What’s your relationship with Duckietown today? Like, do you use it in particular for some activities, your daily work or some project?
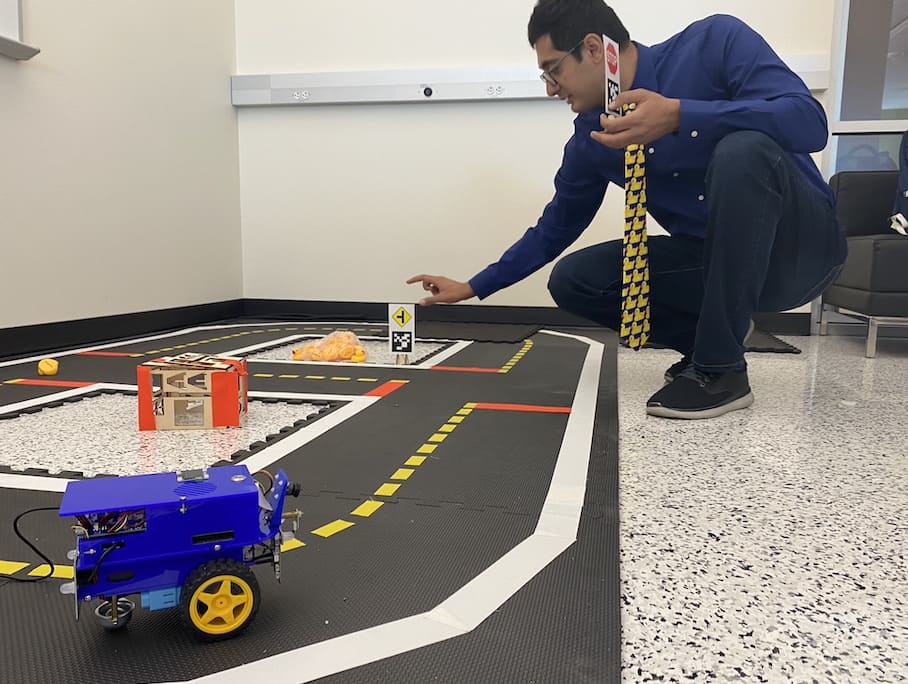
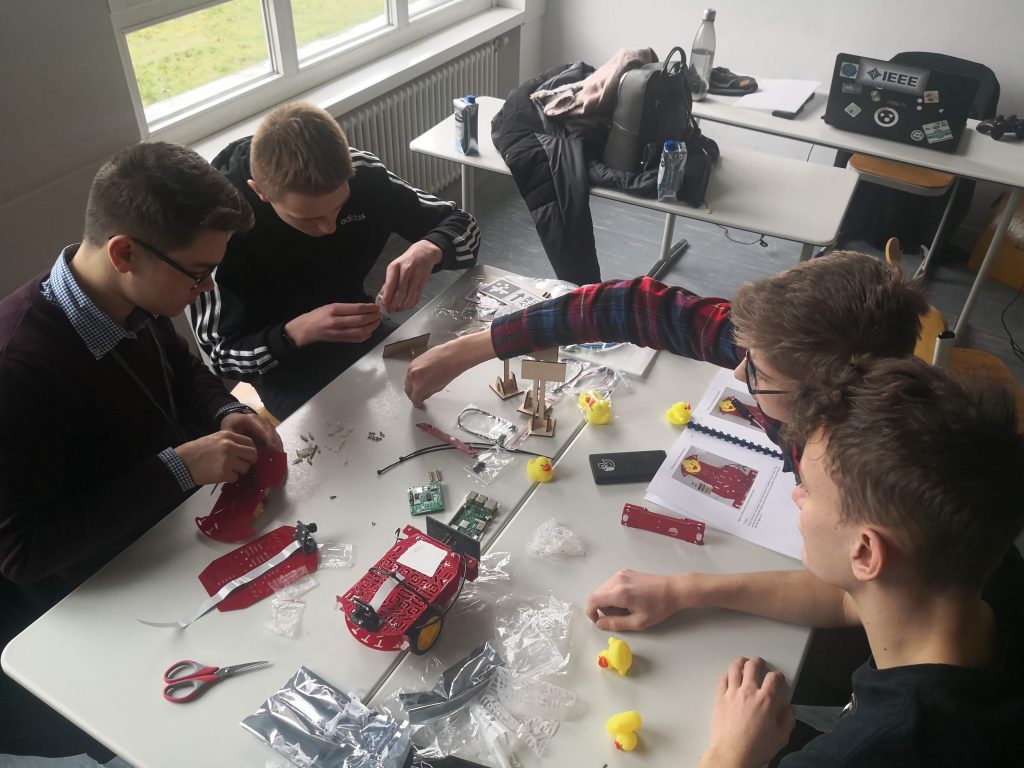
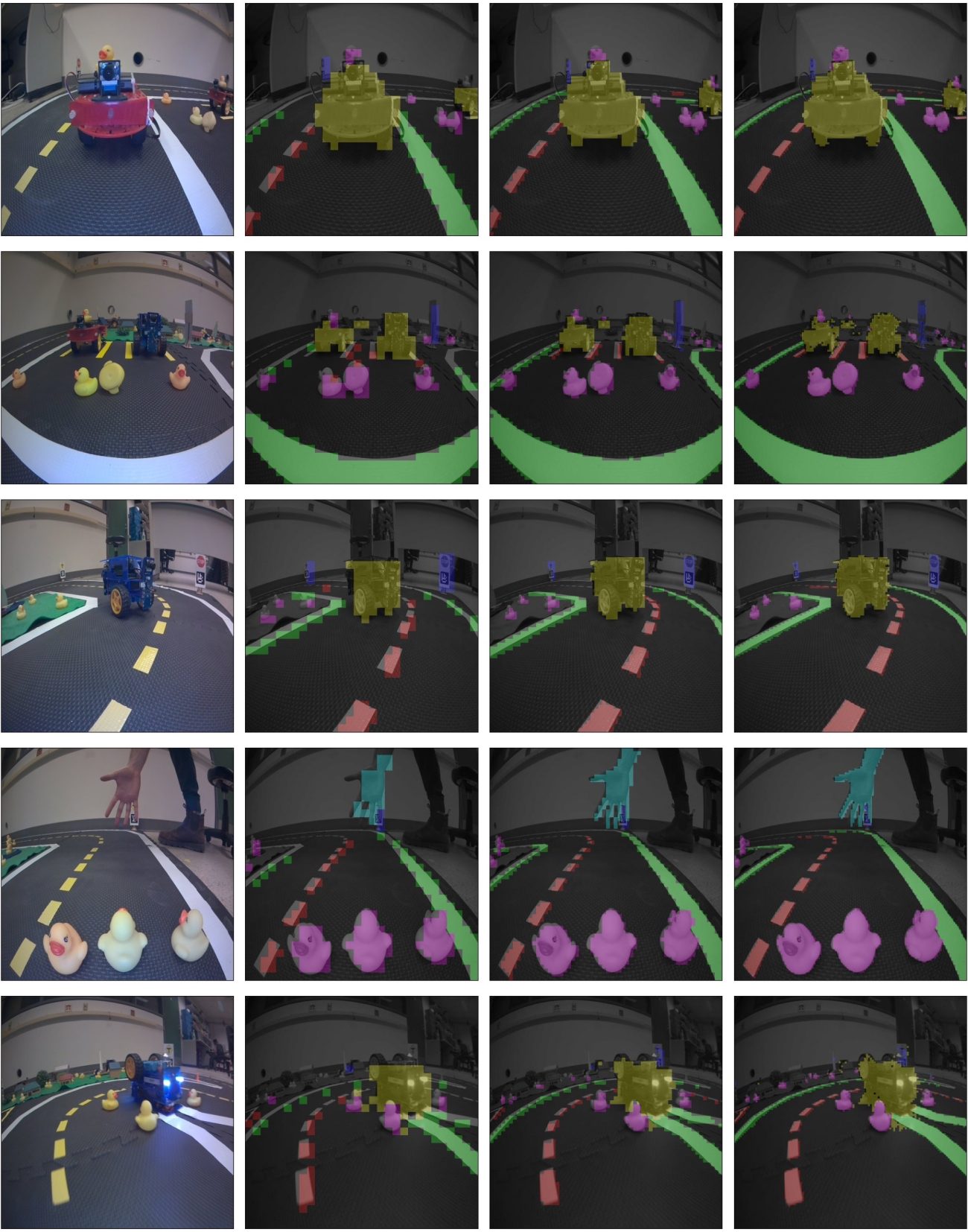
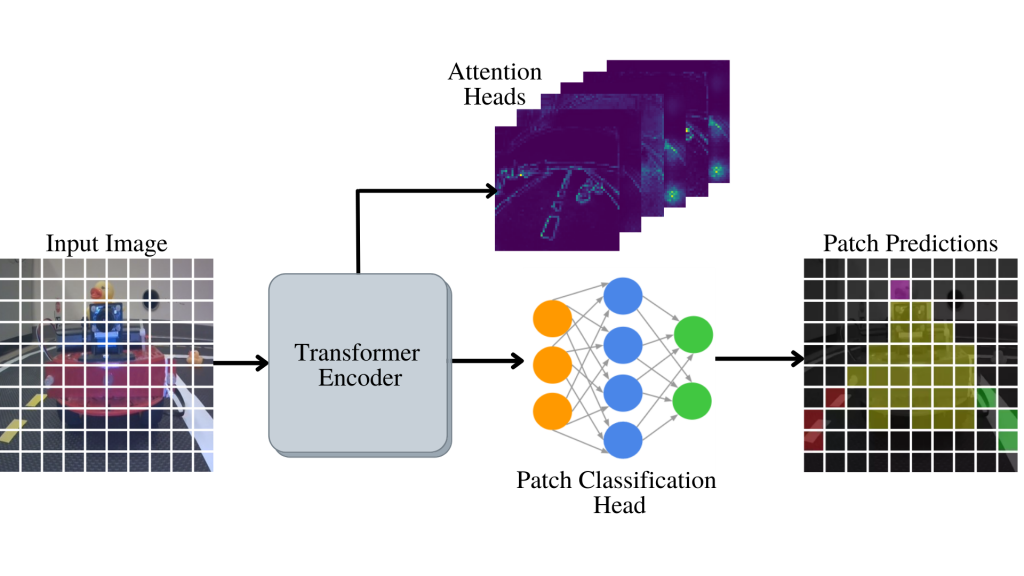
Yeah, for sure. I guess I use it in a number of ways. Maybe the first way is that I teach a class every fall called autonomous vehicles, Where the Duckietown platform is the platform that we use for the experiments and labs in the class. So just like the original class, Every student gets a robot that they assemble, and then we learn about computer vision and autonomous driving and all the good stuff related to robotics. But I also use the platform for some amount of research. Also in my group, I believe that there’s a lot of interesting research directions that come from a kind of standardized, small scale, accessible autonomous driving platform like this. Recently, most of the work that we’ve been doing in terms of research has been about training agents in simulation and then deploying them in the real world. So this isa nice setup for that because we have a simulator that’s very easy, fast and lightweight to train in, and then we have the environment that’s also really accessible. So, yeah, so we’ve been doing some research on that front.