

-

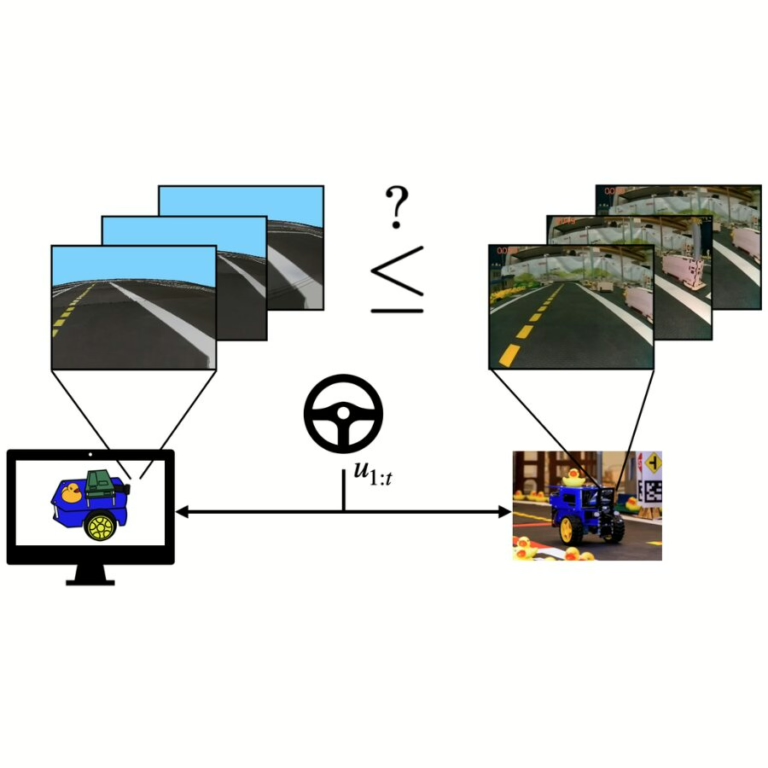
- Figure 1. Comparing Proxy Domain Performance in Robotics

-
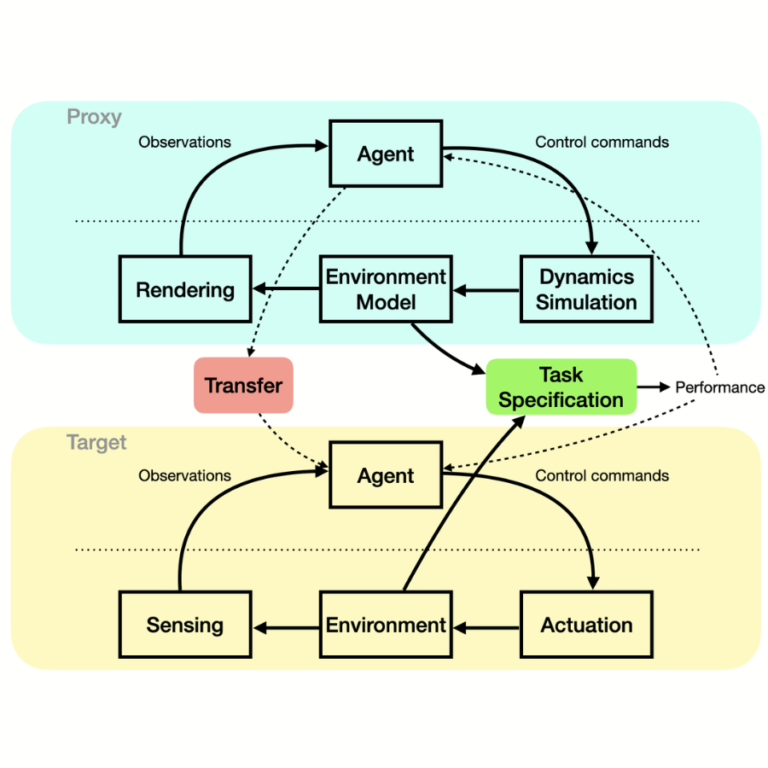
- Figure 2. Agent-Environment Interface in Proxy and Target Domains

-
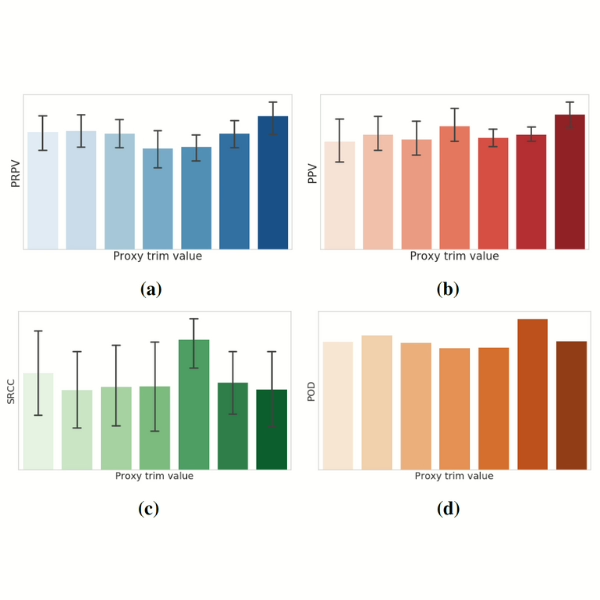
- Figure 3. Proxy Usefulness Metrics Comparison
-
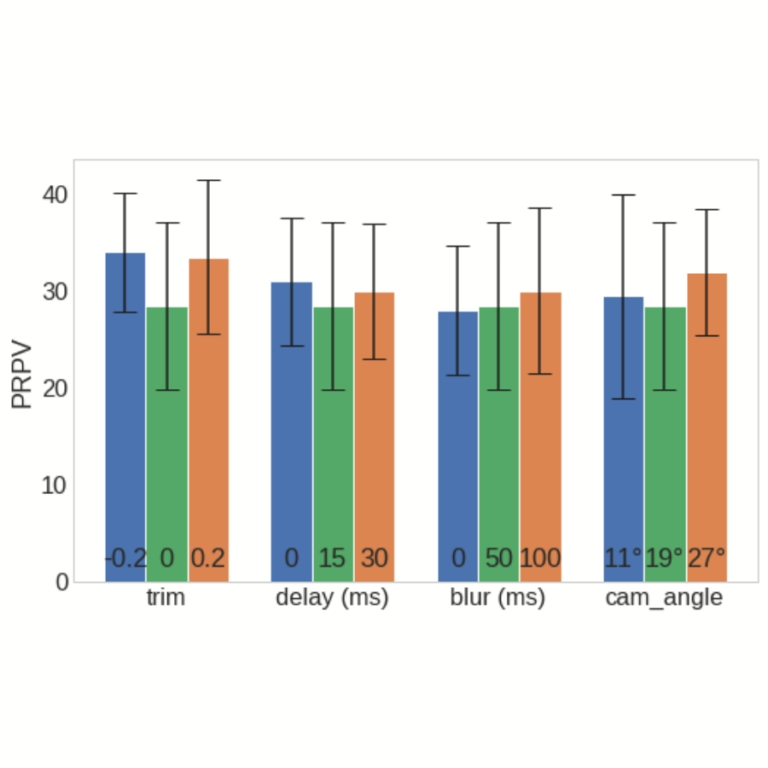
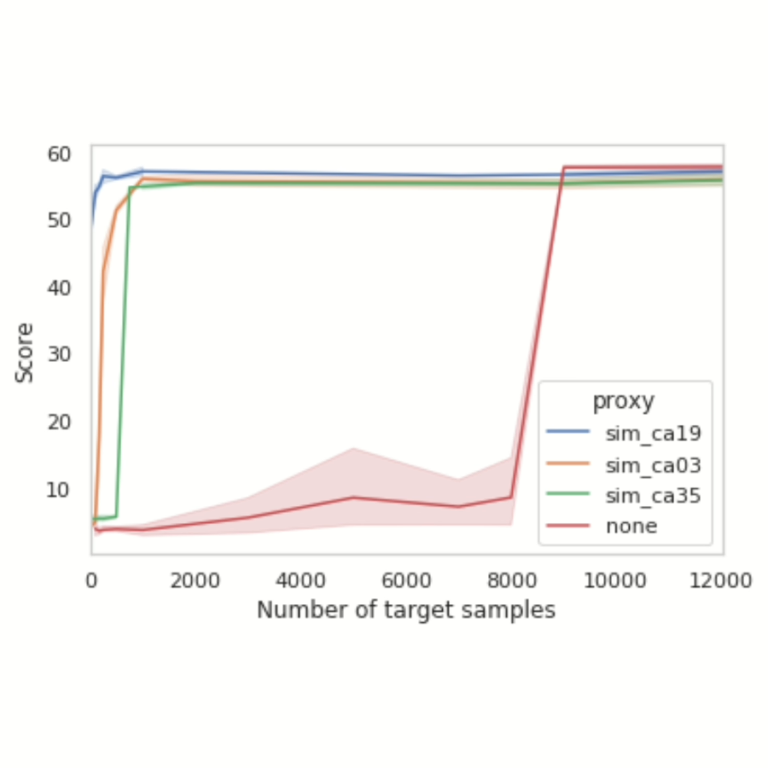
- Figure 4. Evaluating Duckietown Proxy Domains for AIDO Challenge

-
- Figure 5. Proxy vs. Target Domain in Duckietown

-
- Figure 6. Performance of an Imitation Learning Agent in Duckietown






