ETHZ, Zurich, March 11, 2022: How Vincenzo discovered his true professional passion as a student using Duckietown.
Learning Autonomy in practice with Vincenzo Polizzi
Vincenzo Polizzi studied robotics, systems and control at the Swiss Federal institute of Technology (ETH Zurich). Vincenzo shares below his experience with Duckietown. Starting off as a student, becoming a Teaching Assistant and onto how he uses Duckietown to power his own research as he moves from academia to industry.
Quick links

Could you tell us something about yourself?
I’m Vincenzo Polizzi , I studied automation engineering at the Politecnico di Milano, and I currently study robotics, systems and control at the Swiss Federal Institute of Technology (ETH Zurich).
You use Duckietown. Could you tell us when you first came into contact with the project, and what attracted you to Duckietown?
Sure! I learned about Duckietown my first year during a master’s program at ETH, where there was a course called: “Autonomous mobility on demand, from car to fleet” where I saw these cars, these robots. And I asked myself “what is this thing?”. It seemed very interesting. The first thing that struck me was that it did not look theoretical, but clearly practical.
"It captures you with simplicity and then you stay for the complexity."
Vincenzo Polizzi
So the idea of a practical aspect interested you?
Yes, during the presentation, it was clear that the course was based on projects the student had to carry out, where one could practice what they had learned theoretically in other classes.
I come from a scientific high school, and I studied automation engineering in Milan. In both my study experiences, I was used to learning concepts theoretically. For example, in the control system for a plant you design on paper in university, you don’t really face the complexity of implementing it on a real object.
I have to say that I have always been very passionate about robotics and informatics. In fact, even in high school, I was building these little robots,I participated in the robotics competition Rome Cup held by Fondazione Mondo Digitale, and there were these robots that were similar in shape to those of Duckietown, but where the scientific content was completely different. So in Duckietown, I saw something similar to what I was doing in my free time. I wanted to see exactly how it was inside, and there I discovered a whole other world that is obviously much more scientific than what a normal high school student could imagine by themself. However, initially I was curious to see a course where one can practice all the knowledge they have gradually acquired. It is not just about writing an equation and finding a solution but making things work.

What is your relationship with Duckietown, how long have you been using it? How do you interact with the Duckietown ecosystem? How do you use it, what do you do with it?
These are interesting questions because I started as a student and then managed to see what’s behind Duckietown. I was attending the course Duckietown held at ETH in 2019. The class was limited to 30 students, I was really excited to be part of it. I met many excellent students there, some of whom I am still in touch with today.
When I started the course, I immediately told myself, “Duckietown is a great thing. If all universities used Duckietown, this would be a better world.” I liked the class a lot, then I also had the opportunity of being a TA. The TAship was an important step because I learned more than during the course. One thing is to live the experience as a student who has to take exams, complete various projects, etc. You need a deeper understanding to organize an activity. You have to take care of all the details and foresee the parts of the exercise that can be harder or simpler for the students. This experience helped me a lot. For example, I did an internship in Zurich where we had to develop a software infrastructure for a drone, and I found myself thinking, “wow this can be done with Duckietown, we can use the same technologies.” I noticed that even in the industry, often we see the use of the same technologies and tools that you can learn about thanks to Duckietown. Of course, maybe a company has its own customized tools, probably well optimized for its products. Perhaps it uses some other specific tool but let’s say you already know more or less what these tools are about. You know because in Duckietown, you have already seen how a robotics system should work and the pieces it is composed of. Duckietown has given me a huge boost with the internship and my Master’s thesis at NASA JPL. Consider that my thesis was on a system of multi drones, so I used, for example, Docker as a tool to simulate the different agents. With Duckietown, I acquired technical knowledge that I used in many other projects, including work.
Do you still use it today?
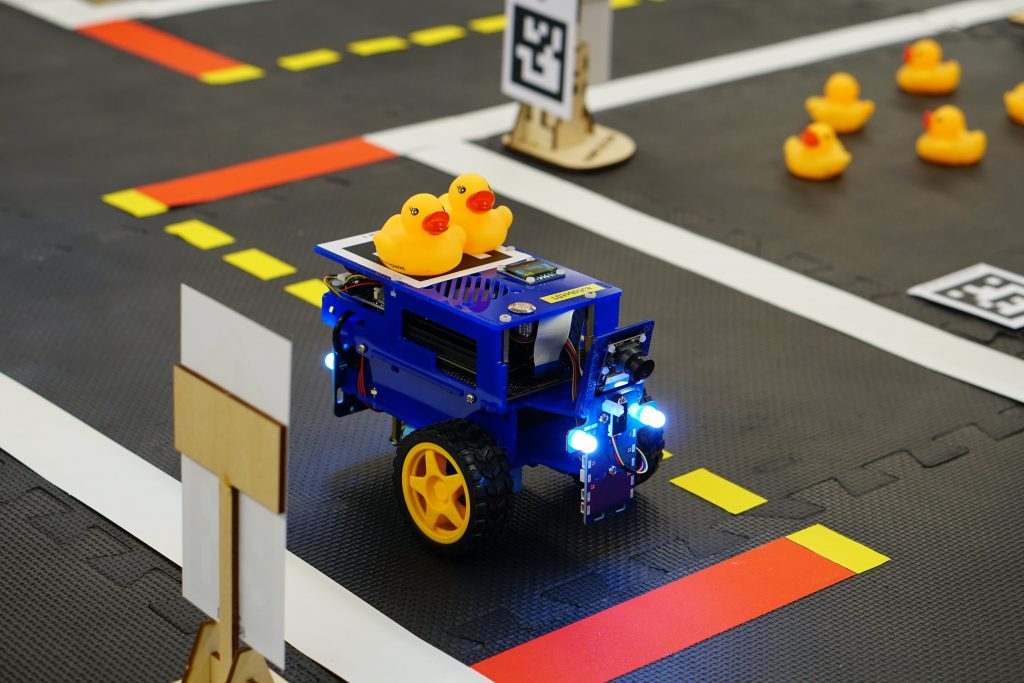
The last project I did with Duckietown is DuckVision. I know we could have thought of a better name. With one of my Duckietowner friends, Trevor Phillips, we enhanced the Duckiebot perception pipeline with another camera, a stereocamera made by Luxonis and Open CV called OAKD (OpenCV AI Kit with depth). This sensor is not just a simple camera, but it also mounts a VPU, Visual Processing Unit. Namely, it can analyze and make inferences on the images that the camera acquires onboard. It can perform object detection and tracking, gesture recognition, semantic segmentation, etc. There are plenty of models freely available online that can run on the OAK-D. We have integrated this sensor in the Duckietown ecosystem, using a similar approach used in the MOOC “Self-Driving Cars with Duckietown”, we created a small series of tutorials where you can just plug the camera on the robot, run our Docker container and have fun! With this project, we passed the first phase of the OpenCV AI Competition 2021. The idea behind the project was to increase the Duckiebot understanding of the environment, by using the depth information, the robot can have a better representation of its surroundings and so, for example, a better knowledge of its position. Also, in our opinion, the OAK-D in Duckietown can boost the research in autonomous vehicles and perception.
I would like to add something about the use of Duckietown, I have seen this project both as a student and from behind the scenes and I really understood that by using this platform you really learn a lot of things that are useful not only in the academic field but can also be very useful in the working environment with the practical knowledge that is often difficult to acquire during school. And in this regard I thought then given my history, I am Sicilian but I studied in Milan and then I went to Zurich, I asked myself what can I bring as a contribution of my travels, so I thought about using Duckietown in some universities here in Sicily in the universities of Palermo and Messina. And also, at the Polytechnic of Milan, for example, they have already begun to use it and have participated in the AIDO and have also placed well, they ended up among the finalists, so there is a lot of interest in this project.
Did you receive a positive response every time you proposed Duckietown?
Yes, and then there is a huge enthusiasm on the part of the students. I spoke with student associations first, then with the professors etc. but when the students see Duckietown for the first time, they are always really enthusiastic about using it.
"There is something that captures you in some way, and then just opens up a world when you start to actually see how all the systems are implemented. This is the nice thing in my opinion, you can decide the level of complexity you want to achieve."
Vincenzo Polizzi
The duck was a great idea!
Absolutely right! The duck was a great idea, yes. I like contrasts, you see a super simple friendly thing that hides a state-of-the-art robotics platform. Even in the students I saw this reaction, because the duck is the first thing you see, it looks like a game, something to play with, this is the first impact, then when you start you get curious. It captures you with simplicity and then you stay for the complexity.
Would you suggest Duckietown to friends and colleagues?
Sure! There is something that captures you and opens up a world when you start to see how all the systems are implemented. This is the nice thing in my opinion, you can decide the level of complexity you want to achieve. It’s a platform that looks like something to play with, a game or something, but in reality there is a huge potential, in terms of knowledge that everyone can acquire, it’s something that you can not easily find elsewhere. I also think it offers great support, such as educational material, exercises that are of high quality. You can learn a lot of different aspects of robotics, in my opinion. You can do control, you can do the machine learning part, perception . There’s really a world to explore. You can see everything there is about robotics. But you can also just focus on one aspect that maybe you’re more passionate about. So yes, I would recommend it because you can learn a lot, and as a student myself I would recommend it to my fellow colleagues.
Learn more about Duckietown
The Duckietown platform offers robotics and AI learning experiences.
Duckietown is modular, customizable and state-of-the-art. It is designed to teach, learn, and do research: from exploring the fundamentals of computer science and automation to pushing the boundaries of knowledge.
Tell us your story
Are you an instructor, learner, researcher or professional with a Duckietown story to tell? Reach out to us!

 ,
, ), except for
), except for