AI-DO 5 pre-finals update
With the fifth edition of the AI Driving Olympics finals day approaching, 1326 solutions submitted from 94 competitors in three challenges, it is time to glance over at the leaderboards!
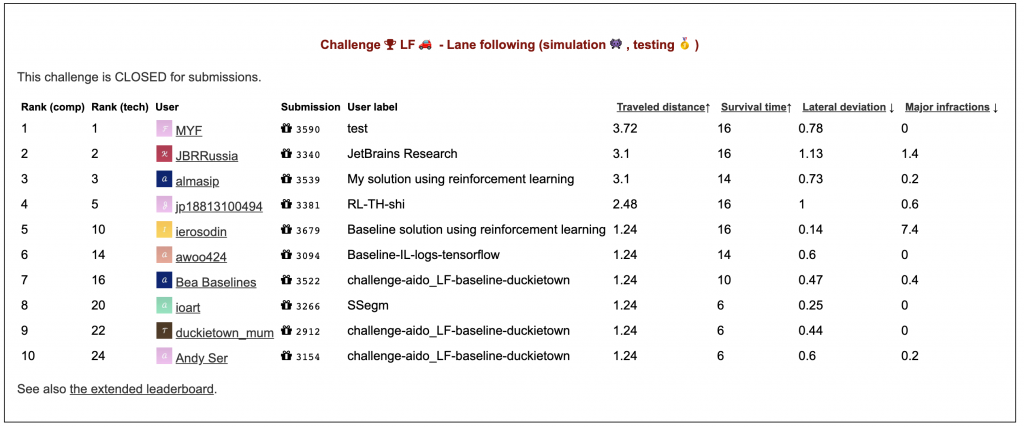
Leaderboards updates
This year’s challenges are lane following (
LF), lane following with pedestrians (LFP) and lane following with other vehicles, multibody (LFV_multi). Learn more about the challenges here.
Each submission can be sent to multiple challenges.
Let’s look at some of the most promising or interesting submissions. The Montréal menace
Raphael Jean at Mila / University of Montréal is a new entrant for this year.
An interesting submission: submission #12962
The submissions from the cold
Team JetBrains from Saint Petersburg was a winner of previous editions of AI-DO. They have been dominating the leaderboards also this year.
Interesting submissions: submission #12905
All of JetBrains submissions: JBRRussia1.
BME Conti
PhD student Robert Moni (BME-Conti) from Hungary.
Interesting submissions: submission #12999
All submissions: timur-BMEconti
Deadline for submissions
The deadline for submitting to the AI-DO 5 is 12am EST on Thursday, December 10th, 2020. The top three entries (more if time allows) in each simulation challenge will be evaluated on real robots and presented at the finals event at NeurIPS 2020, which happens at 5pm EST on Saturday, December 12.