Join the first hardware based MOOC about autonomy on edX!
Are you curious about robotics, self-driving cars, and want an opportunity to build and program your own? Set to start on March 22nd, 2020, “Self-Driving Cars with Duckietown” is a hands-on introduction to vehicle autonomy, and the first ever self-driving cars MOOC with a hardware track!
Designed for university-level students and professionals, this course is brought to you by the Swiss Federal Institute of Technology in Zurich (ETHZ), in collaboration with the University of Montreal, the Duckietown Foundation, and the Toyota Technological Institute at Chicago.
Learning autonomy requires a fundamentally different approach when compared to other computer science and engineering disciplines. Autonomy is inherently multi-disciplinary, and mastering it requires expertise in domains ranging from fundamental mathematics to practical machine-learning skills.
This course will explore the theory and implementation of model- and data-driven approaches for making a model self-driving car drive autonomously in an urban environment, while detecting and avoiding pedestrians (rubber duckies)!
In this course you will learn, hands-on, introductory elements of:
computer vision
robot operations
ROS, Docker, Python, Ubuntu
autonomous behaviors
modelling and control
localization
planning
object detection and avoidance
reinforcement learning.
The Duckietown robotic ecosystem was created at the MIT Computer Science and Artificial Intelligence Laboratory (CSAIL) in 2016 and is now used in over 90 universities worldwide.
“The Duckietown educational platform provides a hands-on, scaled down, accessible version of real world autonomous systems.” said Emilio Frazzoli, Professor of Dynamic Systems and Control, ETH Zurich, “Integrating NVIDIA’s Jetson Nano power in Duckietown enables unprecedented access to state-of-the-art compute solutions for learning autonomy.”
This massive online open course will be have a hands-on learning approach using, for the hardware track, real robots. You will learn how autonomous vehicles make their own decisions, going from theory to implementation, deployment in simulation as well as on the new NVIDIA Jetson Nano powered Duckiebots.
“The new NVIDIA Jetson Nano 2GB is the ultimate starter AI computer for educators and students to teach and learn AI at an incredibly affordable price.” said Deepu Talla, Vice President and General Manager of Edge Computing at NVIDIA. “Duckietown and its edX MOOC are leveraging Jetson to take hands-on experimentation and understanding of AI and autonomous machines to the next level.”
The Duckiebot MOOC Founder’s edition kits are available worldwide, and thanks to OKdo, are now available with free shipping in the United States and in Asia!
“I’m thrilled that ETH, with UMontreal, the Duckietown Foundation, and the Toyota Technological Institute in Chicago, are collaborating to bring this course in self-driving cars and robotics to the 35 million learners on edX. This emerging technology has the potential to completely change the way we live and travel, and the course provides a unique opportunity to get in on the ground floor of understanding and using the technology powering autonomous vehicles,” said Anant Agarwal, edX CEO and Founder, and MIT Professor.
Enroll now and don’t miss the chance to join in the first vehicle autonomy MOOC with hands-on learning!
Robert is a Ph. D. student at the Budapest University of Technology and Economics.
His work focuses on deep learning and he has (co)authored papers on reinforcement learning (RL), imitation learning (IL), and sim-to-real learning using for autonomous vehicles using Duckietown.
Robert and his team won the LFV_multi hardware challenge of the 2020 AI Driving Olympics.
Today, Robert shares some of his thoughts with us!
What brought you to work on AVs?
I started my journey in the world of AV’s in 2016 when I was hired at the automotive supplier company “Continental” in Romania. In 2018 I moved to Budapest, Hungary, to join Continental’s Deep Learning Competence Center where we develop novel perception methods for AVs.
In 2019, with the support of the company, I started my Ph.D. at Budapest University of Technology and Economics on the topic “Deep Reinforcement Learning in Complex environments”.
At this time, I crossed paths with the Duckietown environment. Continental bought 12 Duckiebots and supplementary materials to build our own Duckietown environment in a lab at the university.
Tell us about you and your team
At the beginning of my Ph. D. and with the arrival of the Duckietown materials we established the “PIA” (Professional Intelligence for Automotive) project with the aim to provide education and mentorship for undergrad and master students in the field on Machine Learning and AV.
In each semester since 2019 February I managed a team of 4-6 people developing their own solutions for AI-DO challenges. I wrote a short blogpost presenting my team and our solutions submitted to AI-DO 5.
"With the arrival of the Duckietown material we established the PIA project with the aim to provide education and mentorship for undergrad and master students in the field on Machine Learning and autonomous vehicles (AV)."
What approach did you choose for AI-DO, and why?
I started to tackle the AI-DO challenges applying deep reinforcement learning (DRL) for driver policy learning and state representation learning (SRL) for sim2real transfer.
The reason for my chosen approach is my Ph. D. topic, and I plan to develop and test my hypotheses in the Duckietown environment.
What are the hardest challenges that you faced in the competition?
In the beginning, there was a simple agent training task that caused some headaches: finding a working DRL method, composing a good reward function, preprocessing the observations to reduce the search space, and fine-tuning all the parameters. All these were challenges, but well-known ones in the field.
One unexpected challenge was the continuous updates of the gym-duckietown environment. While we are thrilled that the environment gets improved by the Duckietown team, we faced occasional breakdowns in our methods when applying them to the newest releases, which caused some frustration.
The biggest headache was caused by the different setups in the training and evaluation environments: in the evaluation environment, the images are dimmed while during training they are clear. Furthermore, the real world is full of nuisances – for example lags introduced by WiFi communication, which causes different outcomes in the real environment. This challenge can be mitigated to some degree with the algorithms running directly on the Duckiebot’s hardware, and by using a more powerful onboard computer, e.g., the Jetson Nano 2GB development board.
Are you satisfied with the final outcome?
I am satisfied with the achievements of my team, which kept the resolve throughout the technical challenges faced.
I’m sure we would’ve done even better in the real-world challenge if we had seen our submission running earlier in the Autolab, so we could have adjusted our algorithms. We are going to work to bring one to our University in the next future.
What are you going to change next time?
I believe the AI-DO competition as well as the Duckietown platform would improve through more powerful hardware. I hope to see Duckiebots (DB19) upgraded to support the new Jetson Nano hardware!
(Since the date of the interview, Duckiebots model DB21 supports Jetson Nano boards)
Learn more about Duckietown
The Duckietown platform offers robotics and AI learning experiences.
Duckietown is modular, customizable and state-of-the-art. It is designed to teach, learn, and do research: from exploring the fundamentals of computer science and automation to pushing the boundaries of knowledge.
With the fifth edition of the AI Driving Olympics finals day approaching, 1326 solutions submitted from 94 competitors in three challenges, it is time to glance over at the leaderboards!
Leaderboards updates
This year’s challenges are lane following (LF), lane following with pedestrians (LFP) and lane following with other vehicles, multibody (LFV_multi). Learn more about the challenges here.
Each submission can be sent to multiple challenges.
Let’s look at some of the most promising or interesting submissions.
The Montréal menace
Raphael Jean at Mila / University of Montréal is a new entrant for this year.
The deadline for submitting to the AI-DO 5 is 12am EST on Thursday, December 10th, 2020. The top three entries (more if time allows) in each simulation challenge will be evaluated on real robots and presented at the finals event at NeurIPS 2020, which happens at 5pm EST on Saturday, December 12.
AI-DO 5 is in full swing and we want to bring you some updates: better graphics, more maps, faster and more reliable backend and an improved GUI to submit to challenges!
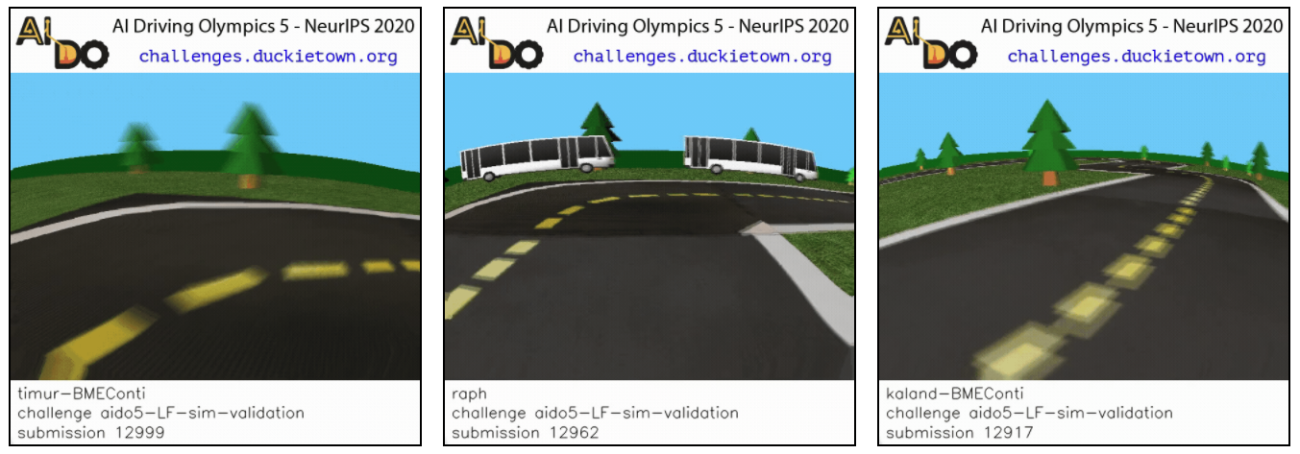
Challenges visualization
We updated the visualization. Now the evaluation produces videos with your name and evaluation number (as below).
Challenges updates
We fixed some of the bugs in the simulator regarding the visualization (“phantom robots” popping in and out).
We updated the maps in the challenges to have more variety in the road network; we put more grass and trees to make the maps more joyful!
We have updated the maps with more trees and grass
Faster and more reliable backend
The server was getting slow given the number of submissions, and sometime the service was unavailable. We have revamped the server code and added some backend capacity to be more fault-tolerant. It is now much faster!
Thanks so much to the participants that helped us debug this problem!
We overhauled the server code to make it much faster!
More evaluators
We brought online many more CPU and GPU evaluators. We now encourageyou to submit more often as we have a lot more capacity.
We have many more evaluators now!
Submit to testing challenges
We also remind you that the challenges on the front page are the validation challenges, in which everybody can see the output. However what counts for winning are the testing challenges!
To do that you can use dts challenges submit with the –challenges option
Or, you can use a new way using the website that we just implemented, described below.
Submitting to other challenges
Step 1: Go to your user page, by clicking “login” and then going to “My Submissions”.
Step 2: In this page you will find your submissions grouped by “component”.
Click the component icon as in the figure.
Step 3: The page will contain some buttons that allow you to submit to other challenges that you didn’t submit to yet.
The 5th edition of the Artificial Intelligence Driving Olympics (AI-DO 5) has officially started!
The AI-DO serves to benchmark the state of the art of artificial intelligence in autonomous driving by providing standardized simulation and hardware environments for tasks related to multi-sensory perception and embodied AI.
Duckietown hosts AI-DO competitions biannually, with finals events held at machine learning and robotics conferences such as the International Conference on Robotics and Automation (ICRA) and the Neural Information Processing Systems (NeurIPS).
The most traditional of AI-DO challenges: have a Duckiebot navigate a road loop without intersection, pedestrians (duckies) or other vehicles. The objective is traveling the longest path in a given time while staying in the lane.
The LFP challenge is new to AI-DO. It builds upon LF by introducing static obstacles (duckies) on the road. The objectives are the same as for lane following, but do not hit the duckies!
In this traditional AI-DO challenge, contestants seek to travel the longest path in a city without intersections nor pedestrians, but with other vehicles on the road. Except this year there’s a twist. In this year’s novel multi-body variant, all vehicles on the road are controlled by the submission.
Getting started: the webinars
We offer a short webinar series to guide contestants through the steps for participating: from running our baselines in simulation as well as deploying them on hardware. All webinars are 9 am EST and free!
Introduction
Learn about the Duckietown project and the Artificial Intelligence Driving Olympics.
Nov. 9, 2020
ROS baseline
How to run and build upon the “traditional” Robotic Operation System (ROS) baseline.
Nov. 11, 2020
Local development
On the workflow for developing and deploying to Duckiebots, for hardware-based testing.
Nov. 13, 2020
RL baseline
Learn how to use the Pytorch template for reinforcement learning approaches.
Nov. 16, 2020
IL baseline
Introduction to the Tensorflow template, use of logs and simulator for imitation learning.
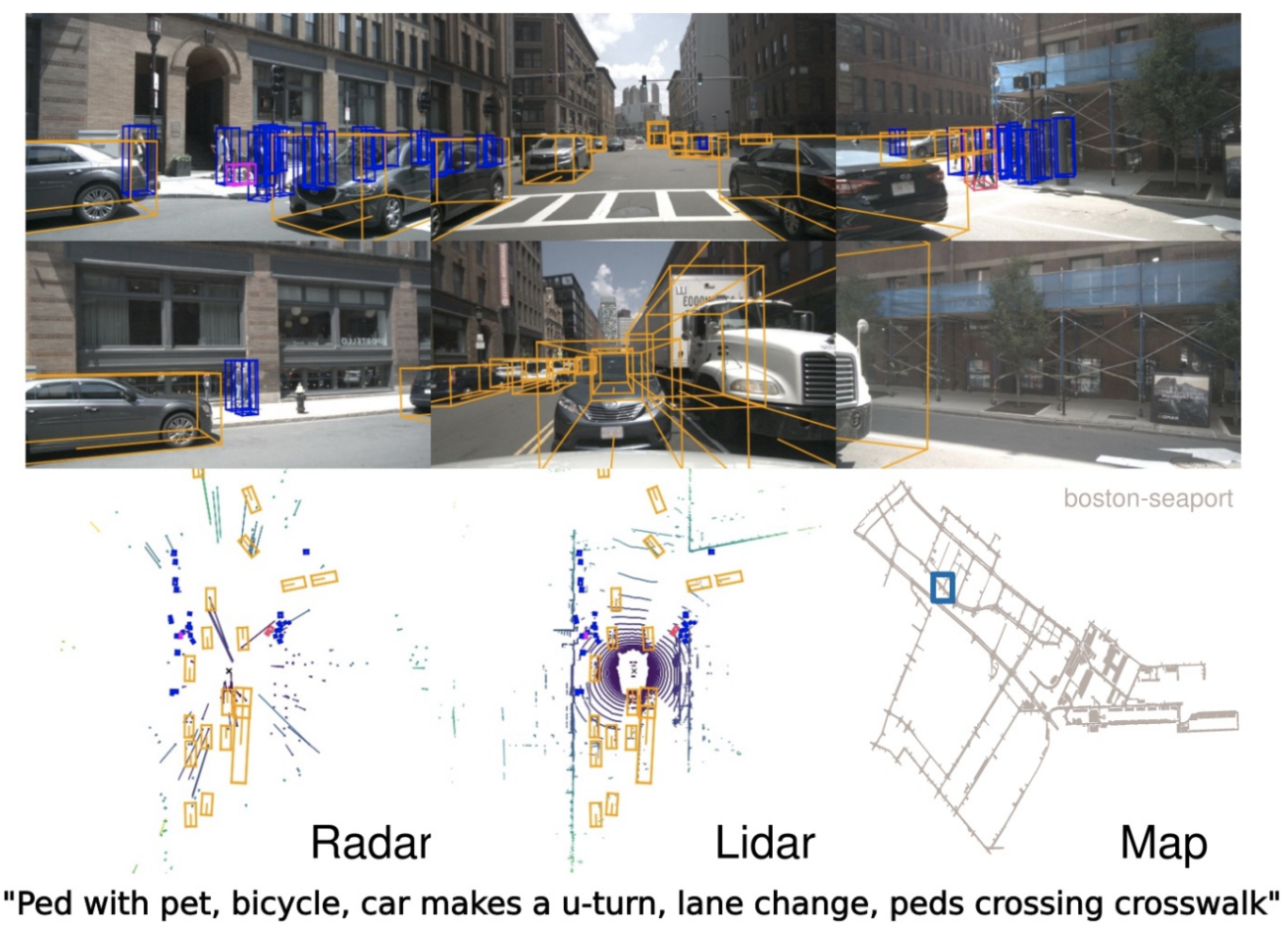
Previous AI-DO editions featured: detection, tracking and prediction challenges around the nuScenes dataset.
For the 5th iteration of AI-DO we have a brand new lidar segmentation challenge.
The challenge is based on the recently released lidar segmentation annotations for nuScenes and features an astonishing 1,400,000,000 lidar points annotated with one of 32 labels.
Furthermore, due to popular demand, we will organize the 3rd iteration of the nuScenes 3d detection challenge. Please see https://www.nuscenes.org/object-detection for more details.
AI-DO 5 Finals event
The AI-DO finals will be streamed LIVE during 2020 edition of the Neural Information Processing Systems (NeurIPS 2020) conference in December.
What a start for IROS 2020 with the "Benchmarking Progress in Autonomous Driving" workshop!
The 2020 edition of the International Conference on Intelligent Robots and Systems (IROS) started great with the workshop on “Benchmarking Progress in Autonomous Driving”.
The workshop was held virtually on October 25th, 2020, using an engaging and concise format of a sequence of four 1.5-hour moderated round-table discussions (including an introduction) centered around 4 themes.
The discussions on the methods by which progress in autonomous driving is evaluated, benchmarked, and verified were exciting. Many thanks to all the panelists and the organizers!
Here are the videos of the various sessions.
Opening remarks
Theme 1: Assessing progress for the field of autonomous vehicles (AVs)
The workshop is structured into 4 panels around four themes.
Assessing Progress for the Field of Autonomous Driving
How to evaluate AV risk from the perspective of real world deployment (public acceptance, insurance, liability, …)?
Best practices for AV benchmarking
Algorithms and Paradigms
The workshop will take place on Oct. 25, 2020 starting at 10am EDT.
Invited Panelists
We have a list of excellent invited panelists from academia, industry, and regulatory organizations. These include:
Emilio Frazzoli (ETH Zürich / Motional)
Alex Kendall (Wayve)
Jane Lappin (National Academy of Sciences)
Bryant Walker Smith (USC Faculty of Law)
Luigi Di Lillo (Swiss Re Insurance),
John Leonard (MIT)
Fabio Bonsignorio (Heron Robots)
Michael Milford (QUT)
Oscar Beijbom (Motional)
Raquel Urtasun (University of Toronto / Uber ATG).
Please join us...
Please join us on October 25, 2020 starting at 10am EST for what should be a very engaging conversation about the difficult issues around benchmarking progress in autonomous vehicles.
Duckietown and NVIDIA partnership for accessible AI and robotics education
NVIDIA GTC, October 6, 2020: Duckietown and NVIDIA align efforts to push the boundaries of accessible, state-of-the-art higher-education in robotics and AI. The tangible outcome is a brand new “Founder’s edition” Duckiebot, which will be broadly available from January 2021, powered by the new NVIDIA Jetson Nano 2GB platform.
Autonomy is already changing the world. Duckietown and NVIDIA recognize the importance of hands-on education in robotics and AI to empower everybody today to understand and design the next generations of autonomy.
The result of this collaboration is a new NVIDIA powered Duckiebot, using the novel Jetson Nano 2GB board, that will enable local execution of machine learning agents in the Duckietown ecosystem.
To celebrate this special occasion, the Duckiebot has been redesigned to include: new sensors (time of flight, IMU, encoders), a new custom-designed battery providing real time diagnostics (state of charge, remaining autonomy and other health metrics), and fun accessories like a screen to visualize key metrics. All of this while keeping the price accessible for anyone willing to experience the challenges of a real-life robotic ecosystem.
A great team
“The new NVIDIA Jetson Nano 2GB is the ultimate starter AI computer for educators and students to teach and learn AI at an incredibly affordable price.” said Deepu Talla, Vice President and General Manager of Edge Computing at NVIDIA. “Duckietown and its edX MOOC are leveraging Jetson to take hands-on experimentation and understanding of AI and autonomous machinesto the next level.”
“The Duckietown educational platform provides a hands-on, scaled down, accessible version of real world autonomous systems.” said Emilio Frazzoli, Professor of Dynamic Systems and Control, ETH Zurich, “Integrating NVIDIA’s Jetson Nano power in Duckietown enables unprecedented access to state-of-the-art compute solutions for learning autonomy.”
Learn more
To know more about the technical specifications of the new NVIDIA powered Duckiebot, or to pre-order yours, visit the Duckietown project shop here.
The new Duckiebot will be also used in the “Self-driving Cars with Duckietown” Massive Online Open Course (MOOC) that will be held in March 2021 on edX. You can find more information about the MOOC here.
In the world of engineering education, there are many excellent courses, but often the curriculum has one serious drawback – the lack of good connectivity between different topics. Over in Saint Petersburg, Russia, Kirill Krinkin from SPbETU and JetBrains Research has been using Duckietown to address this problem through an intensive STEM winter course.
STEM Intensive Learning Approach
by Kirill Krinkin
The first part of the school program was a week of classes in the base topic areas which were chosen to complement each other and help students see the connection between seemingly different things – mathematics, electronics and programming.
Of course, the main goal of the program was to give students the opportunity to put their new found knowledge into practice themselves.
Duckietown was the perfect fit for our course because it offered a hands-on learning experience for all of our main topics areas, and once we covered those subject in the first lessons, we challenged the students with much more complex tasks – in the form of projects – in the second half of the course. It made for an exciting and engaging curriculum because students could address a problem, write a program to solve it, and then immediately launch it on a real robot.
The main advantage of Duckietown compared to many other platforms is that there is a very small learning curve: people who knew nothing about programming and robotics started working on projects after only a few days!
Overview of the course
Part 1 – Main Topic Areas
Subject 1: Linear Algebra
Students spent one day studying vectors and matrices, systems of linear equations, etc. Practical tasks were built in an interactive mode: the proposed tasks were solved individually, and the teacher and other students gave comments and tips.
Subject 2: Electricity and Simple Circuits
Students studied the basics of electrodynamics: voltage, current, resistance, Ohm’s law and Kirchhoff’s laws. Practical tasks were partially done in the electric circuits simulator or performed on the board, but more time was devoted to building real circuits, such as logic circuits, oscillatory circuits, etc.
Subject 3: Computer Architecture
In a sense, a bridge connecting physics and programming. Students studied the fundamental basis, the significance of which is more theoretical than practical. As a practice, students independently designed arithmetic-logic circuits in the simulator.
Subject 4: Programming
Python 2 was chosen as the programming language, as it is used in programming under ROS. After we taught the material and gave examples of solving problems, students were challenged with their own problems to solve, which we then evaluated.
Subject 5: ROS
Here the students started programming robots. Throughout the school day, students sat at computers, running the program code that the teacher talked about. They were able to independently launch the basic units of ROS, and also get acquainted with the Duckietown project. At the end of this day, students were ready to begin the design part of the course – solving practical problems.
Part 2 – Projects
1. Calibration of colors
Duckiebots needs to calibrate the camera when lighting conditions change, so this project focussed on the task of automatic calibration. The problem is that color ranges are very sensitive to light. Participants implemented a utility that would highlight the desired colors on the frame (red, white and yellow) and build ranges for each of the colors in HSV format.
2. Duck Taxi
The idea of this project was that Duckiebot could stop near some object, pick it up and then continue along, following a certain route. Of course, a bright yellow Duckie was the chosen passenger. The participants divided this task into two: detection and movement along the graph.
drive while Duckie is not detected
Duckie identified as a yellow spot with an orange triangle 🙂
Building a route according to the road graph and destination point
3. Building a road map
The goal of this project was to build a road map without providing a priori environmental data for the Duckiebot, relying solely on camera data. Here’s the working scheme of the algorithm developed by the participants:
4. The patrol car
This project was invented by the students themselves. They offered to teach one Duckiebot, the “patrol”, to find, follow, and stop an “intruding” Duckiebot. The students used ArUco markers to identify the Intruder on the road as they are easy to work with and they allow you to determine the orientation and distance of the marker. Next, the team changed the state machine of the Patrol Duckiebot so that when approaching the stop-line the bot would continue through the intersection without stopping. Finally, the team was able to get the Patrol Duckiebot to stop the Intruder bot by connecting via SSH and turning it off. The algorithm of the patrol robot can be represented as the following scheme:
Summary
Students walked away from our STEM intensive learning program with the foundations of autonomous driving, from the theoretical math and physics behind the programming and circuitry to the complex challenges of navigating through a city. We were successful in remaining accessible to beginners in a particular area, but also providing materials for repetition and consolidation to experienced students. Duckietown is an excellent resource for bringing education to life.
After our course ended students were asked about their experience. 100% of them said that the program exceed their expectations. We can certainly say that the Duckietown platform played a pivotal role in our success.
We are excited to announce the launch of the AI-DO 3, which will culminate in a live competition event to be held at NeurIPS this Dec. 13-14.
The AI-DO is a global robotics competition that comprises a series of events based on autonomous driving. This year there are three events, urban (Duckietown), advanced perception (nuScenes), and racing (AWS Deepracer). The objective of the AI-DO is to engage people from around the world in friendly competition, while simultaneously benchmarking and advancing the field of robotics and AI.