Here are the conclusions from the author of this paper:
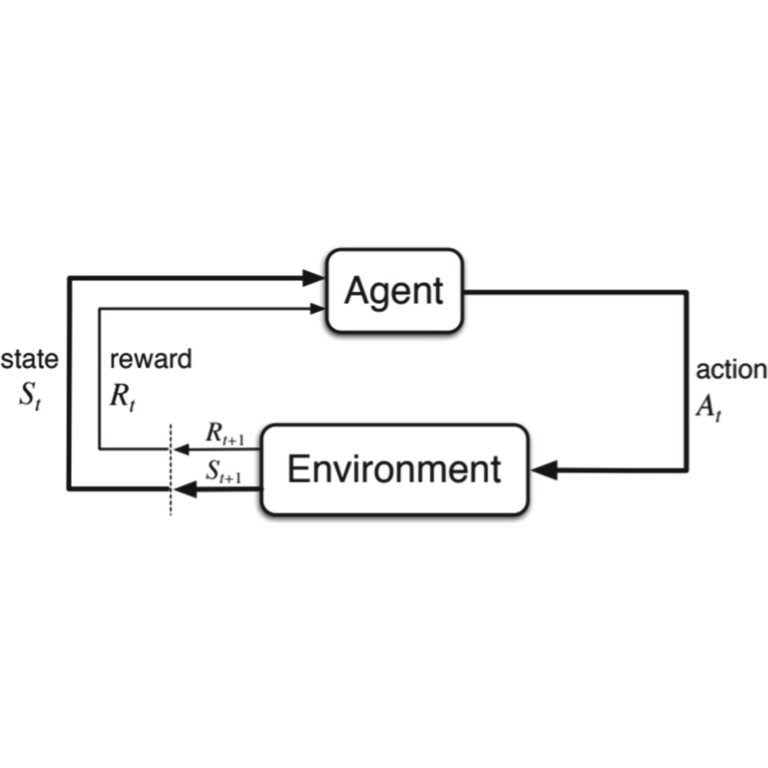
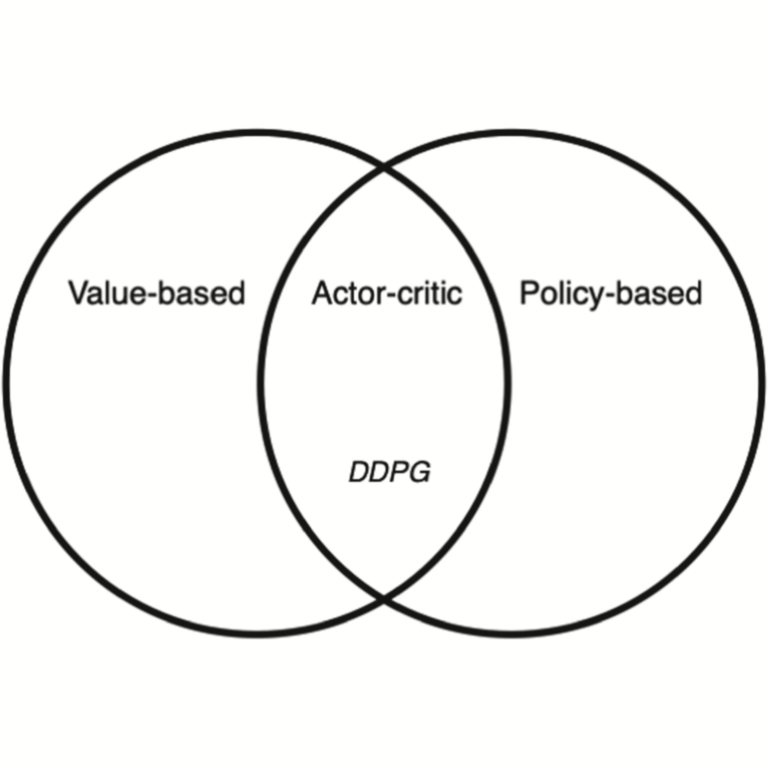
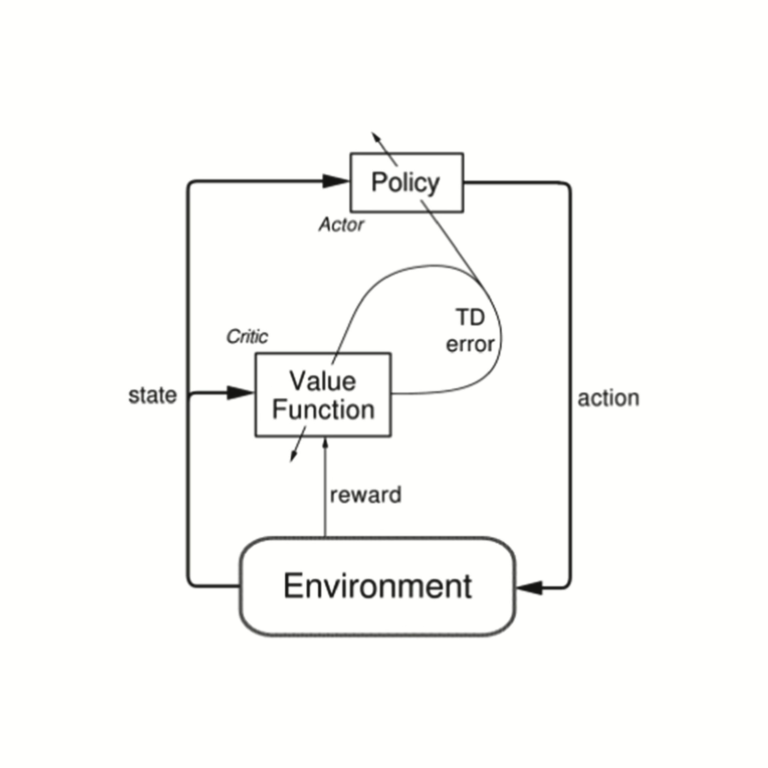
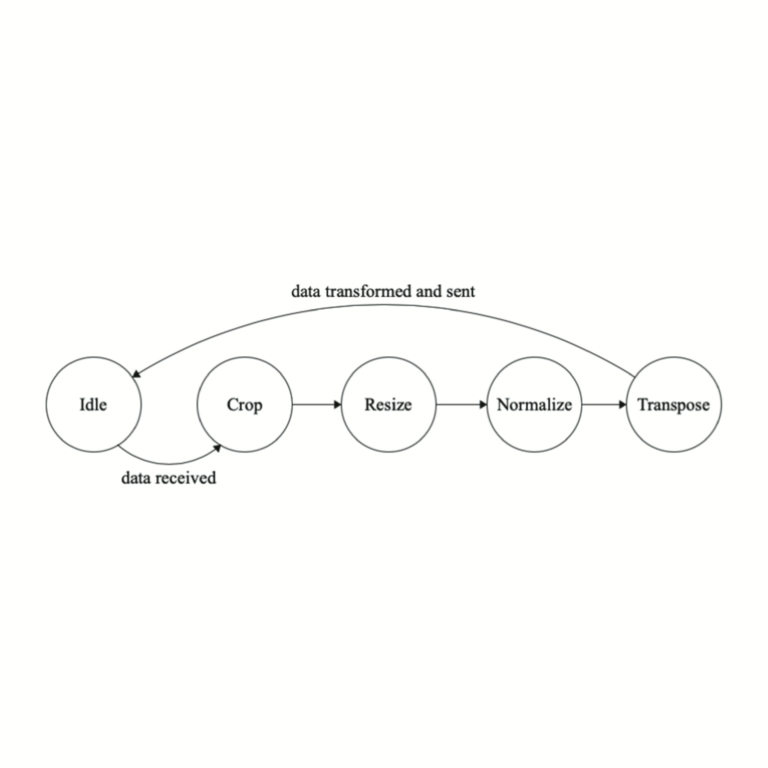
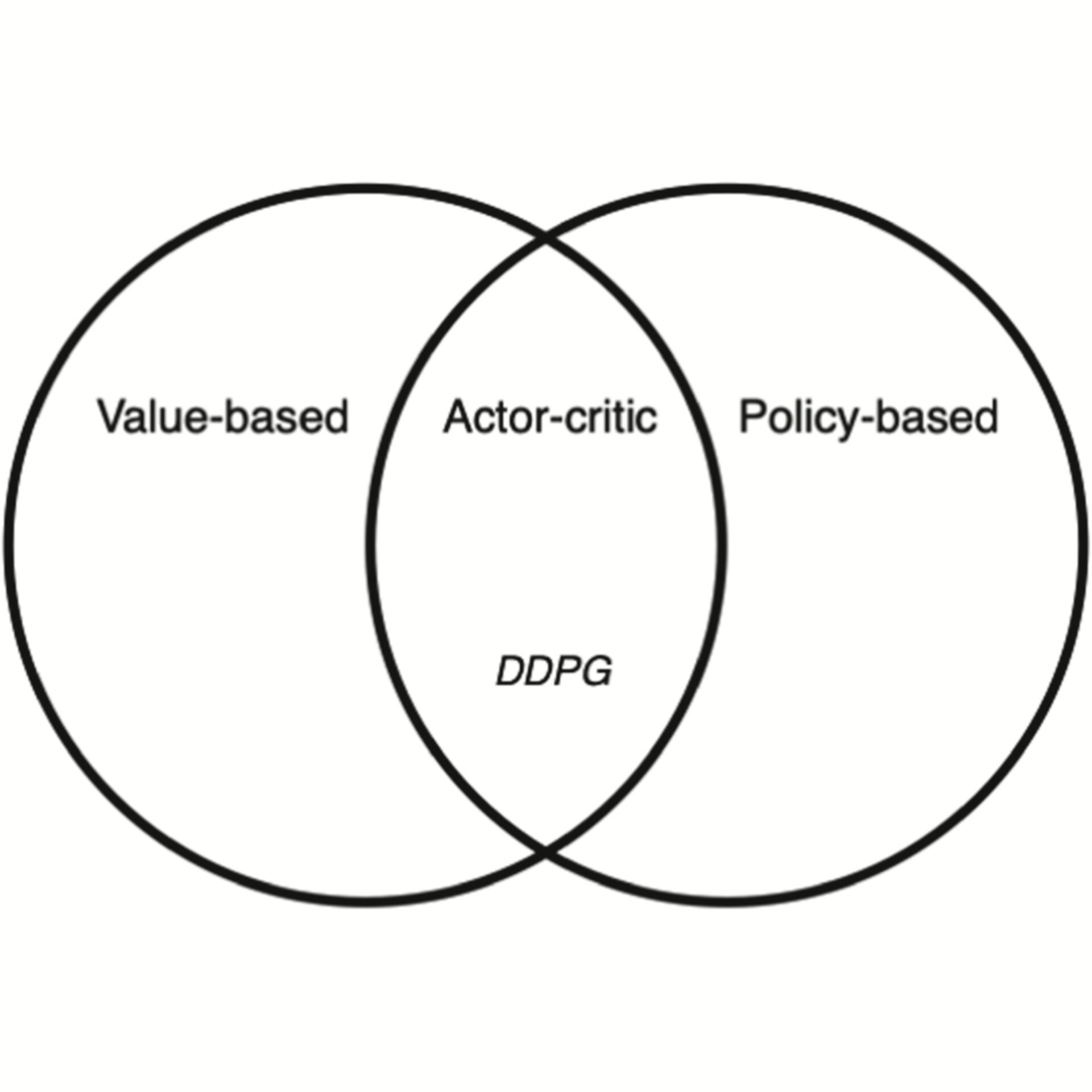
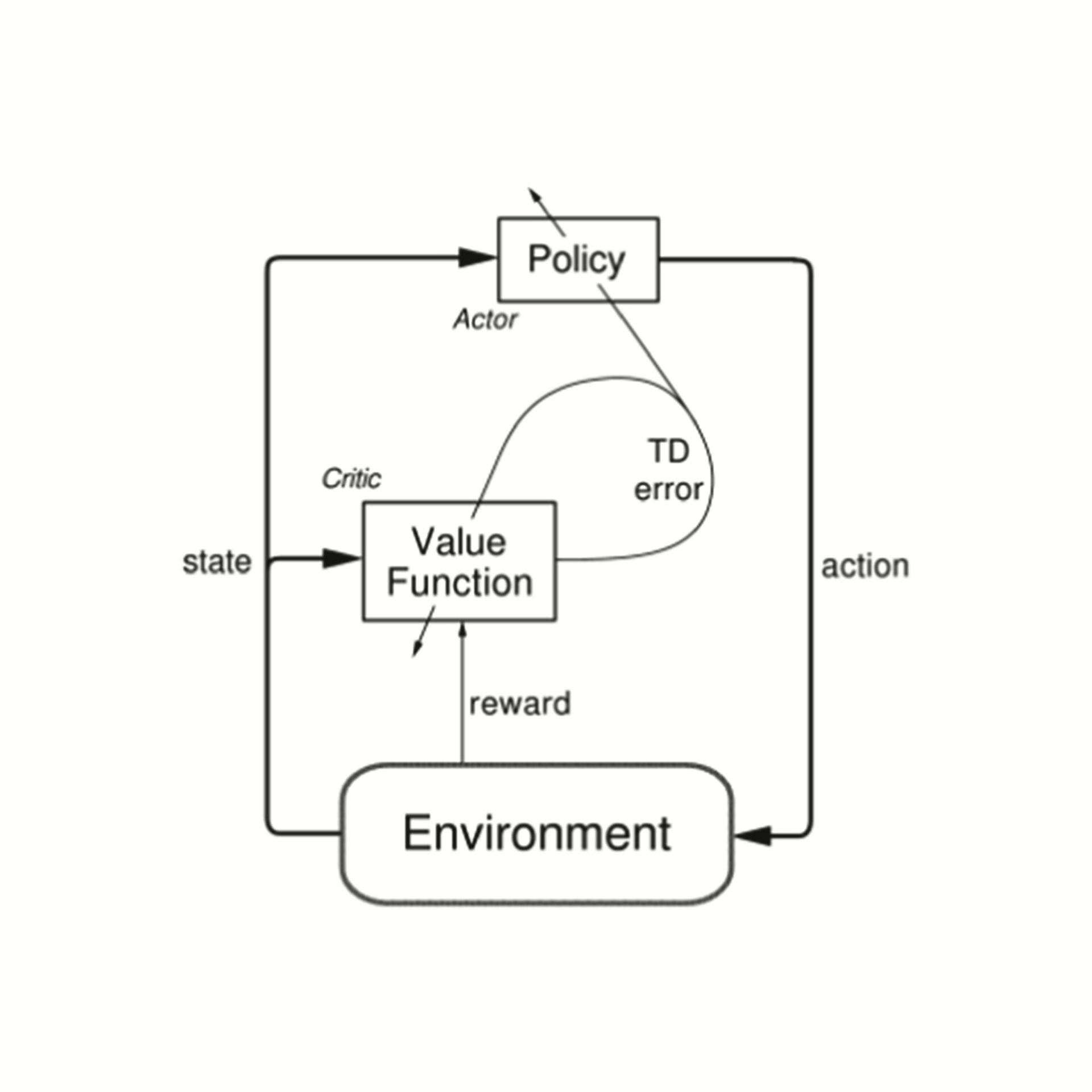
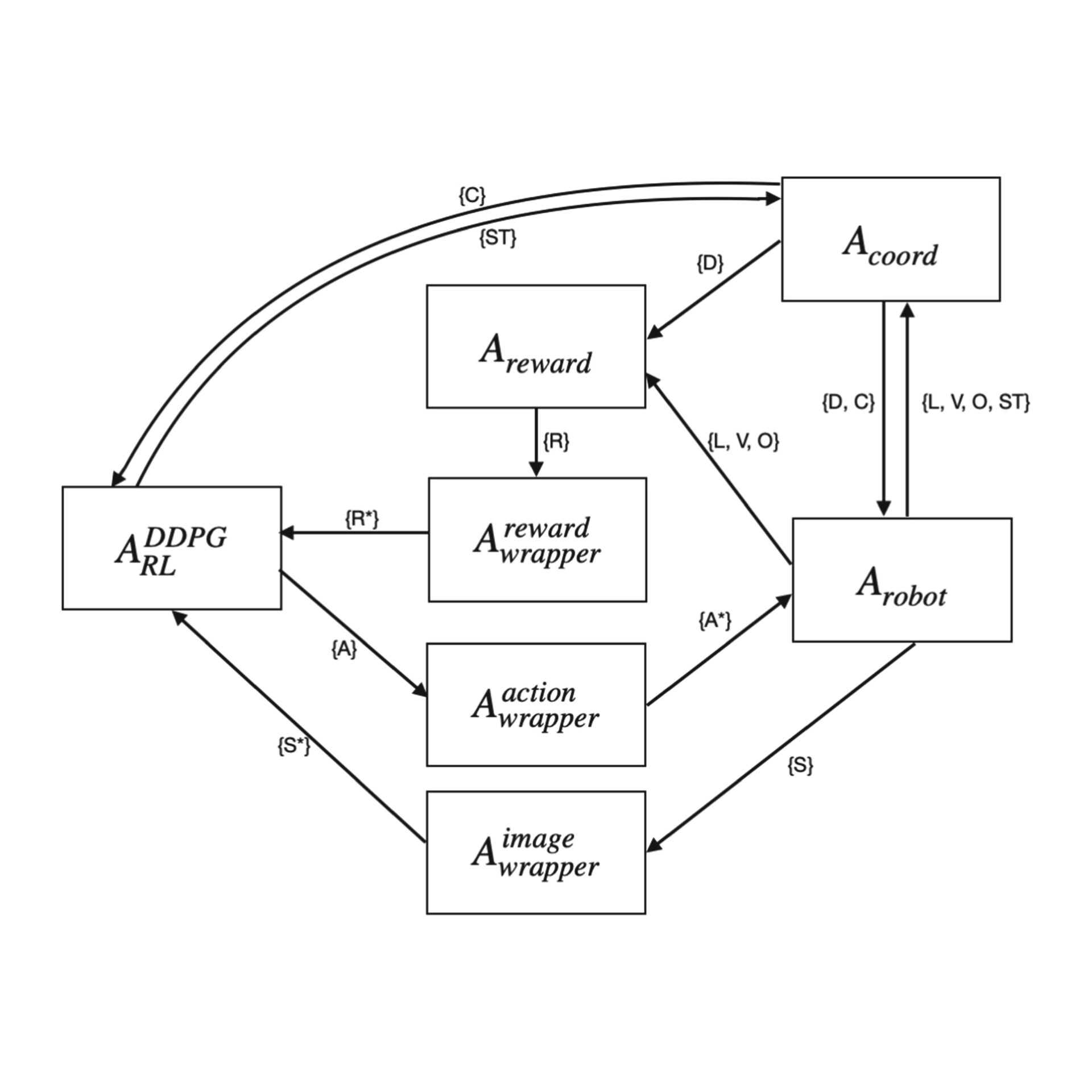
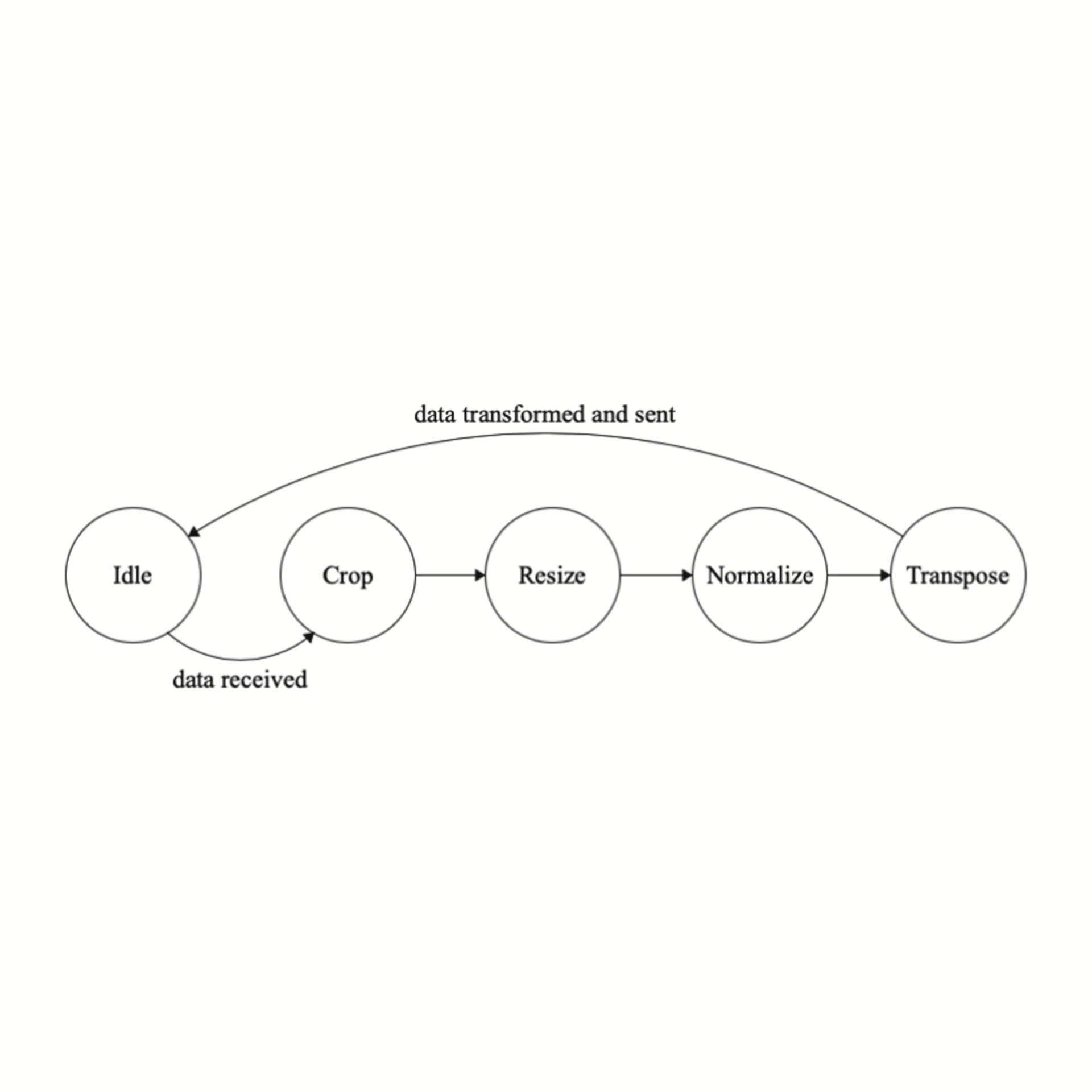
“After several breakthroughs in the field of Deep Reinforcement Learning, it became one of the most popular researched topics in Machine Learning and a common approach to the problem of autonomous driving. This paper presents the process of training an autonomous robotic system using popular actor-critic algorithm in the simulator, which may then also be run on real robot. It was possible to train an agent in real-time using trial-and-error approach without the need to collect vast amounts of labeled data. The neural network learned how to control the robot and how to follow the lanes, without any explicit guidelines. Only a few functions have been used to transform the data sent between environment and the agent, in order to make the learning process smoother and faster.
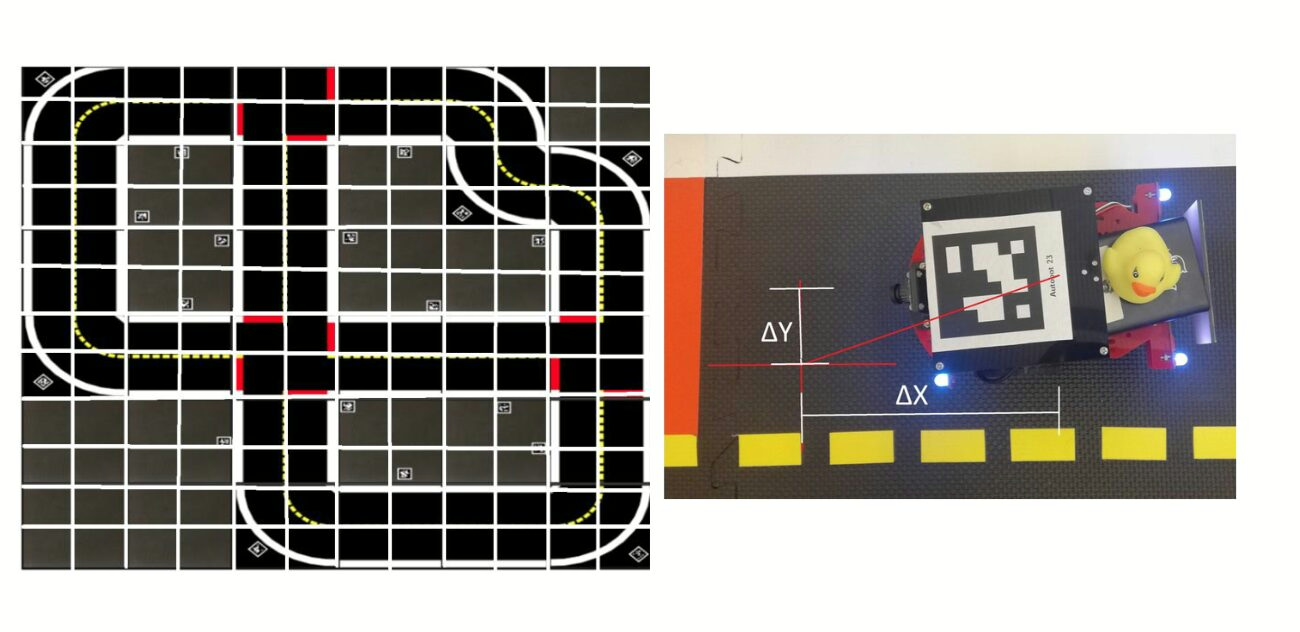
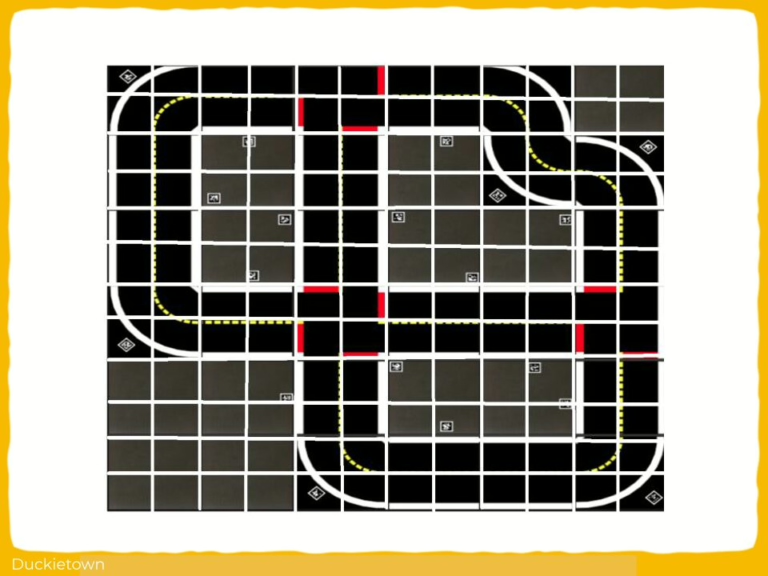
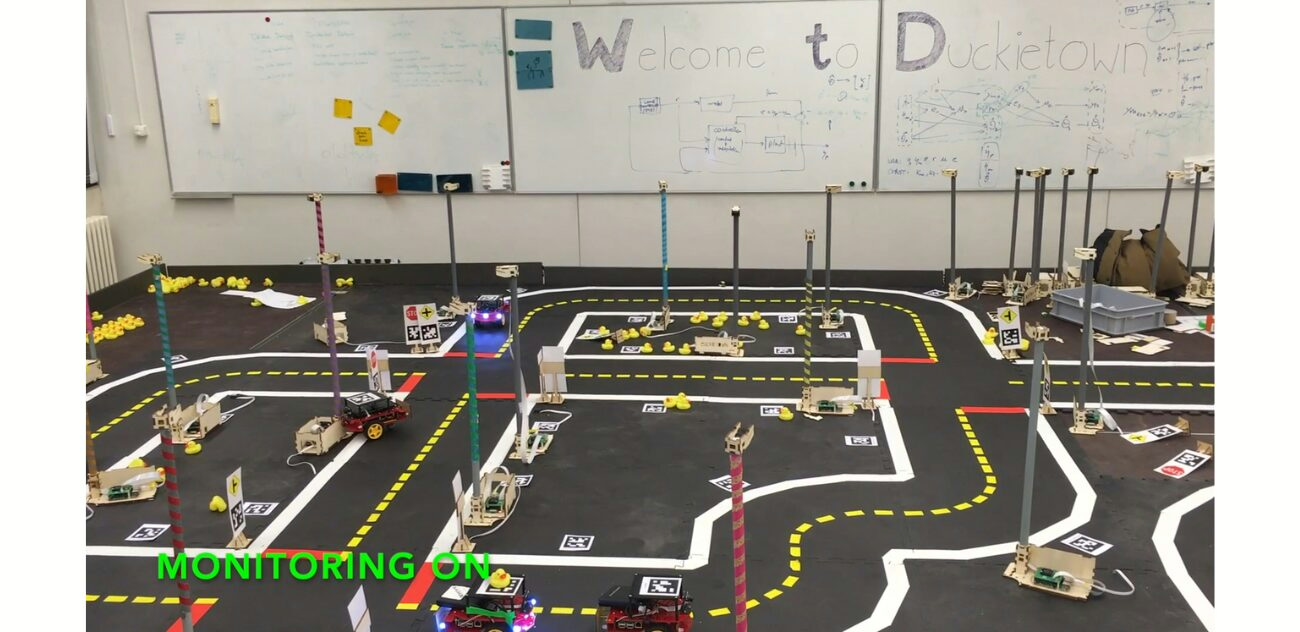
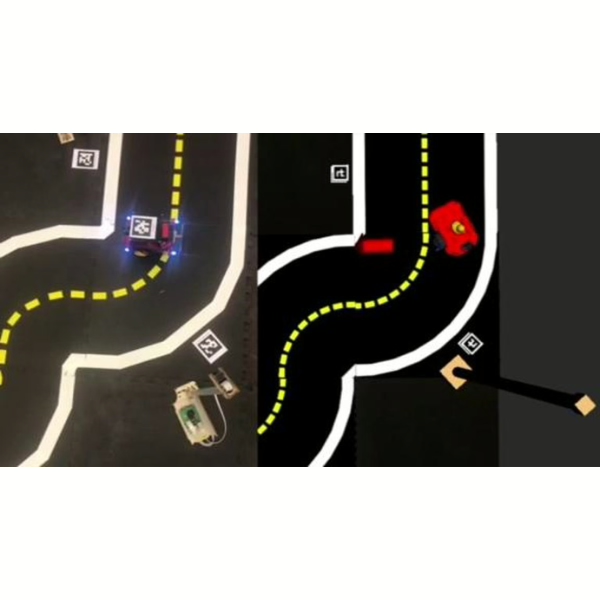
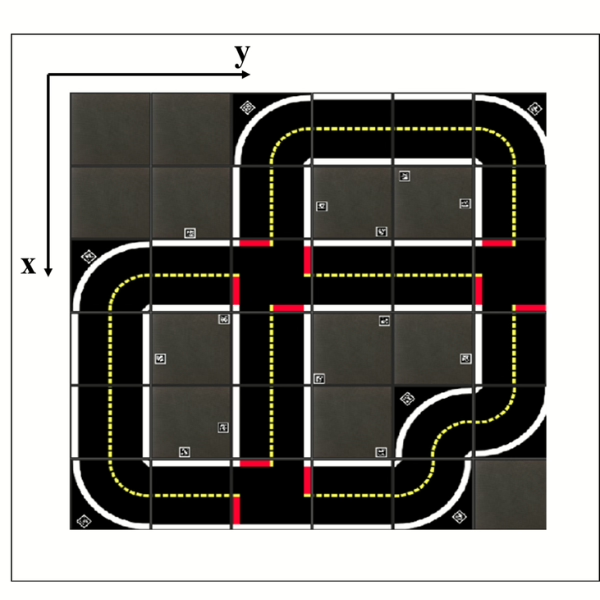
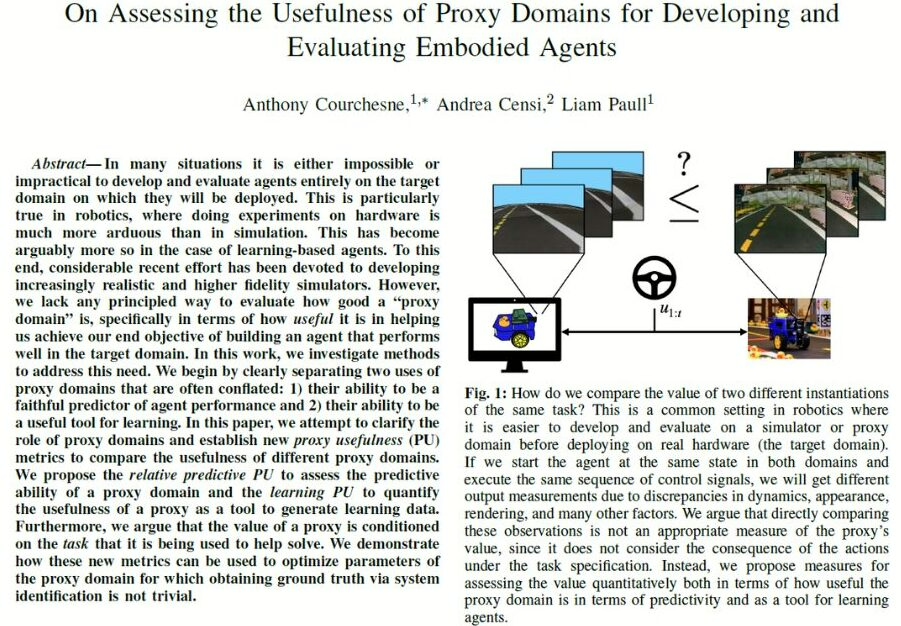
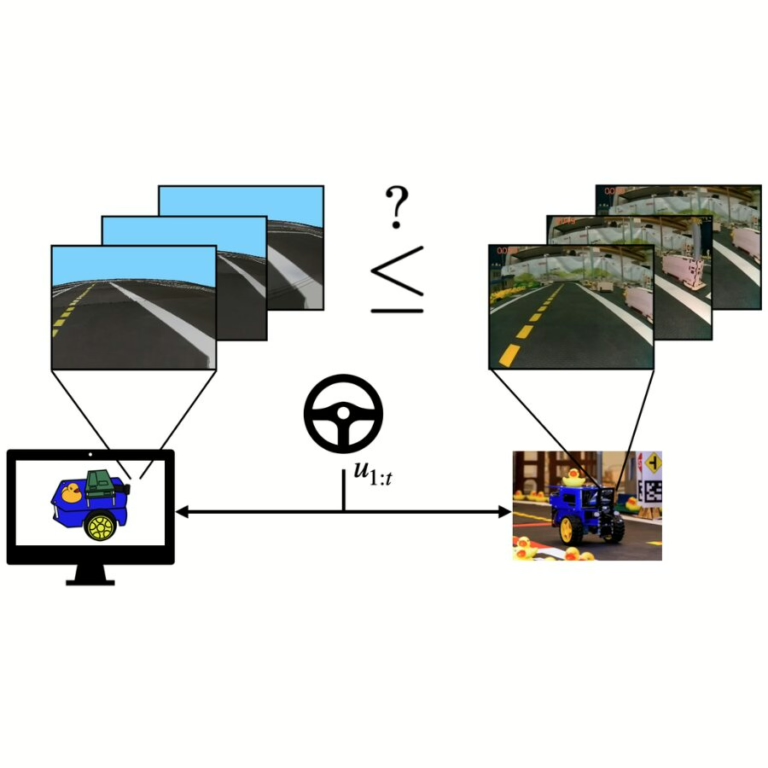
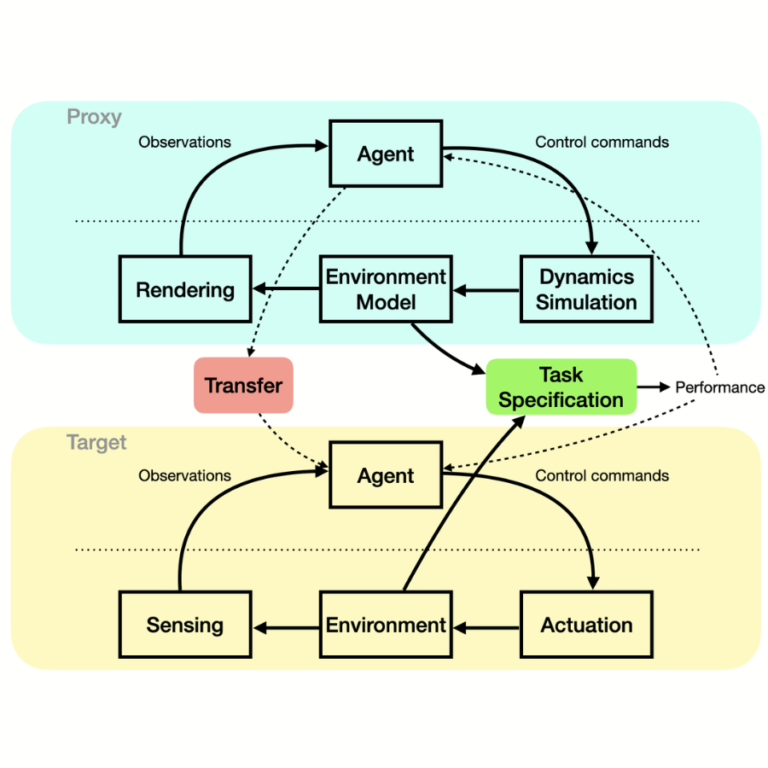
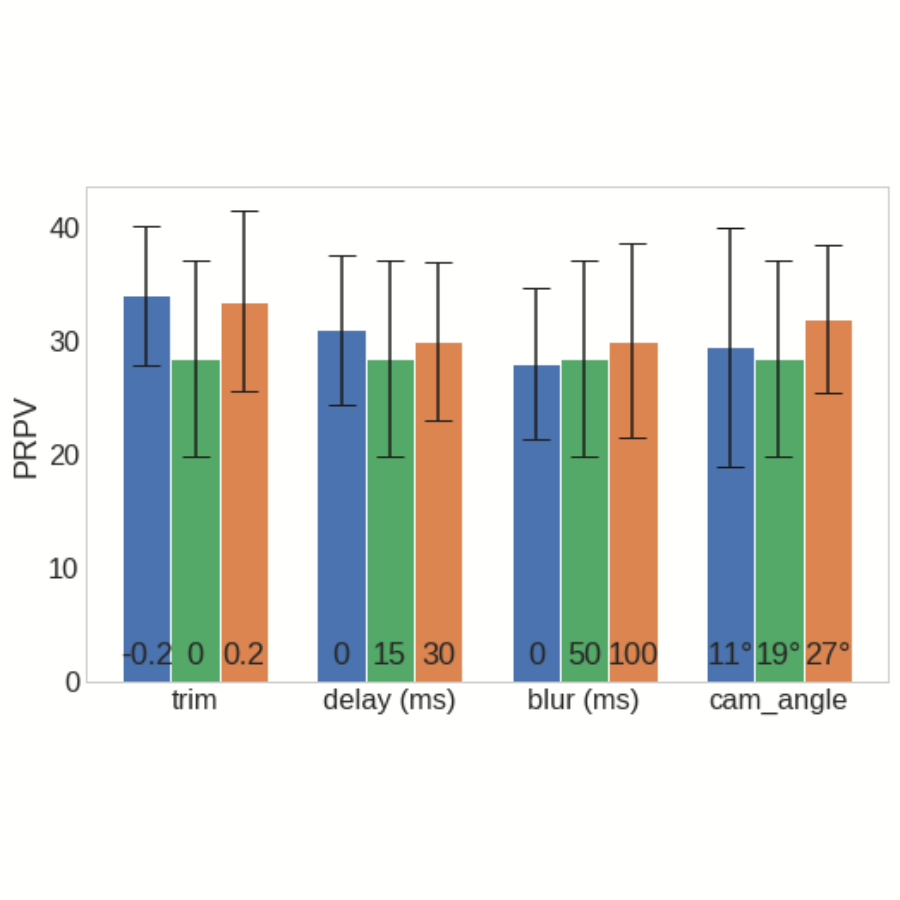
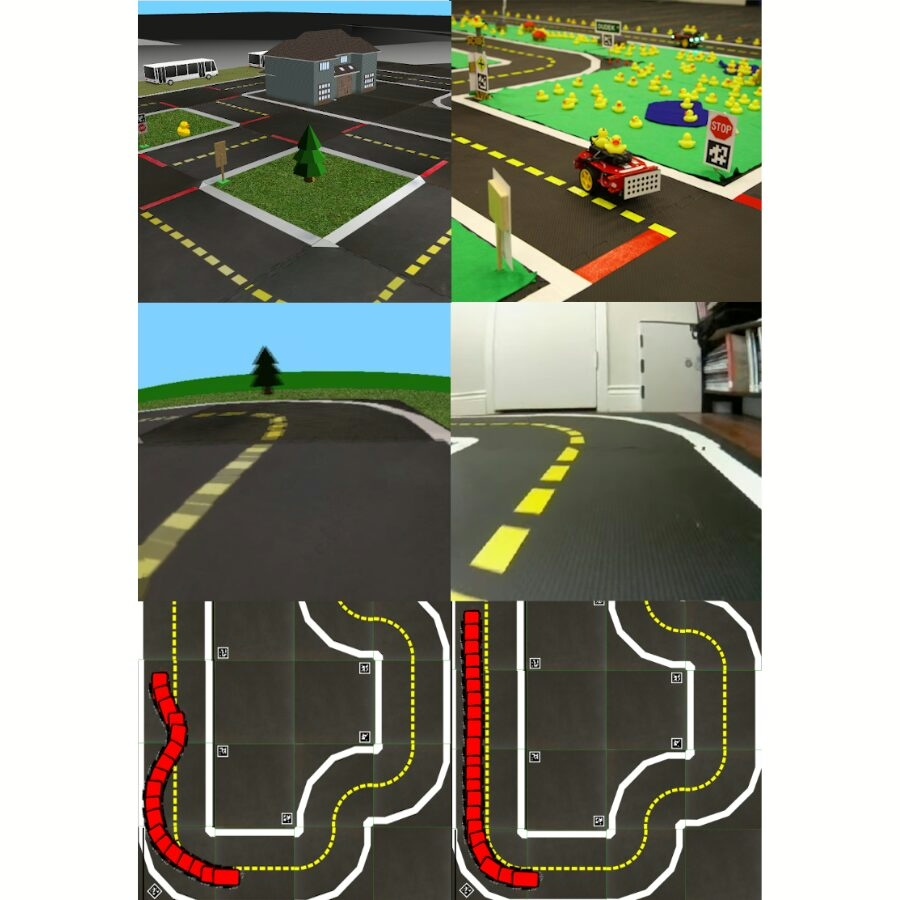
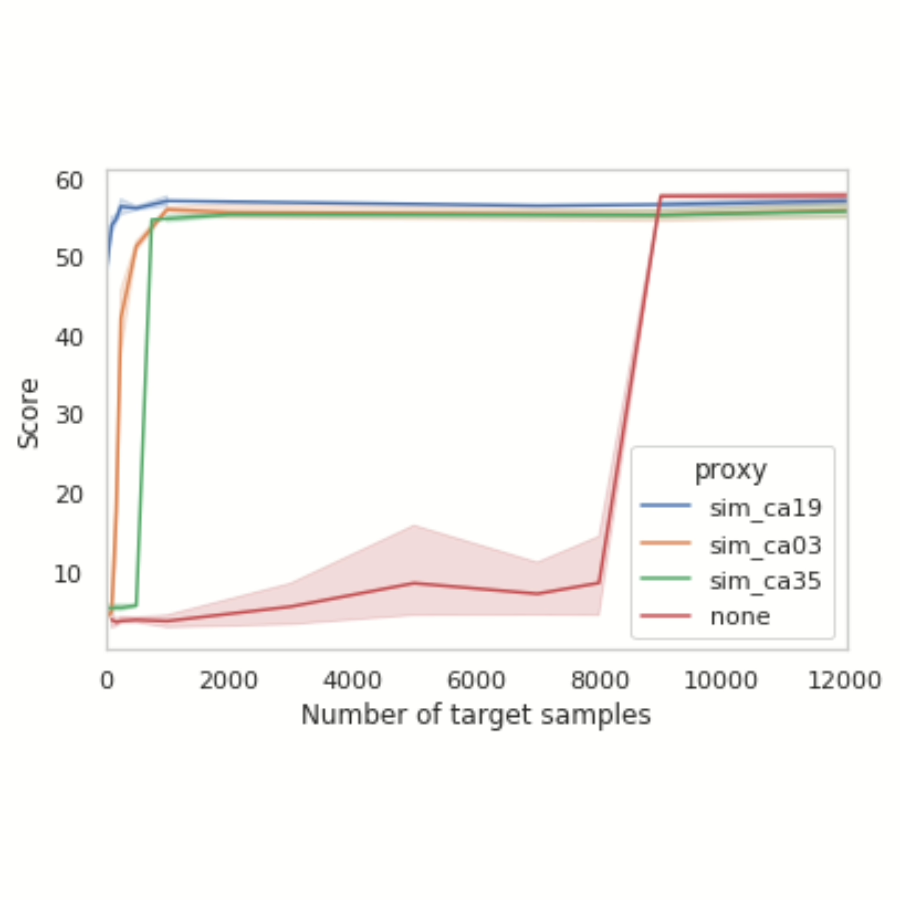
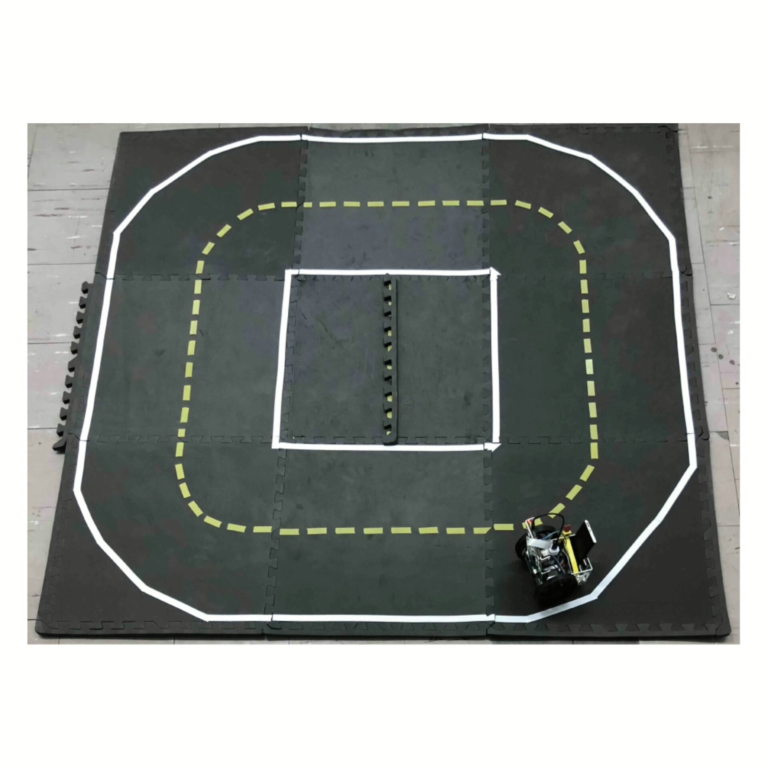
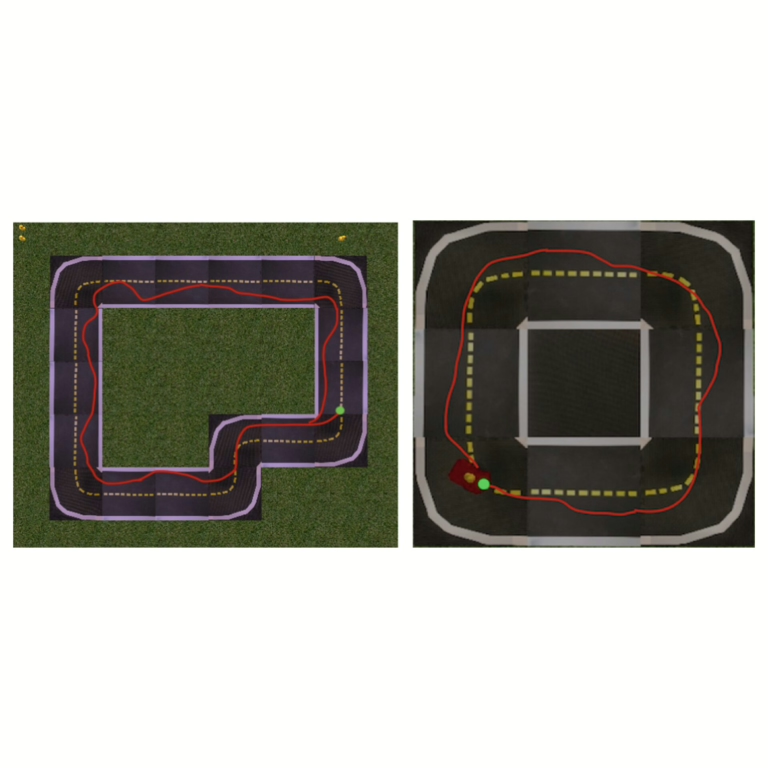
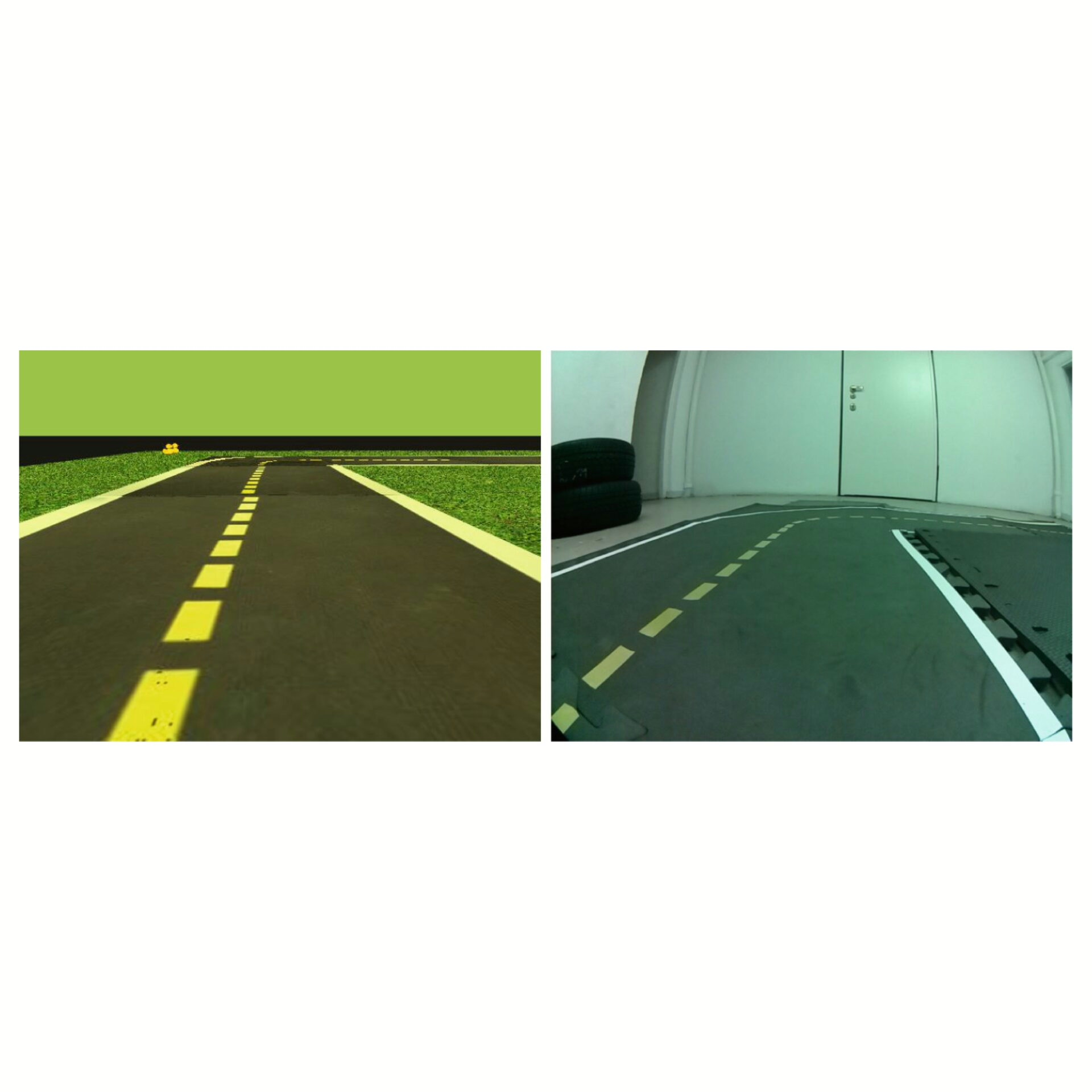
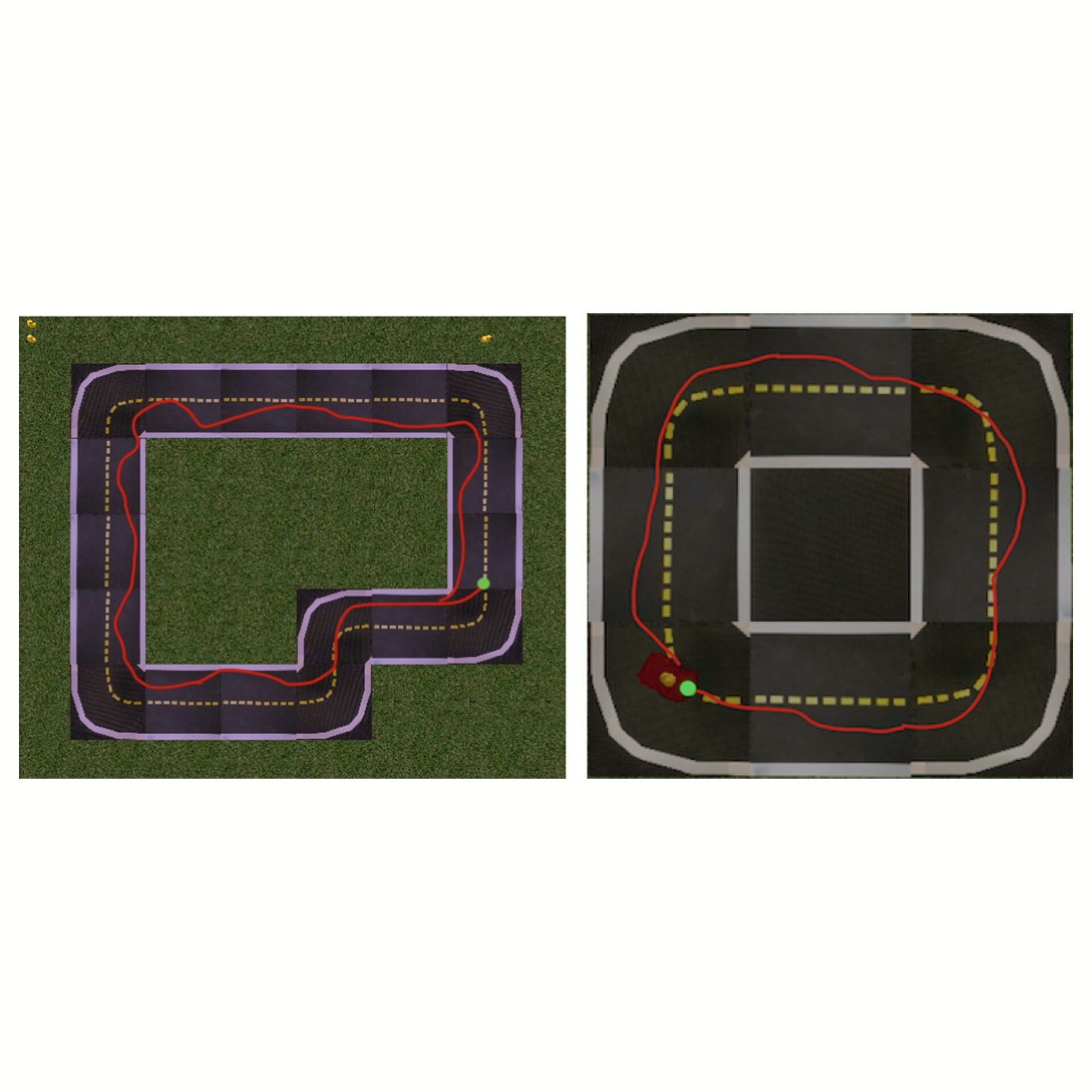
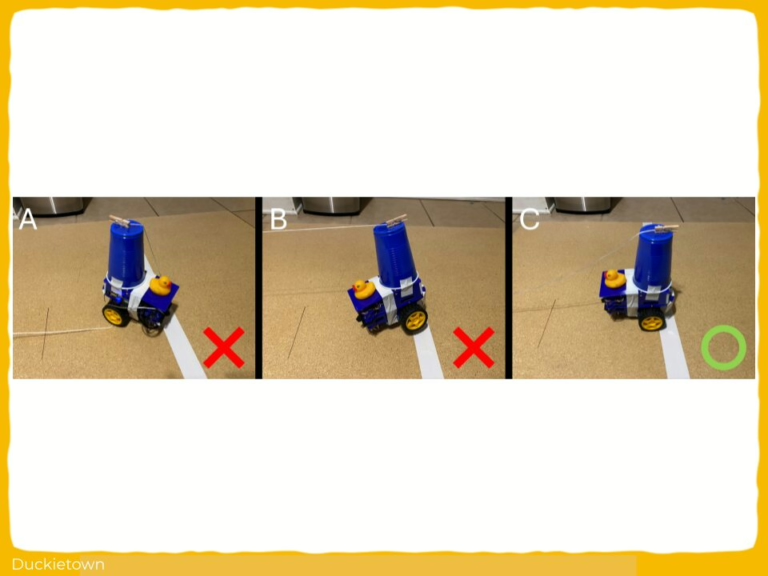
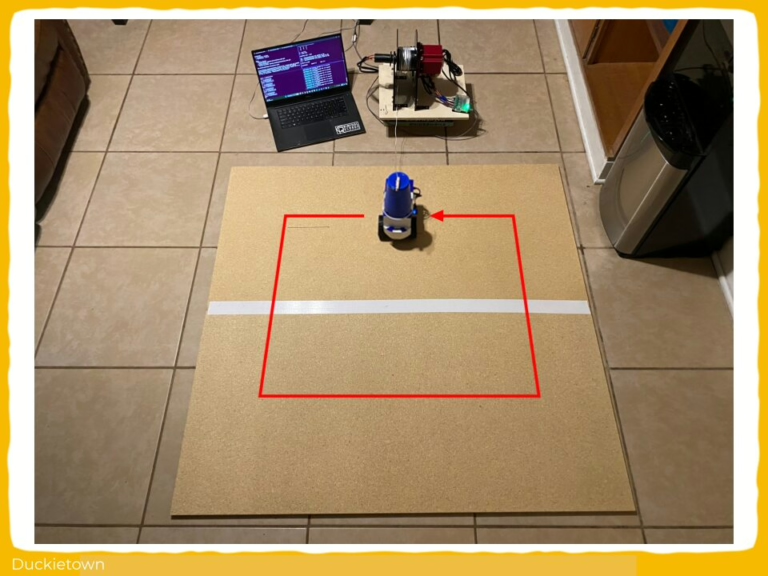
For evaluation purposes, a real robot and a small city model have been built, based on the Duckietown platform specification. This hardware has been used to evaluate in the real world the performance of the system, trained in simulator. Also, additional Transfer Learning techniques were used, in order to adjust the observations and actions in the real robot, due to the differences with simulated environment. Although, the performance in real environment was worse than in simulator, certain trained models were still able to guide the robot around a simple road loop, which shows a potential for such approach. As a result, the use of the simulator greatly reduced the time and effort needed to train the system, and transfer methods were used to deploy it in the real world.
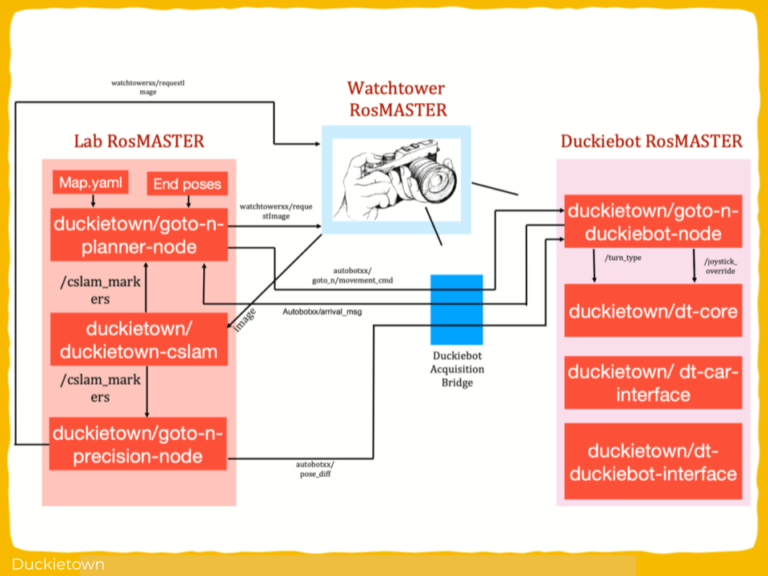
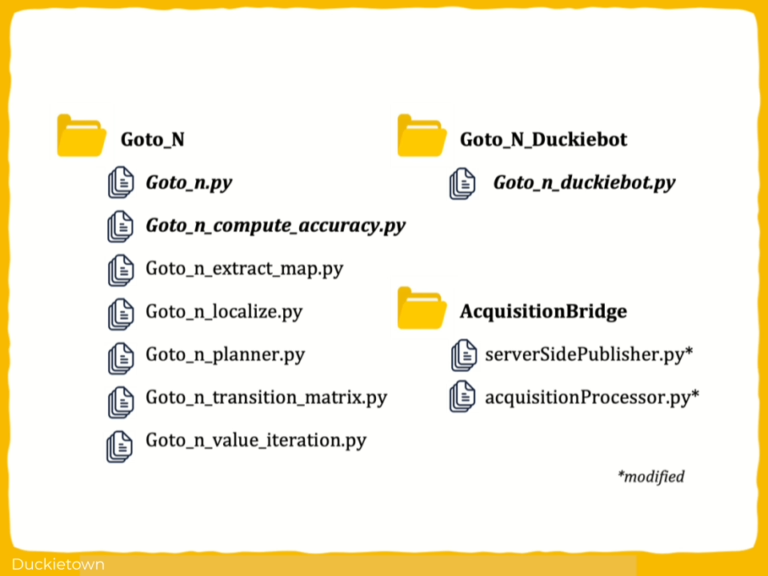
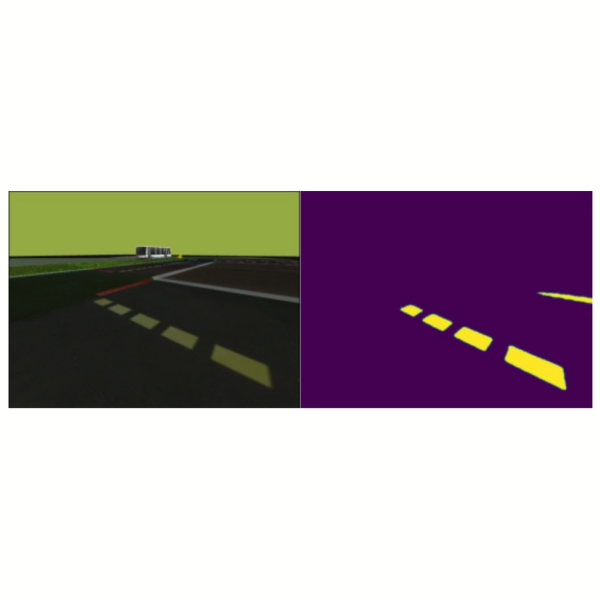
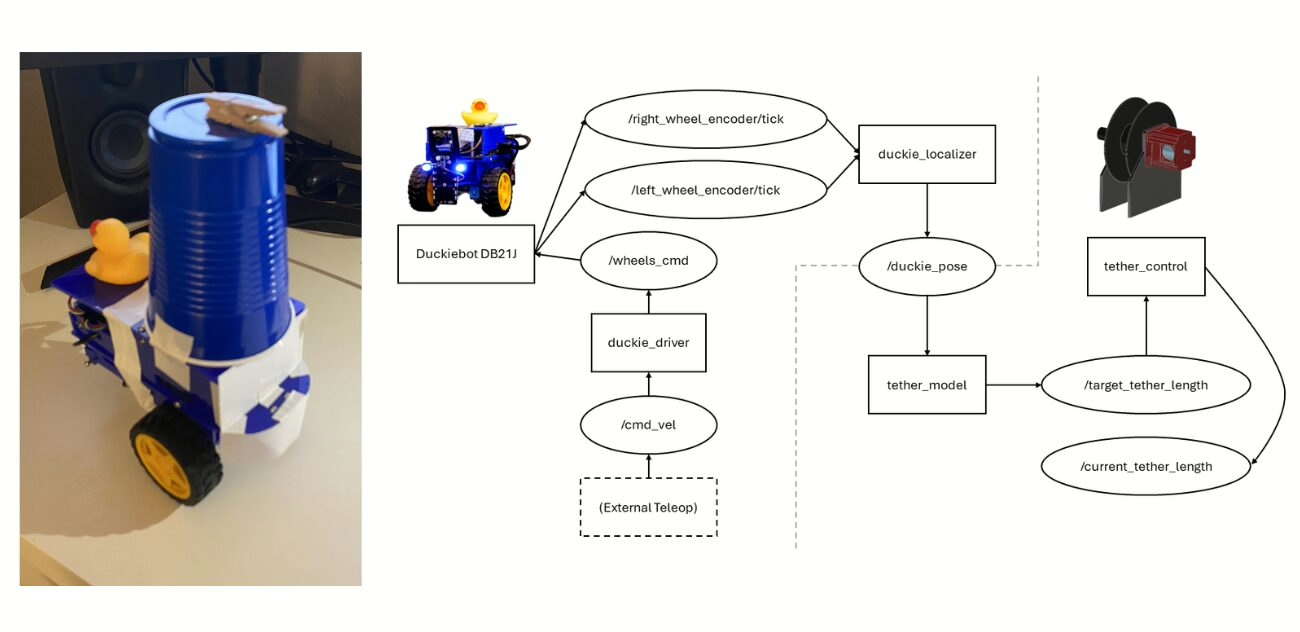
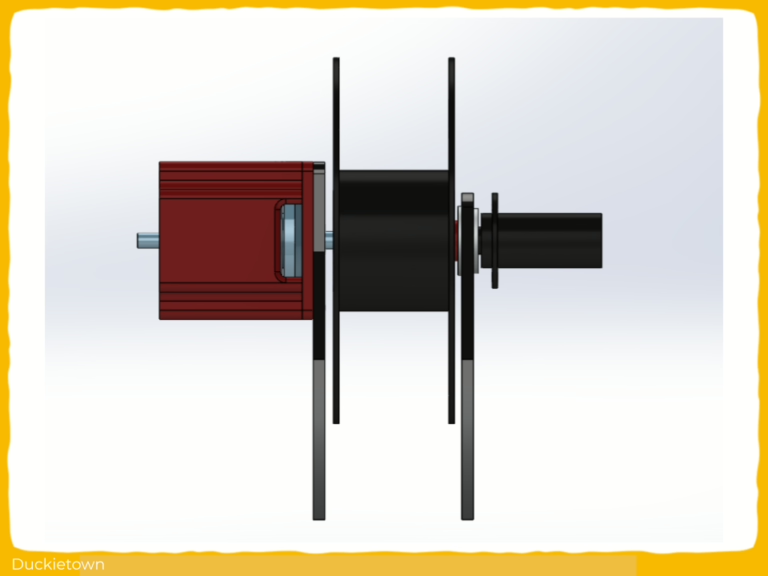
The Duckietown platform provides a baseline, which was modified and refactored to follow the system structure. The simulator and its components are thoroughly documented, the detailed instructions explain how to train and run the robot both in simulation and in real world and evaluate the results. Duckietown provides complete sets of parts, necessary to build the robot and small city, however, it was decided to build custom robot, according to the guidelines. The robot uses a single camera to get observations of the surrounding environment.
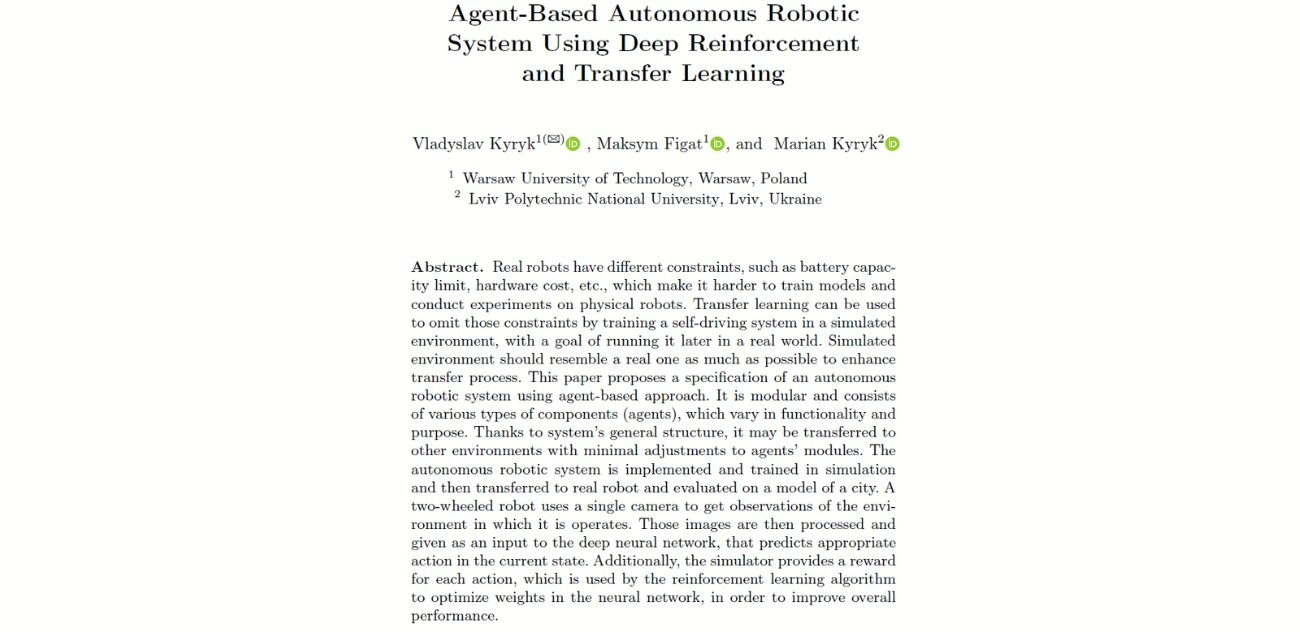
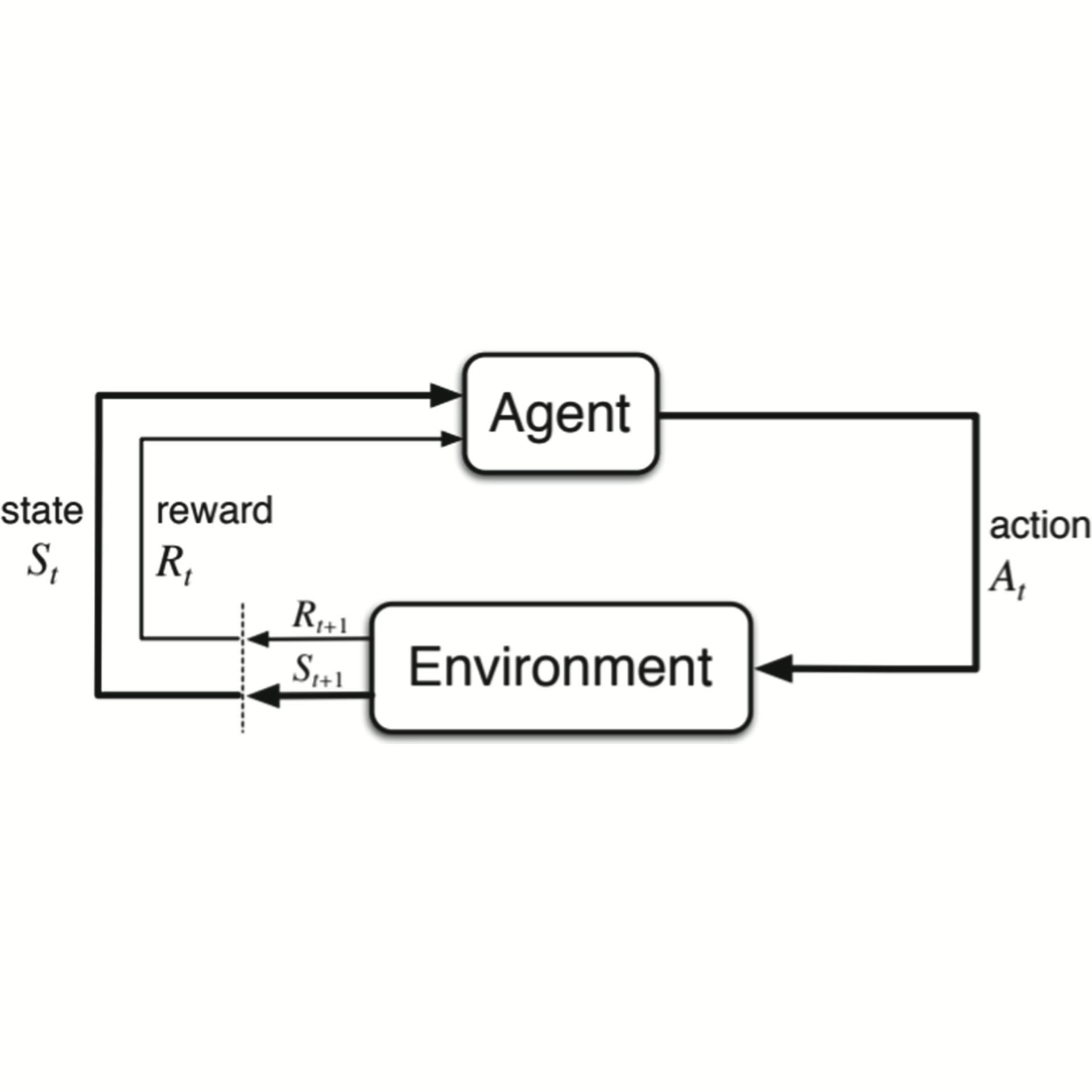
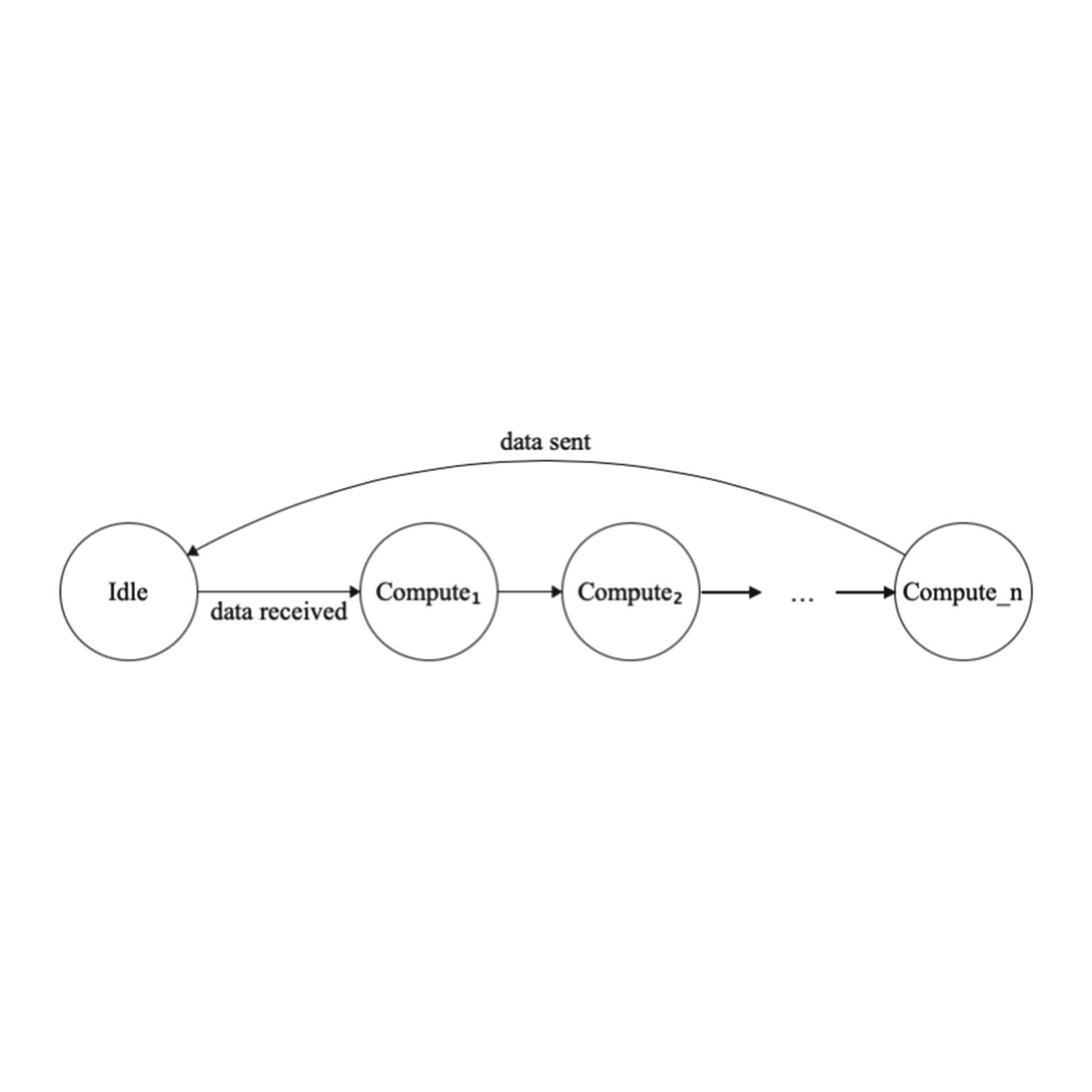
The reinforcement learning algorithm was used to learn a policy, which tries to choose optimal actions based on the those observations with the help of reward function, that provides a feedback for previous decisions. It was possible to significantly reduce the effort required to train a model, thanks to the simulator, as the process does not require constant human supervision and involvement. Such approach proves to be very promising, as the agent learned how to do the lane-following task without any explicit labels, and has shown good performance in the simulated environment. Although, there is still a room for improvement, when it comes to transferring the model to real world, which requires various adaptations and adjustments to be made for The robot to properly execute maneuvers and show stability in its actions.”



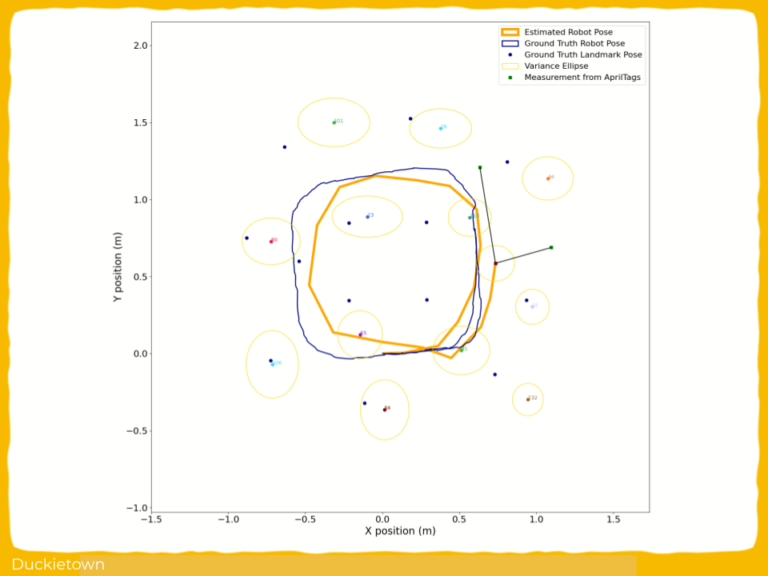











 - Duckietown")
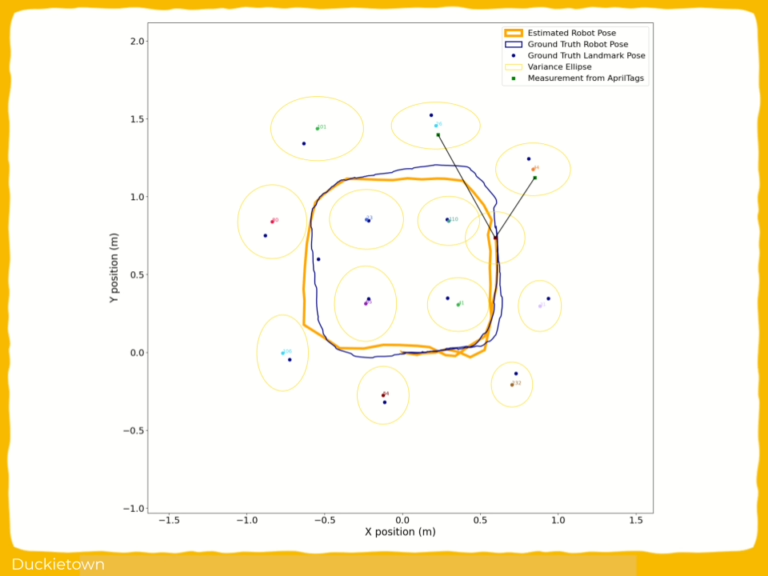
 - Duckietown")
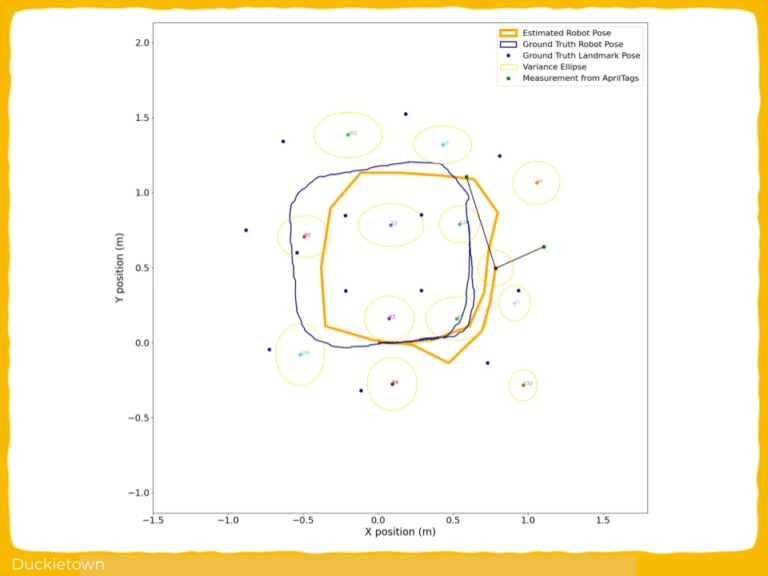
 - Duckietown")