







We are excited to bring you tremendous news about the Duckietown project.
In the past years we have had the support from many enthusiastic individuals who have donated their time and efforts to help the Duckietown project grow, and grown it has!
Duckietown started at MIT in 2016 – almost two years ago. Now Duckietown classes have been taught in 10 countries with more than 700 alumni.
The last months have been a transformative period for the project, as we prepare to jump to the next level in terms of scope and reach.
We have established the Duckietown Foundation, a non-profit entity that will lead the Duckietown project.
Our mission: make the world excited about the beauty, the fun, the importance, and the challenges of robotics and artificial intelligence, through learning experiences that are tangible, accessible, and inclusive.
The Duckietown Foundation will serve as the coordination point for the development of Duckietown. As a non-profit, the foundation can accept donations from individuals and companies for the promotion of affordable and fun robotics learning programs around the world.
We are organizing a Kickstarter to make it easier for people to obtain Duckiebots and Duckietowns.
This solves the biggest hurdle so on reproducing the Duckietown experience: the the lack of a one-click solution to acquire the hardware.
Also, working with thousands of pieces allows to drive down the price and to design our own custom boards.
See: Our Kickstarter
As much as we aim to have affordable hardware, in certain parts of the world the only realistic price is $0.
That is why we have included a donate-a-Duckiebot and donate-a-class program through the Kickstarter.
Become a friend of Duckietown and support the distribution of low-cost and playful AI and robotics education to even more schools across the globe by backing our Kickstarter campaign.
To learn more about how to support Duckietown, reach out to [email protected].
We’ve designed a new website that better serves users of the platform by offering support forums and more organized access to the teaching materials.
See: The new forums.
See: New “duckumentation” site docs.duckietown.com
We want people to share their Duckietown experiences with other Duckie-enthusiasts, whether they be far or near. That’s now possible through upwards of 700 “community” subsites, each with a blog and a forum.
For more information, see the post Communities sites launched.
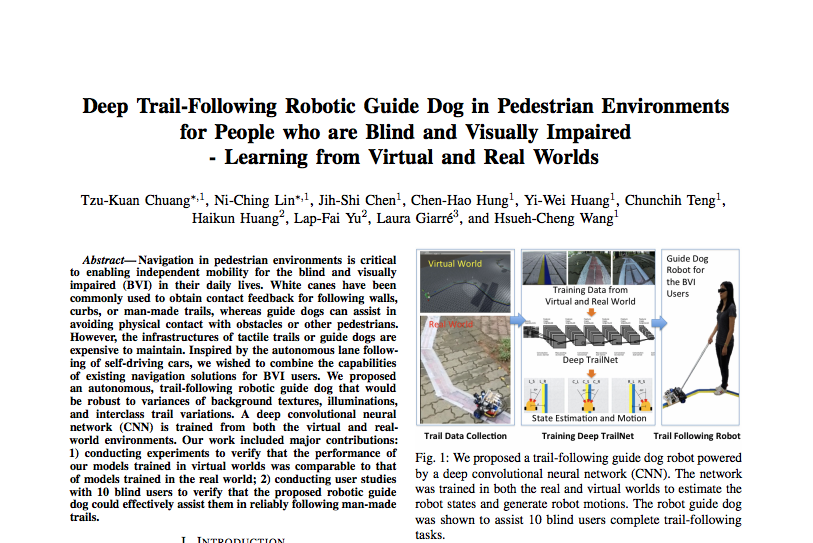
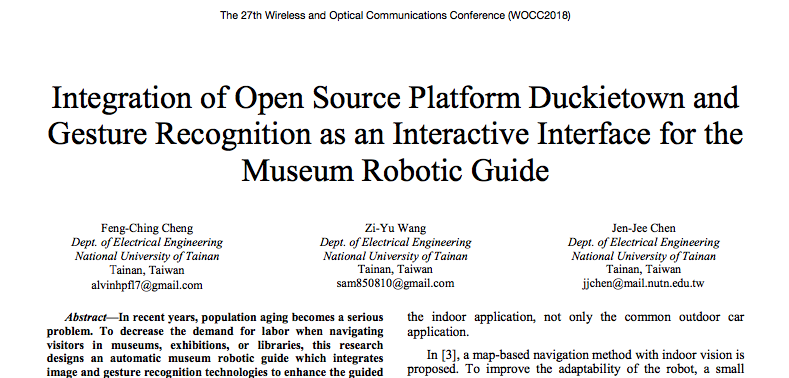
In addition to its role as an education platform, Duckietown is a useful research tool.
We are happy to announce that Duckietown is the official platform for the AI Driving Olympics, a machine learning competition to be held at NIPS 2018 and ICRA 2019, the two largest machine learning and robotics conferences in the world. We challenge you to put your coding to the test and join the competition.
The Duckietown project relies on an active and engaged community, which is why we want you to stay involved! Support robotics education and research – Sign up on our website! Back our kickstarter! Compete in the AI Driving Olympics!
For any additional information of if you would like to help us in other ways, please see here for how to help us.
An Italian interview to the Zürich students and instructors in the occasion of Demo Day 2017.
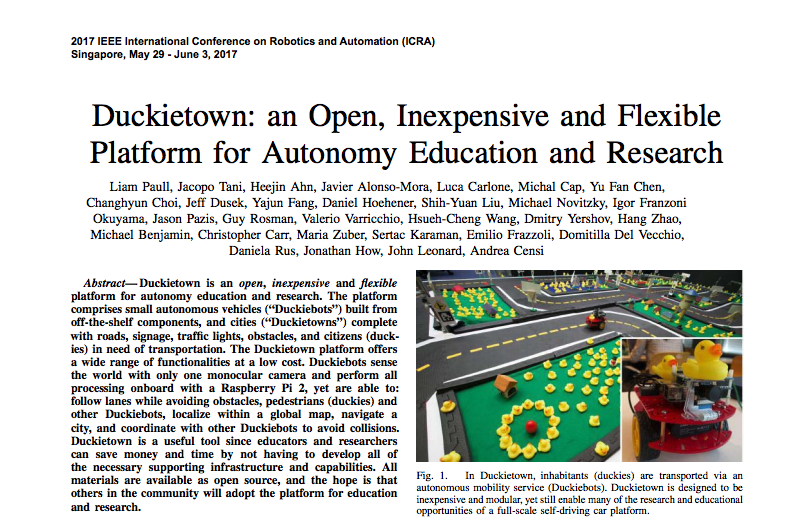
Read more Duckietown based papers here.

Read more Duckietown based papers here.
Read more Duckietown based papers here.
Read more Duckietown based papers here.

Read more Duckietown based papers here.
Read more Duckietown based papers here.