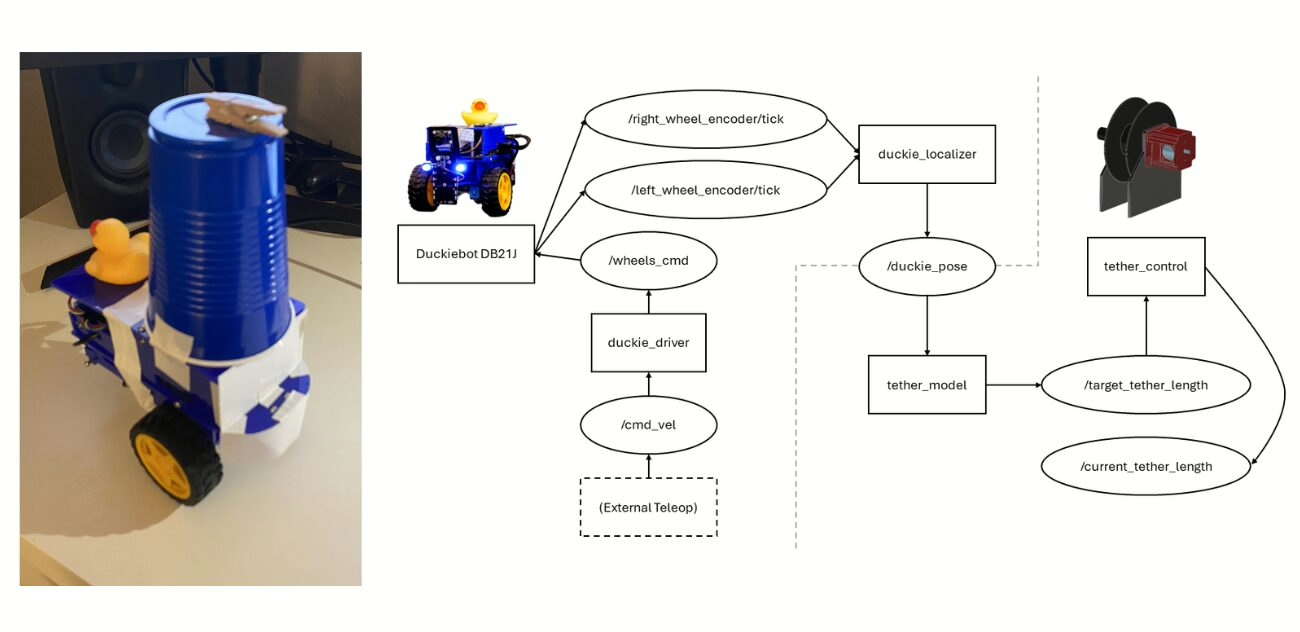
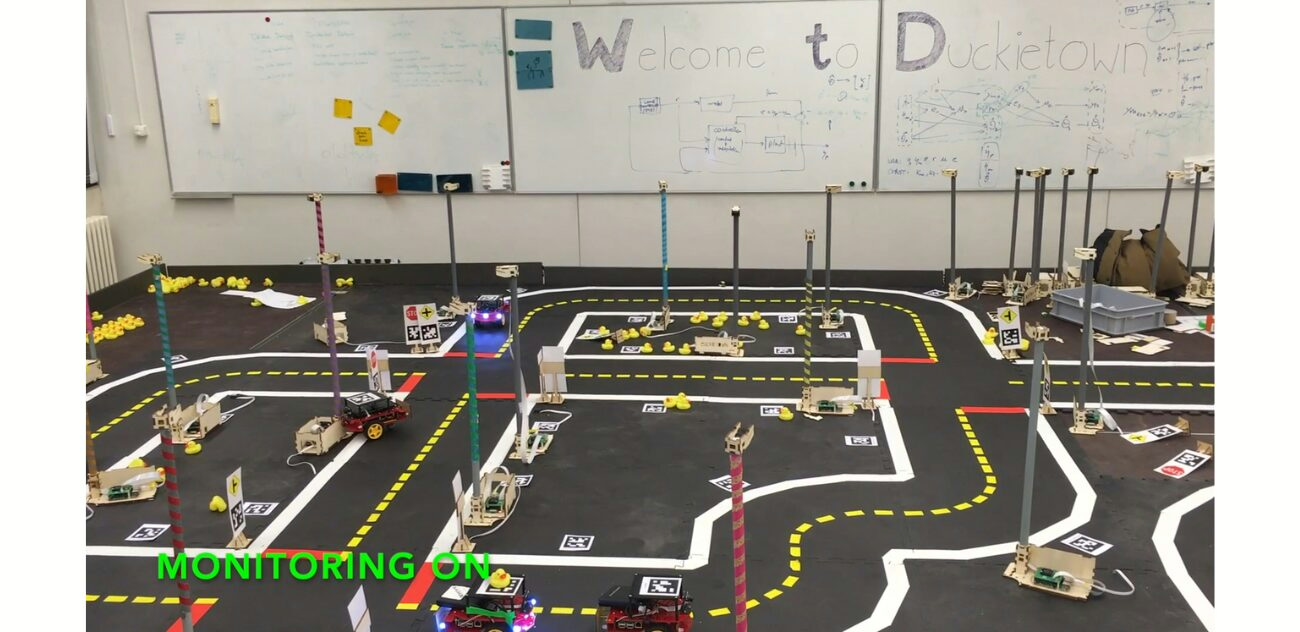
- Figure 1. Software Architecture Overview
-
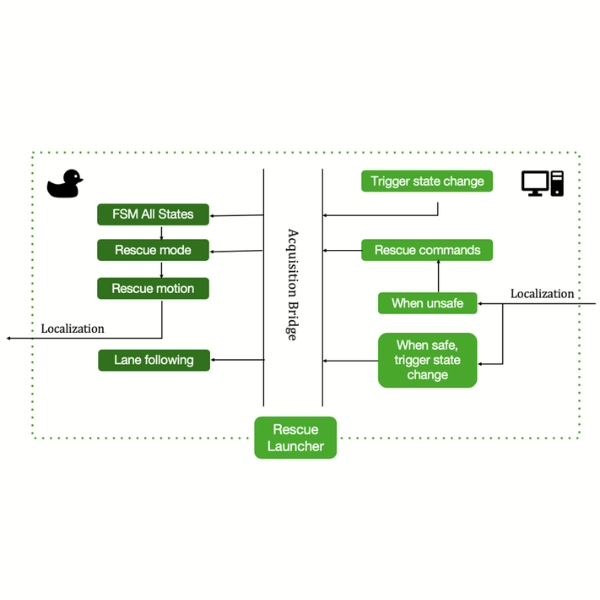
- Figure 2. Server-Side Software Architecture
-
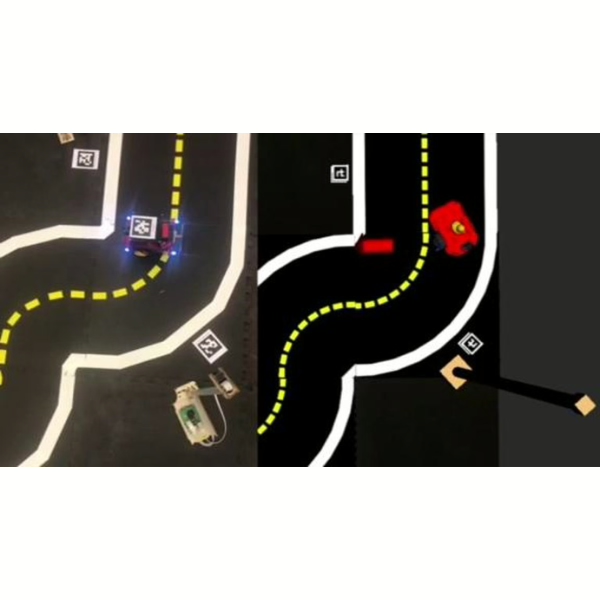
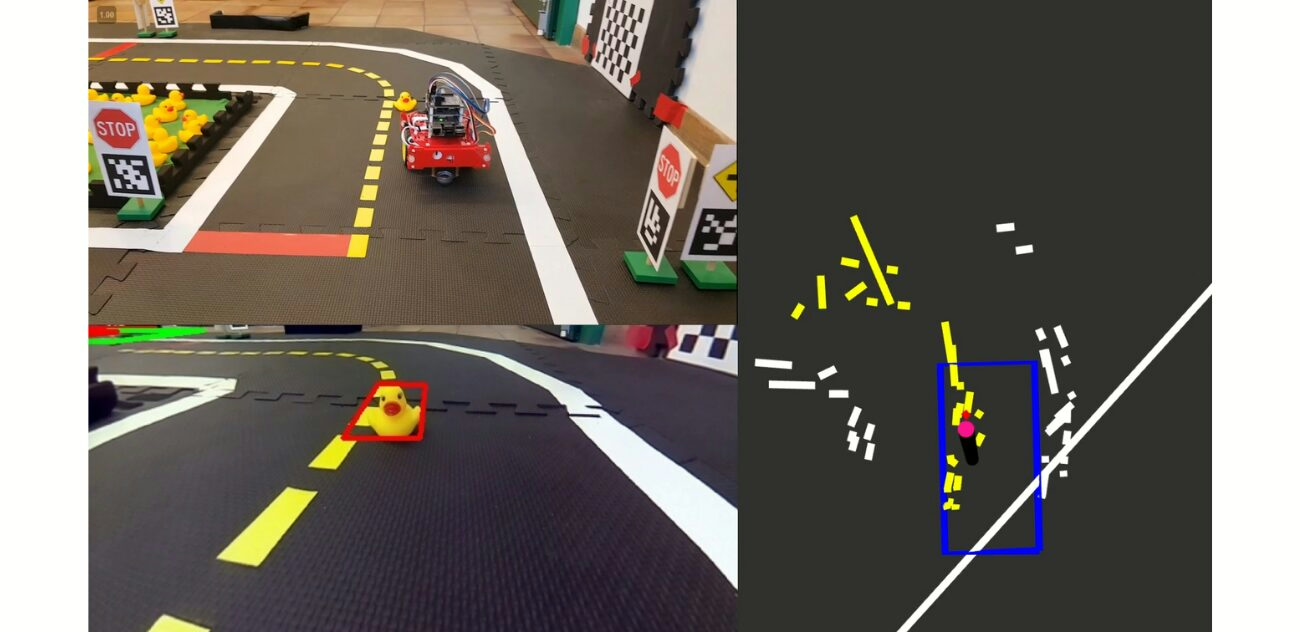
- Figure 3. Simple Localization vs. CSLAM
-
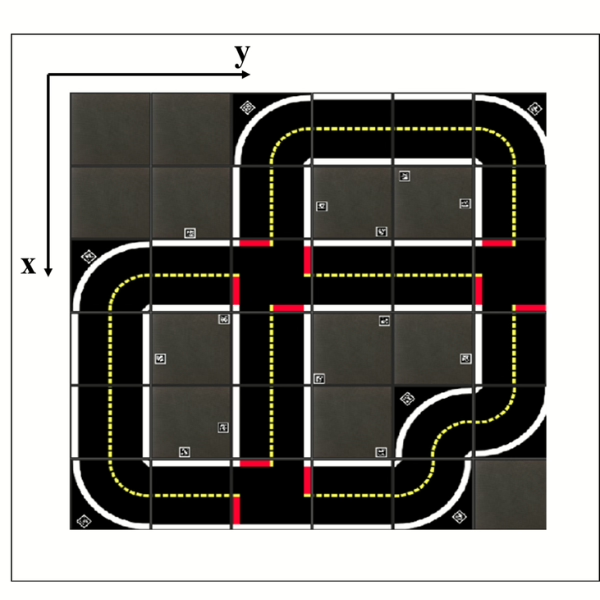
- Figure 4. Map Visualization of AMOD-K31
-
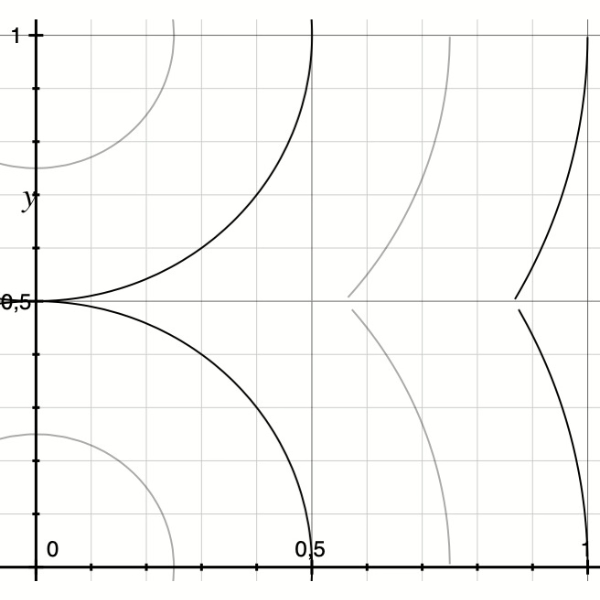
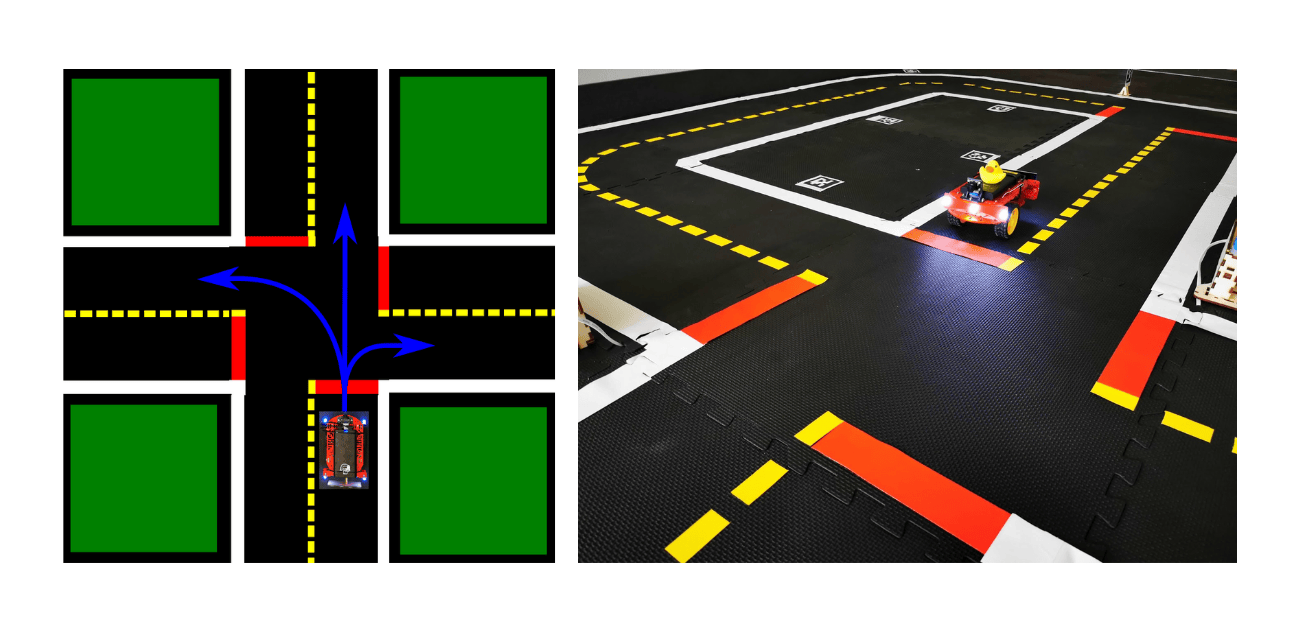
- Figure 5. 3-Way Intersection Path Planning
-
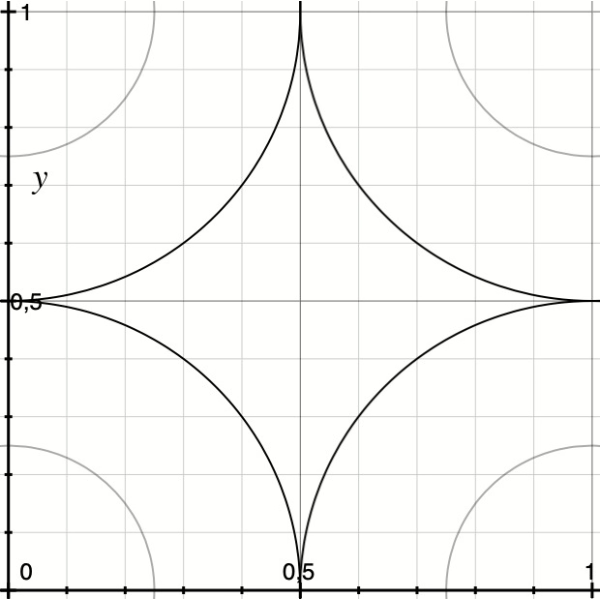
- Figure 6. 4-Way Intersection Path Planning
City rescue: autonomous recovery system for Duckiebots - the objectives
Would it not be desirable to have the city we drive in monitor our vehicle, as a guardian angel ready to intervene in case of distress offering autonomous recovery services?
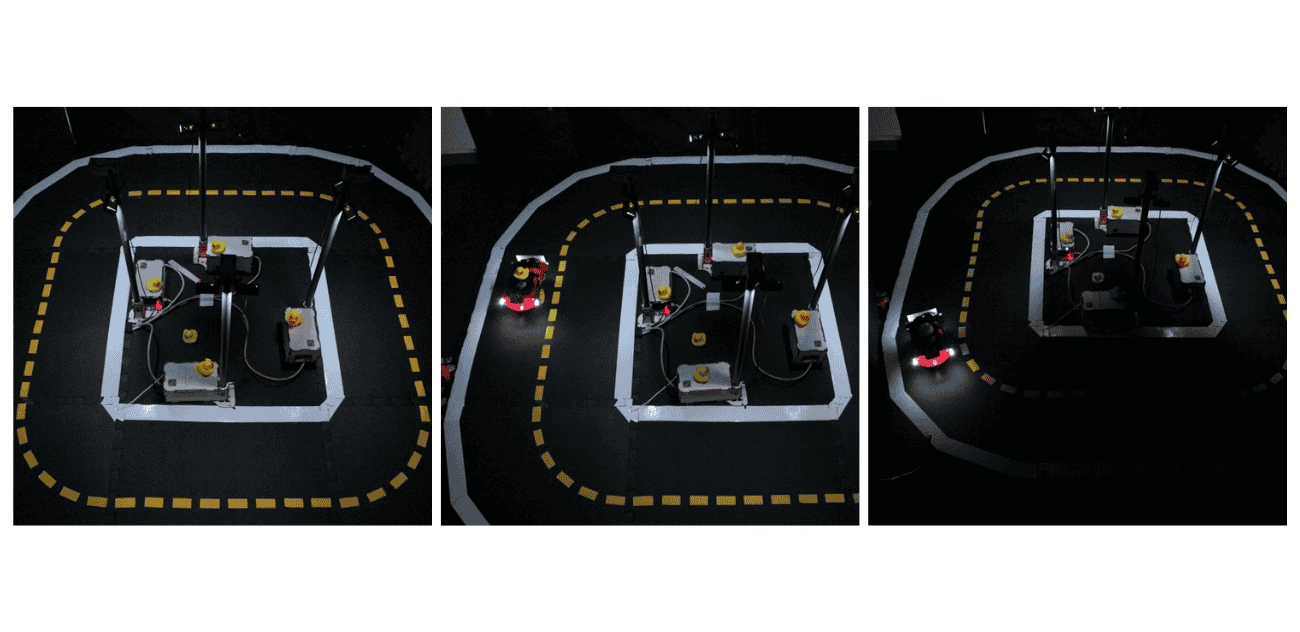
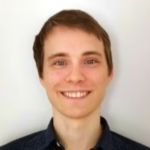
The project, “City Rescue” is a first step towards enabling a continuous monitoring system from traffic lights and watchtowers, smart infrastructure in Duckietown, aimed at localization and communicating with Duckiebots as they autonomously operate in town.
Despite the robust autonomy algorithms guiding the behaviors of Duckietown in Duckietowns, distress situations such as lane departures, crashes, or stoppages, might happen. In these cases human intervention is often necessary to reset experiments.
This project introduces an automated monitoring and rescue system that identifies distressed agents, classifies their distress state, and calculates and communicates corrective actions to restore Duckiebots to normal operation.
The City-Rescue project incorporates several key components to achieve autonomous monitoring and recovery of distressed Duckiebots:
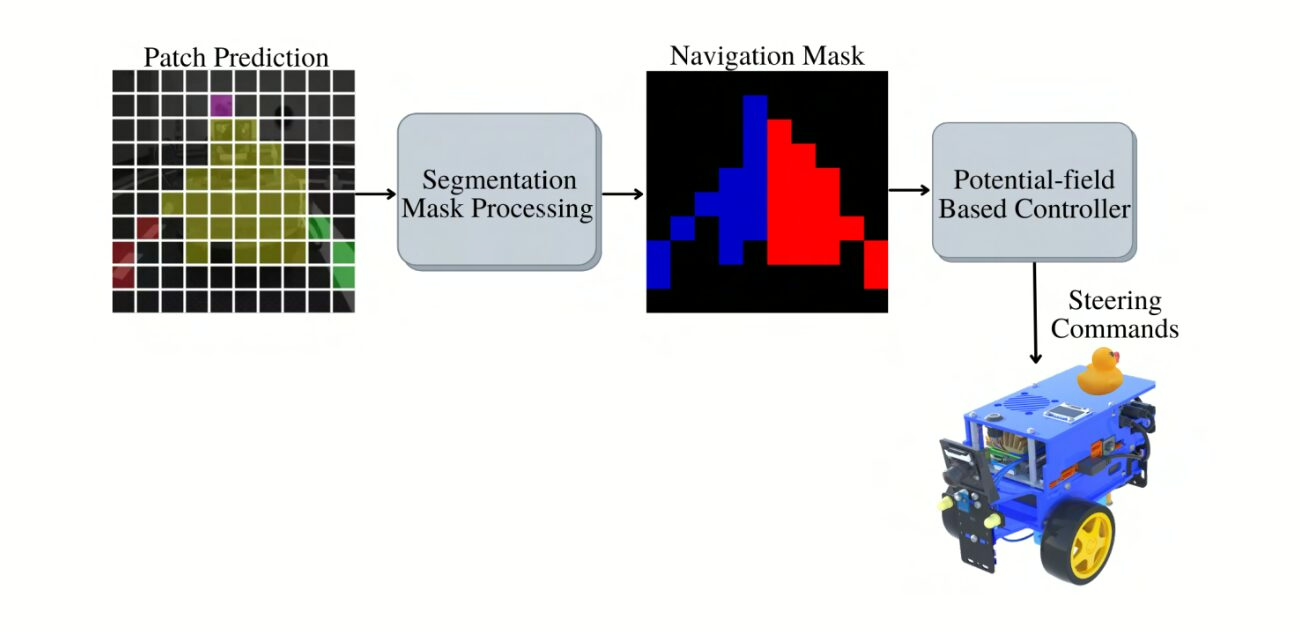
- Distress detection: classifies failure states such as lane departure, collision, and immobility using real-time localization data.
- Lightweight real-time localization: implements a simplified localization system using AprilTags and watchtower cameras, optimizing computational efficiency for real-time tracking.
- Decentralized rescue architecture: employs a central Rescue Center and multiple Rescue Agents, each dedicated to an individual Duckiebot, enabling simultaneous rescues.
- Closed-loop control for recovery: uses a proportional-integral (PI) controller to execute corrective movements, bringing Duckiebots back to lane-following mode.
City Rescue is a great example of vehicle-to-infrastructure (v2i) interactions in Duckietown.
The challenges and approach
The City Rescue autonomous recovery system employs a server-based architecture, where a central “Rescue Center” continuously processes localization data and assigns rescue tasks to dedicated Rescue Agents.
The localization system uses appropriately placed reference AprilTags and watchtower cameras, tuned for low-latency operation by bypassing computationally expensive optimization routines. The rescue mechanism is driven by a PI controller, which calculates corrective movements based on deviations from an ideal trajectory.
The main challenges in implementing this city behavior include localization inaccuracies, due to the limited coverage of watchtower cameras, and distress event positioning on the map.
The localization inaccuracies are mitigated by performing camera calibration procedures on the watchtower cameras, as well as by performing an initial city offset calibration procedure. The success rate of the executed maneuvers varies with map topographical complexity; recovery from curved road or intersection sections is less reliable than from straight lanes.
Finally, the lack of inter-robot communication can lead to cascading failure scenarios when multiple Duckiebots collide.
City rescue: full report
The design and implementation of this autonomous recovery system is documented in the following report.
City rescue in Duckietown: Authors

Carl Philipp Biagosch is the co-founder at Mantis Ropeway Technologies, Switzerland.

Jason Hu is currently working as a Scientific Assistant at ETH Zurich, Switzerland.

Learn more
Duckietown is a modular, customizable, and state-of-the-art platform for creating and disseminating robotics and AI learning experiences.
Duckietown is designed to teach, learn, and do research: from exploring the fundamentals of computer science and automation to pushing the boundaries of knowledge.
These spotlight projects are shared to exemplify Duckietown’s value for hands-on learning in robotics and AI, enabling students to apply theoretical concepts to practical challenges in autonomous robotics, boosting competence and job prospects.