IIT Jodhpur, June 03, 2023: Prof. Debasis Das of IIT Jodhpur, Rajasthan, India, tells us about his experience in bringing Duckietown to his lab to support the teaching, research, and outreach efforts of his team in the fields of autonomous vehicles, robotics, computer vision, machine learning.
Quick links
Robotics education and research at IIT Jodhpur: an interview with Prof. Debasis Das
Hello Professor Das, thank you for your time in taking our questions. How did you learn about Duckietown?
I learned about the Duckietown project through a variety of sources, including online platforms like social media, discussion forums, and academic publications, where many researchers and robotics enthusiasts have shared information related to the project. Additionally, some of my collaborators have also mentioned the project and its educational and research goals. Through these sources, I gained an understanding of what the Duckietown project is and the impact it has had in the field of robotics education and research.
This is great to hear! Starting from the education aspects, what classes are you teaching at IIT Jodhpur using Duckietown?
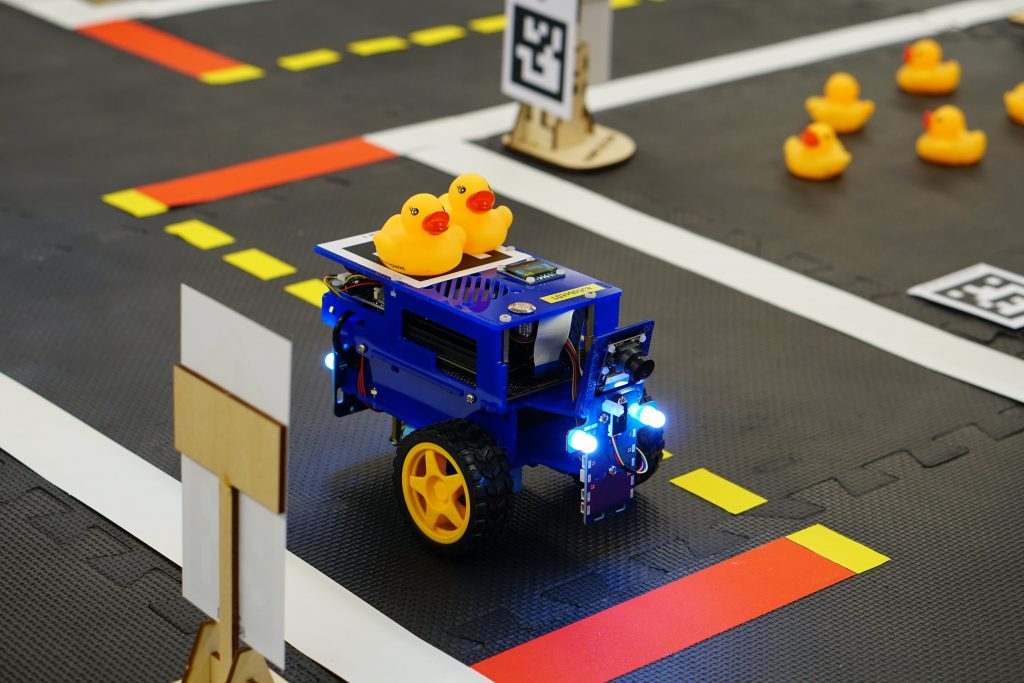
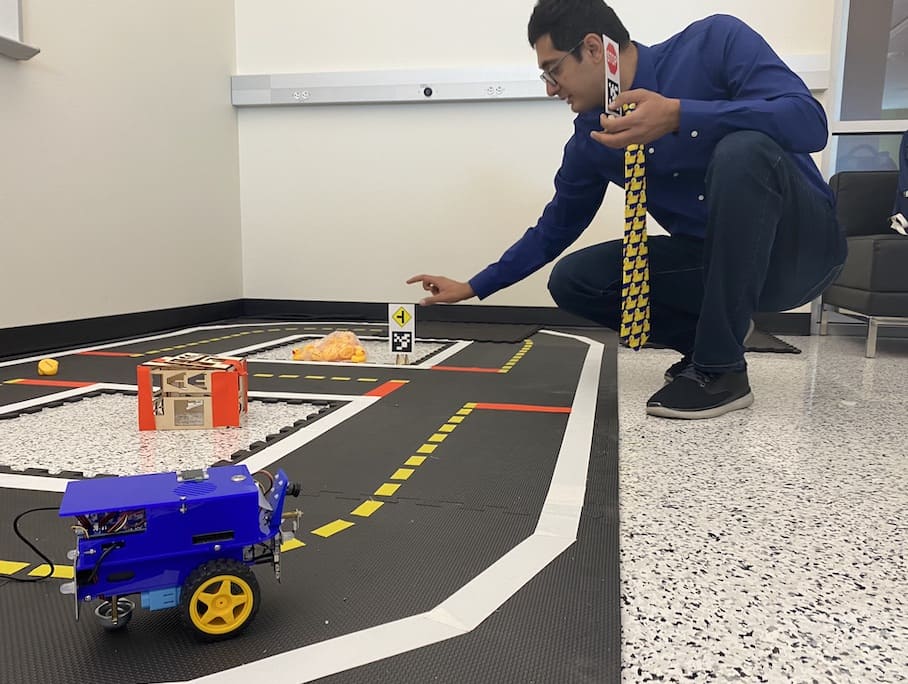
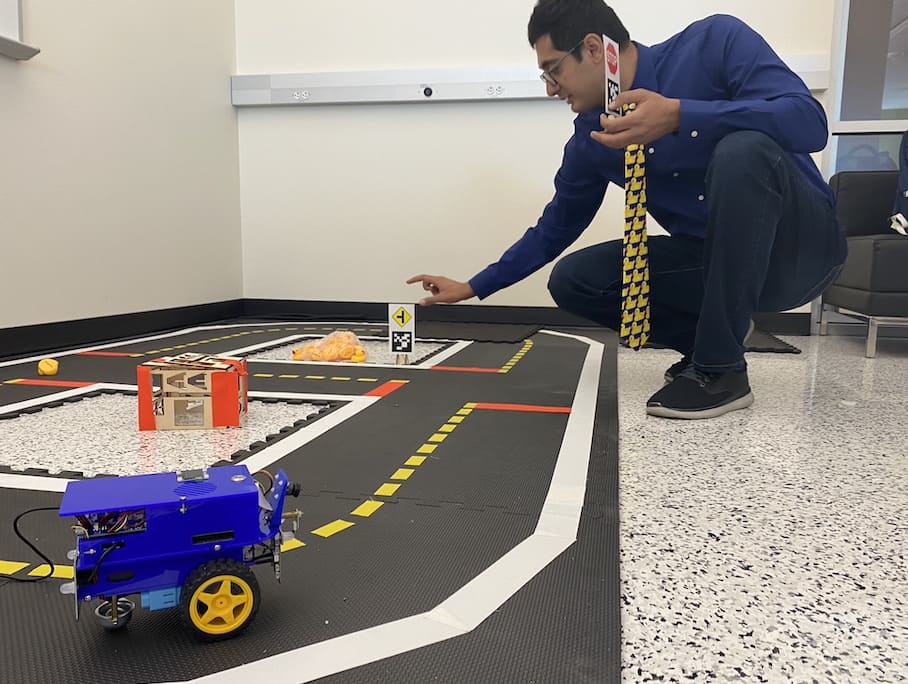
Duckietown is being used for a variety of classes and educational programs, primarily in the fields of computer science and engineering at IIT Jodhpur. Most recently we have utilized the platform to teach the following classes:
- Vehicular Ad Hoc Networks: This class focuses on the design, development, and testing of autonomous vehicles using the Duckietown platform to simulate real-world scenarios.
- Robotics and Mobility: This class teaches students the principles of mobility and the role of machine learning for decision-making, using the Duckietown platform for practical exercises.


What has your and your students’ experience been in these courses?
We have found that hands-on learning experiences, such as those provided by Duckietown, are more effective in increasing students’ knowledge and capacity to recall topics than standard lecture-based teaching approaches.
Furthermore, the dynamic and fascinating elements unique to Duckietown increase students’ passion for and interest in their assignments.
We have received large positive feedback for Duckietown from students and researchers who have used it at IIT Jodhpur, with many appreciating its entertaining and challenging nature. The platform’s scalability and ease of use across a wide range of disciplines and programs are commendable. Students also appreciate the opportunity to learn programming and problem-solving with real-world robotics difficulties.
Though there may be some disparities in how each student utilizes the platform and what they gain in terms of education and enjoyment, the data thus far suggests that Duckietown can be a helpful and fun resource for students working in robotics and related fields.
"The Duckietown platform has been a valuable resource in supporting our research activities. We have used it as a tool for engaging with the broader community and promoting interest in science, technology, engineering, and STEM fields, including hosting workshops, competitions, and other events that showcase the capabilities of autonomous vehicles and provide opportunities for hands-on learning and exploration."
Prof. Debasis Das

Are you using Duckietown to support your research activities too?
Yes, the Duckietown platform has been a valuable resource in supporting our research activities. We have used the platform to test and evaluate novel algorithms and methods for autonomous vehicle design and control, and to investigate issues such as computer vision, machine learning, and control systems.
Are there other ways Duckietown has helped you conduct teaching, research, and outreach efforts?
We have used Duckietown as a tool for engaging with the broader community and promoting interest in science, technology, engineering, and mathematics (STEM) fields. We have hosted workshops, competitions, and other events that showcase the capabilities of autonomous vehicles and provide opportunities for hands-on learning and exploration.

Would you suggest Duckietown to your colleagues?
Yes, I would definitely recommend Duckietown to my colleagues who are interested in teaching and researching areas such as autonomous vehicles, robotics, computer vision, machine learning, and control systems.
Duckietown provides a realistic and scalable environment for testing and assessing novel algorithms and methods for autonomous vehicle design and control, as well as a platform for engaging students and the general public in learning and discovery in these domains.
"We have received large positive feedback for Duckietown from students and researchers who have used it at IIT Jodhpur, with many appreciating its entertaining and challenging nature. The platform's scalability and ease of use across a wide range of disciplines and programs are commendable."
Debasis Das
Learn more about Duckietown
The Duckietown platform enables state-of-the-art robotics and AI learning experiences.
It is designed to help teach, learn, and do research: from exploring the fundamentals of computer science and automation to pushing the boundaries of human knowledge.
Tell us your story
Are you an instructor, learner, researcher or professional with a Duckietown story to tell? Reach out to us!





















 ,
, ), except for
), except for