This year’s challenges were lane following (LF), lane following with pedestrians (LFP) and lane following with other vehicles, multibody (LFV_multi).
Let’s find out the results in each category:
LF
Andras Beres 🇭🇺
Zoltan Lorincz 🇭🇺
András Kalapos 🇭🇺
LFP
Bea Baselines 🐤
Melisande Teng 🇨🇦
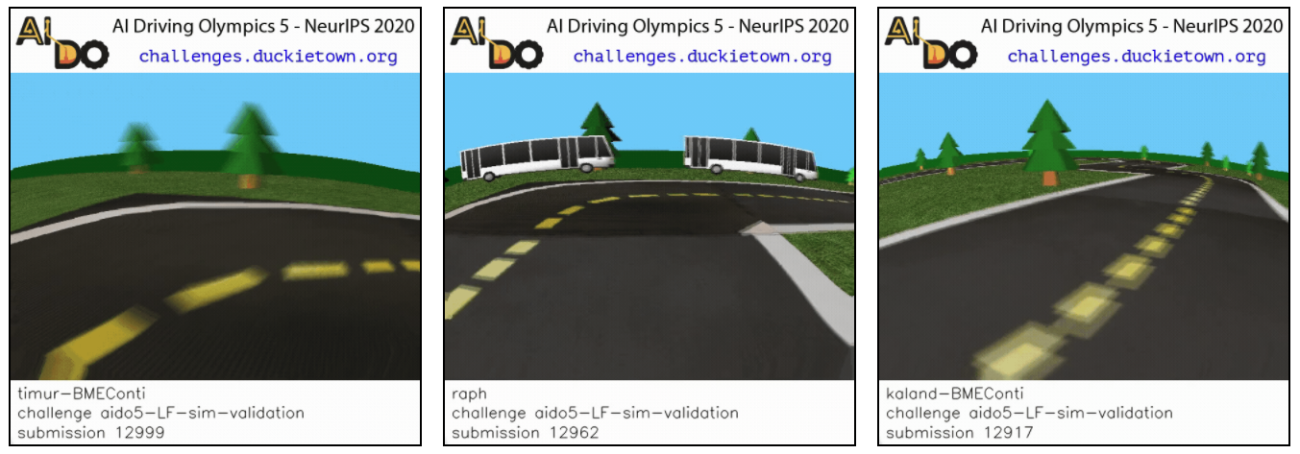
Raphael Jean 🇨🇦
LFV_multi
Robert Moni 🇭🇺
Márton Tim 🇭🇺
Anastasiya Nikolskay 🇷🇺
Congratulations to the Hungarian Team from the Budapest University of Technology and Economics for collecting the highest rankings in the urban league!
Here’s how the winners in each category performed both in the qualification (simulation) and in the finals running on real hardware:
Great participation and results in the Advanced Perception league! Check out this year’s winners in the video below:
AI-DO 5 sponsors
Many thanks to our amazing sponsors, without which none of this would have been possible!
Stay tuned for next year AI Driving Olympics. Visit the AI-DO page for more information on the competition and to browse this year’s introductory webinars, or check out the Duckietown massive open online course (MOOC) and prepare for next year’s competition!
With the fifth edition of the AI Driving Olympics finals day approaching, 1326 solutions submitted from 94 competitors in three challenges, it is time to glance over at the leaderboards!
Leaderboards updates
This year’s challenges are lane following (LF), lane following with pedestrians (LFP) and lane following with other vehicles, multibody (LFV_multi). Learn more about the challenges here.
Each submission can be sent to multiple challenges.
Let’s look at some of the most promising or interesting submissions.
The Montréal menace
Raphael Jean at Mila / University of Montréal is a new entrant for this year.
The deadline for submitting to the AI-DO 5 is 12am EST on Thursday, December 10th, 2020. The top three entries (more if time allows) in each simulation challenge will be evaluated on real robots and presented at the finals event at NeurIPS 2020, which happens at 5pm EST on Saturday, December 12.
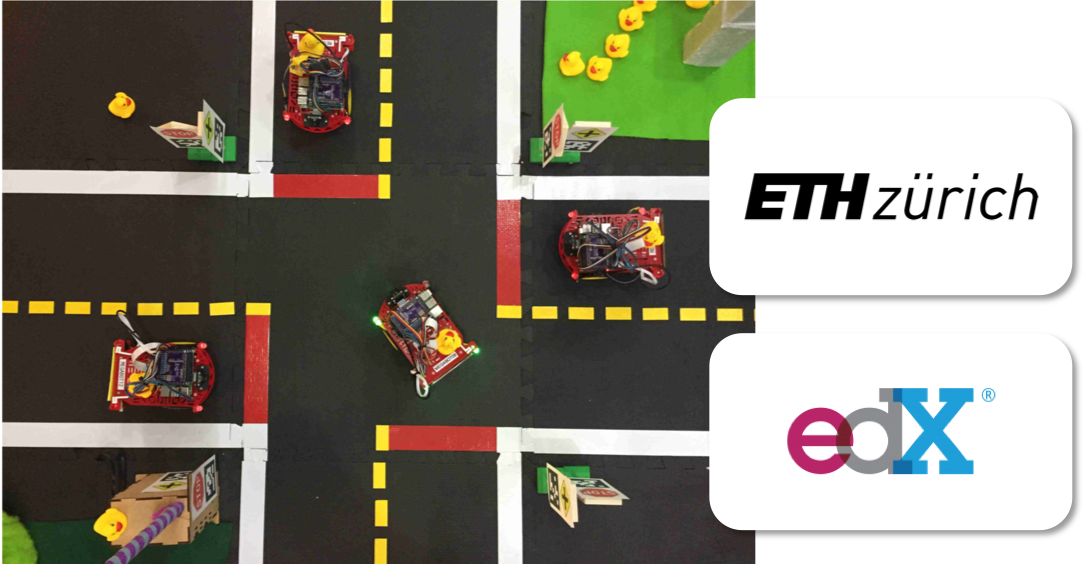
This course is made possible thanks to the support of the Swiss Federal Institute of Technology in Zurich (ETHZ), in collaboration with the University of Montreal, the Duckietown Foundation, andthe Toyota Technological Institute at Chicago.
This course combines remote and hands-on learning with real-world robots. It is offered on edX, the trusted platform for learning, and it is now open for enrollment.
Learning activities will support the use ofJetson Nano equipped Duckiebots, powered by NVIDIA.
Participants will engage in software and hardware hands-on learning experiences, with focus on overcoming the challenges of deploying autonomous robots in the real world.
This course will explore the theory and implementation of model- and data-driven approaches for making a model self-driving car drive autonomously in an urban environment.
Teaching autonomy requires a fundamentally different approach when compared to other computer science and engineering disciplines, because it is multi-disciplinary. Mastering it requires expertise in domains ranging from fundamental mathematics to practical machine-learning skills.
Robot Perception
Robots operate in the real world, and theory and practice often do not play well together. There are many hardware platforms and software tools, each with its own strengths and weaknesses. It is not always clear what tools are worth investing time in mastering, and how these skills will generalize to different platforms.
Duckiebot Detection
Learning through challenges
Progressing through behaviors of increasing complexity, participants uncover concepts and tools that address the limitations of previous approaches. This allows to get Duckiebots to actually do things, while gradually re-iterating concepts through various technical frameworks. Simulation and real-world experiments will be performed using a Python, ROS, and Docker based software stack.
The 5th edition of the Artificial Intelligence Driving Olympics (AI-DO 5) has officially started!
The AI-DO serves to benchmark the state of the art of artificial intelligence in autonomous driving by providing standardized simulation and hardware environments for tasks related to multi-sensory perception and embodied AI.
Duckietown hosts AI-DO competitions biannually, with finals events held at machine learning and robotics conferences such as the International Conference on Robotics and Automation (ICRA) and the Neural Information Processing Systems (NeurIPS).
The most traditional of AI-DO challenges: have a Duckiebot navigate a road loop without intersection, pedestrians (duckies) or other vehicles. The objective is traveling the longest path in a given time while staying in the lane.
The LFP challenge is new to AI-DO. It builds upon LF by introducing static obstacles (duckies) on the road. The objectives are the same as for lane following, but do not hit the duckies!
In this traditional AI-DO challenge, contestants seek to travel the longest path in a city without intersections nor pedestrians, but with other vehicles on the road. Except this year there’s a twist. In this year’s novel multi-body variant, all vehicles on the road are controlled by the submission.
Getting started: the webinars
We offer a short webinar series to guide contestants through the steps for participating: from running our baselines in simulation as well as deploying them on hardware. All webinars are 9 am EST and free!
Introduction
Learn about the Duckietown project and the Artificial Intelligence Driving Olympics.
Nov. 9, 2020
ROS baseline
How to run and build upon the “traditional” Robotic Operation System (ROS) baseline.
Nov. 11, 2020
Local development
On the workflow for developing and deploying to Duckiebots, for hardware-based testing.
Nov. 13, 2020
RL baseline
Learn how to use the Pytorch template for reinforcement learning approaches.
Nov. 16, 2020
IL baseline
Introduction to the Tensorflow template, use of logs and simulator for imitation learning.
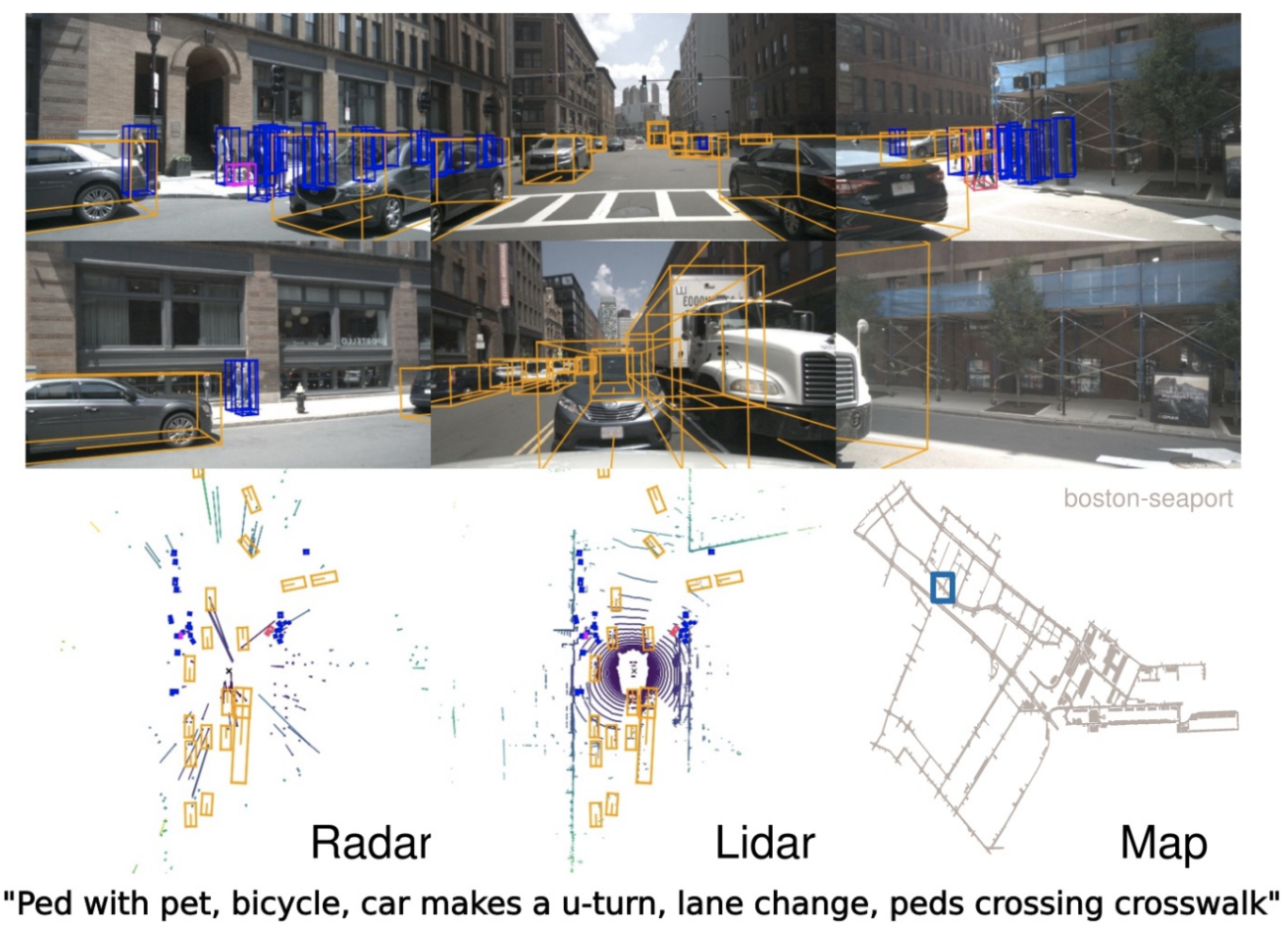
Previous AI-DO editions featured: detection, tracking and prediction challenges around the nuScenes dataset.
For the 5th iteration of AI-DO we have a brand new lidar segmentation challenge.
The challenge is based on the recently released lidar segmentation annotations for nuScenes and features an astonishing 1,400,000,000 lidar points annotated with one of 32 labels.
Furthermore, due to popular demand, we will organize the 3rd iteration of the nuScenes 3d detection challenge. Please see https://www.nuscenes.org/object-detection for more details.
AI-DO 5 Finals event
The AI-DO finals will be streamed LIVE during 2020 edition of the Neural Information Processing Systems (NeurIPS 2020) conference in December.
What a start for IROS 2020 with the "Benchmarking Progress in Autonomous Driving" workshop!
The 2020 edition of the International Conference on Intelligent Robots and Systems (IROS) started great with the workshop on “Benchmarking Progress in Autonomous Driving”.
The workshop was held virtually on October 25th, 2020, using an engaging and concise format of a sequence of four 1.5-hour moderated round-table discussions (including an introduction) centered around 4 themes.
The discussions on the methods by which progress in autonomous driving is evaluated, benchmarked, and verified were exciting. Many thanks to all the panelists and the organizers!
Here are the videos of the various sessions.
Opening remarks
Theme 1: Assessing progress for the field of autonomous vehicles (AVs)
The workshop is structured into 4 panels around four themes.
Assessing Progress for the Field of Autonomous Driving
How to evaluate AV risk from the perspective of real world deployment (public acceptance, insurance, liability, …)?
Best practices for AV benchmarking
Algorithms and Paradigms
The workshop will take place on Oct. 25, 2020 starting at 10am EDT.
Invited Panelists
We have a list of excellent invited panelists from academia, industry, and regulatory organizations. These include:
Emilio Frazzoli (ETH Zürich / Motional)
Alex Kendall (Wayve)
Jane Lappin (National Academy of Sciences)
Bryant Walker Smith (USC Faculty of Law)
Luigi Di Lillo (Swiss Re Insurance),
John Leonard (MIT)
Fabio Bonsignorio (Heron Robots)
Michael Milford (QUT)
Oscar Beijbom (Motional)
Raquel Urtasun (University of Toronto / Uber ATG).
Please join us...
Please join us on October 25, 2020 starting at 10am EST for what should be a very engaging conversation about the difficult issues around benchmarking progress in autonomous vehicles.
We are excited to announce the launch of the AI-DO 3, which will culminate in a live competition event to be held at NeurIPS this Dec. 13-14.
The AI-DO is a global robotics competition that comprises a series of events based on autonomous driving. This year there are three events, urban (Duckietown), advanced perception (nuScenes), and racing (AWS Deepracer). The objective of the AI-DO is to engage people from around the world in friendly competition, while simultaneously benchmarking and advancing the field of robotics and AI.
In collaboration with the RoboCup Federation, the Duckietown Foundation will be offering workshops at RoboCup 2019 in Sydney, Australia, providing a hands-on introduction to the Duckietown platform.
We will be hosting three one-day workshops as part of RoboCup 2019 from July 4-6, 2019 for teachers, students, and independent learners who are interested in finding out more about the Duckietown platform. Attendance is completely free and everyone is welcome to apply, even if you are not participating in RoboCup.
There are no formal requirements, though basic familiarity with GNU/Linux and shell usage is recommended.
If you would like to apply to attend a workshop, please complete this form.
We will have Duckiebots and Duckietowns for participants to use. However, you are more than welcome to bring your own Duckiebots, available for purchase at https://get.duckietown.com.
We will be hosting three one-day workshops as part of RoboCup 2019 from July 4-6, 2019 for teachers, students, and independent learners who are interested in finding out more about the Duckietown platform. Attendance is completely free and everyone is welcome to apply, even if you are not participating in RoboCup. There are no formal requirements, though basic familiarity with GNU/Linux and shell usage is recommended.
If you would like to apply to attend a workshop, please complete this form.
We will have Duckiebots and Duckietowns for participants to use. However, you are more than welcome to bring your own Duckiebots, available for purchase at https://get.duckietown.com.
Team JetBrains came out on top on all 3 challenges
It was a busy (and squeaky) few days at the International Conference on Robotics and Automation in Montreal for the organizers and competitors of the AI Driving Olympics.
The finals were kicked off by a semifinals round, where we the top 5 submissions from the Lane Following in Simulation leaderboard. The finalists (JBRRussia and MYF) moved forward to the more complicated challenges of Lane Following with Vehicles and Lane Following with Vehicles and Intersections.
Results from the AI-DO2 Finals event on May 22, 2019 at ICRA
If you couldn’t make it to the event and missed the live stream on Facebook, here’s a short video of the first run of the JetBrains Lane Following submission.
Thanks to everyone that competed, dropped in to say hello, and cheered on the finalists by sending the song of the Duckie down the corridors of the Palais des Congrès.
A few pictures from the event
the validation tracks
Team meeting
Competitors at work
DuckiePond
Duckietown Junior
A young Forbes roboticist
Street name matching game!
Street name matching game!
Street name matching game!
Street name matching game!
Street name matching game!
Street name matching game!
Countdown to the finals
Last minute touches on the slides
Platform gurus
Intro to the AI-DO, it’s as easy as a few lines of code
The audience of AIDO2
JetBrains saying a word or two
Group shot with our winners!
Don't know much about the AI Driving Olympics?
It is an accessible and reproducible autonomous car competition designed with straightforward standardized hardware, software and interfaces.
Get Started
Step 1: Build and test your agent with our available templates and baselines
We will evaluate submissions by participants that are in the top part of the leaderboard in the simulated testing challenge.
The robotarium evaluations are limited, and we will do them in a round robin strategy for each user. We aim to evaluate all in the top 10 of the simulated challenge; and then more if there is the possibility.
Participants can have multiple submissions in the “real” challenges. We will evaluate first according to “user priority” or by most recent. The priority is settable through the web interface by using the top right button.
Deadlines
The challenges will close May 21 at 8pm Montreal (EDT) time. Please check the server timestamp for the precise time in your time zone.