



[pdfviewer width=”600px” height=”849px” beta=”false”]https://www.duckietown.com/wp-content/uploads/2019/04/AIDO2-Press-release-EN.pdf[/pdfviewer]
















We’re just about at the end of the road for the 2018 AI Driving Olympics.
There’s certainly been some action on the leaderboard these last few days and it’s going down to the wire. Don’t miss your chance to see you name up there and win the amazing prizes donated by nuTonomy and Amazon AWS!
Submissions will close at 11:59pm PST on Thursday Dec. 6.
Please join us at NeurIPS for the live competition 3:30-5:00pm EST in room 511!
The AI Driving Olympics, presented by the Duckietown Foundation with help from our partners and sponsors is now in full swing. Check out the leaderboard!
We now have templates for ROS, PyTorch, and TensorFlow, as well as an agnostic template.
We also have baseline implementation using the classical pipeline, imitation learning with data from both simulation and real Duckietown logs, and reinforcement learning.
We are excited to announce that we will be hosting a series of interactive tutorials for competitors to get started. These tutorials will be streamed live from our Facebook page.
See here for the full tutorial schedule.




Submissions to the AI Driving Olympics are officially open for the Lane Following task evaluated in simulation.
To make a submission, follow the instructions in the AIDO-book.
For example, a good place to start is the Quick Start Guide.
For discussion please check out the AIDO forums.

Packed Duckietown
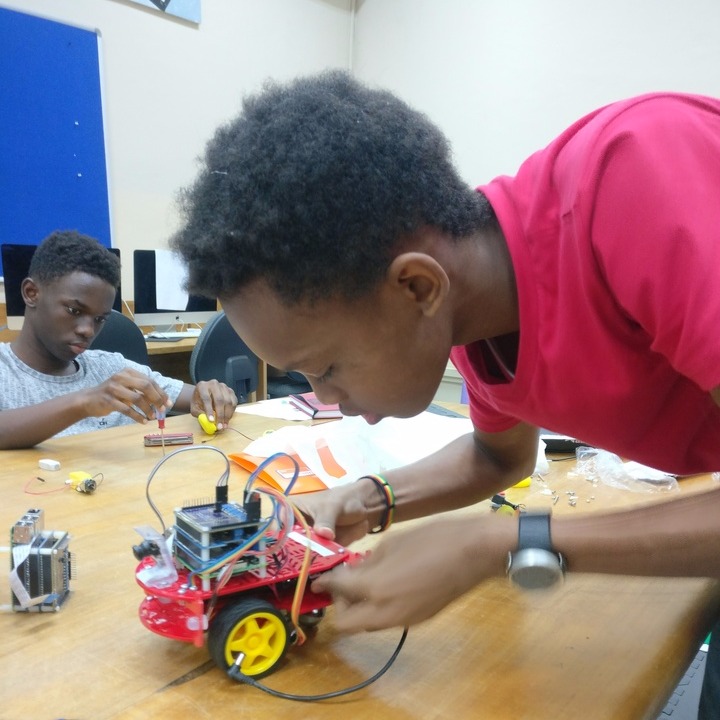
Building Moose
 Moose the Duckiebot, up and running!
Moose the Duckiebot, up and running!
 Presenting in front of the judging committee
Presenting in front of the judging committee
 The best team!
The best team!
 MISE 2018 – Ayeekoo!
MISE 2018 – Ayeekoo!
Autores:
Andrea Censi Liam Paull, Jacopo Tani, Julian Zilly, Thomas Ackermann, Oscar Beijbom, Berabi Berkai, Gianmarco Bernasconi, Anne Kirsten Bowser, Simon Bing, Pin-Wei David Chen, Yu-Chen Chen, Maxime Chevalier-Boisvert, Breandan Considine, Andrea Daniele, Justin De Castri, Maurilio Di Cicco, Manfred Diaz, Paul Aurel Diederichs, Florian Golemo, Ruslan Hristov, Lily Hsu, Yi-Wei Daniel Huang, Chen-Hao Peter Hung, Qing-Shan Jia, Julien Kindle, Dzenan Lapandic, Cheng-Lung Lu, Sunil Mallya, Bhairav Mehta, Aurel Neff, Eryk Nice, Yang-Hung Allen Ou, Abdelhakim Qbaich, Josefine Quack, Claudio Ruch, Adam Sigal, Niklas Stolz, Alejandro Unghia, Ben Weber, Sean Wilson, Zi-Xiang Xia, Timothius Victorio Yasin, Nivethan Yogarajah, Yoshua Bengio, Tao Zhang, Hsueh-Cheng Wang, Matthew Walter, Stefano Soatto, Magnus Egerstedt, Emilio Frazzoli,
Publicado en RSS Workshop on New Benchmarks, Metrics, and Competitions for Robotic Learning
Link: Disponible aquí