Here is the author’s summary and overview of lessons learned from this work:
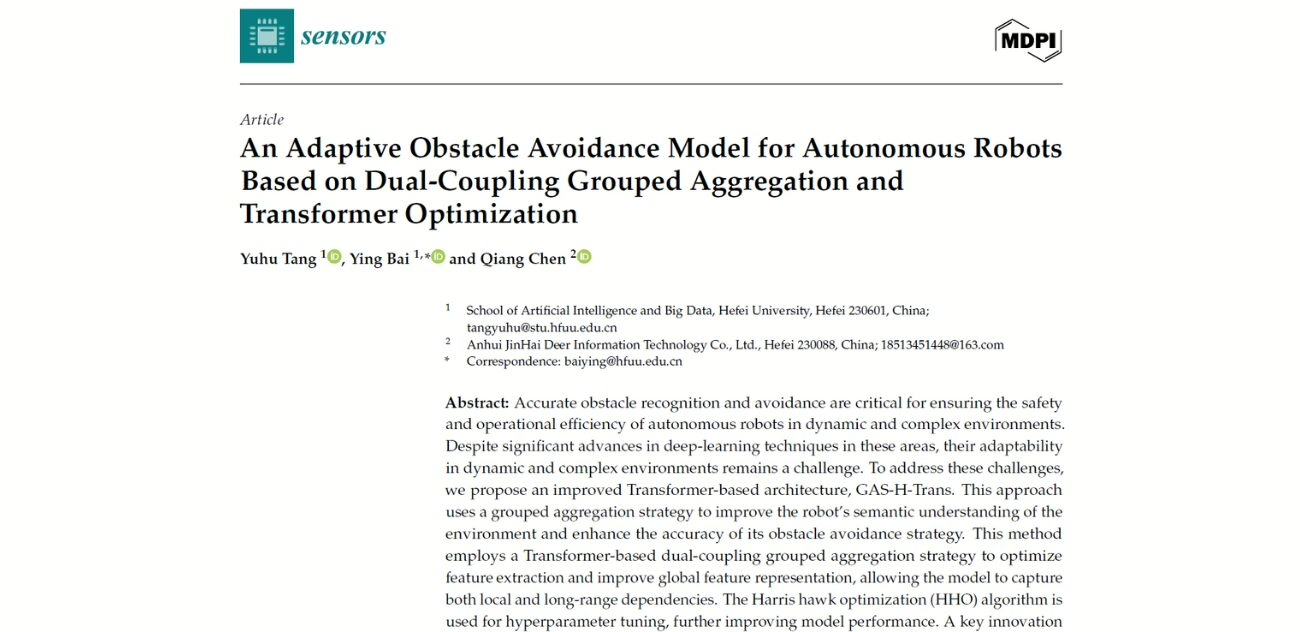
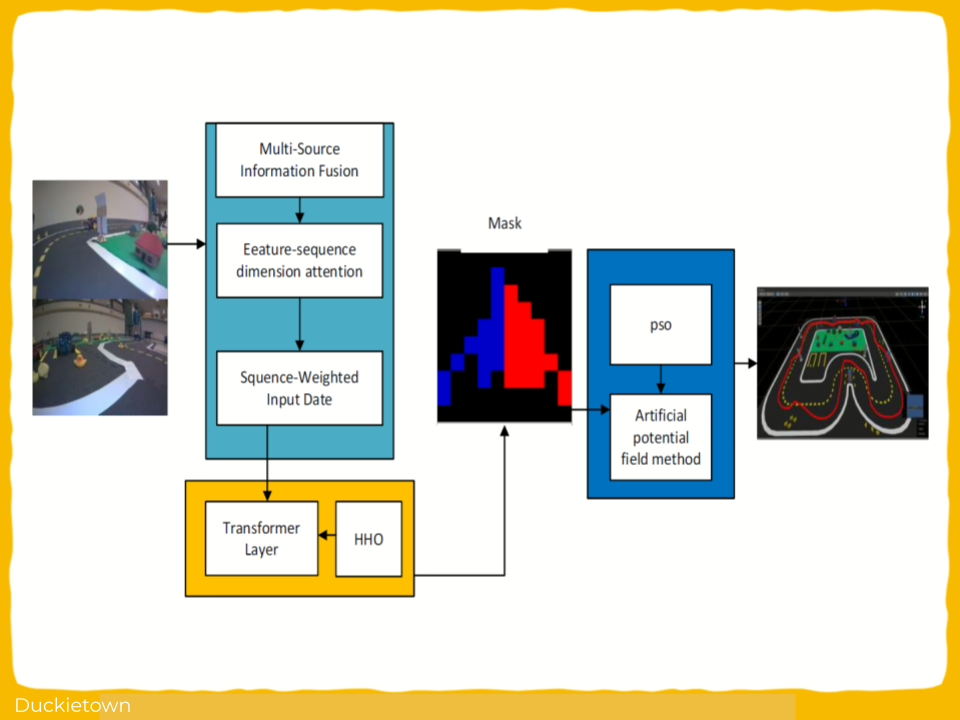
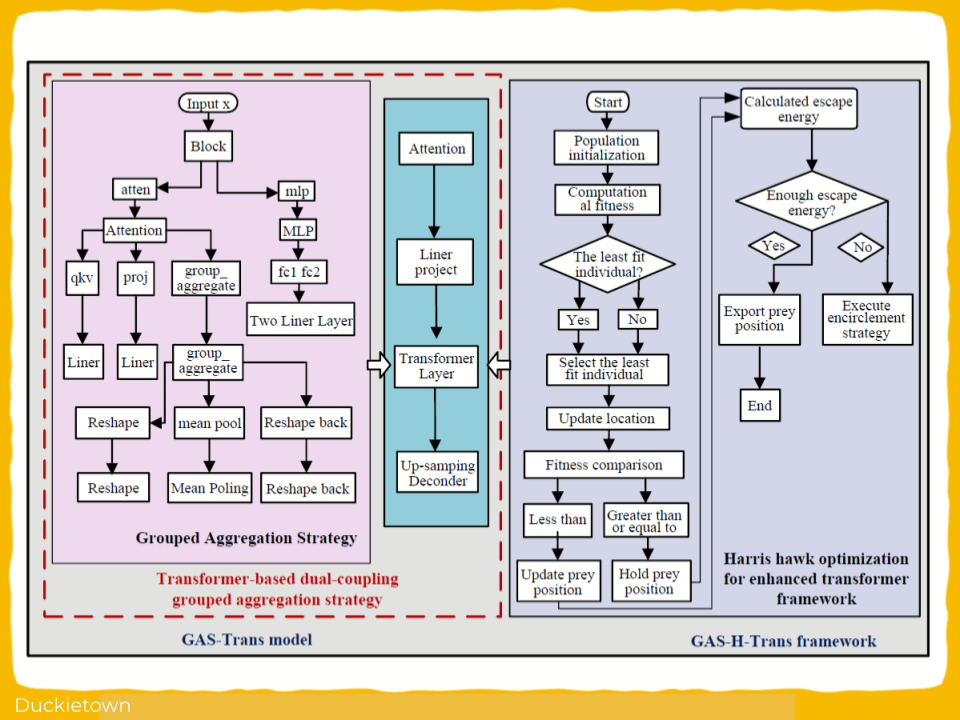
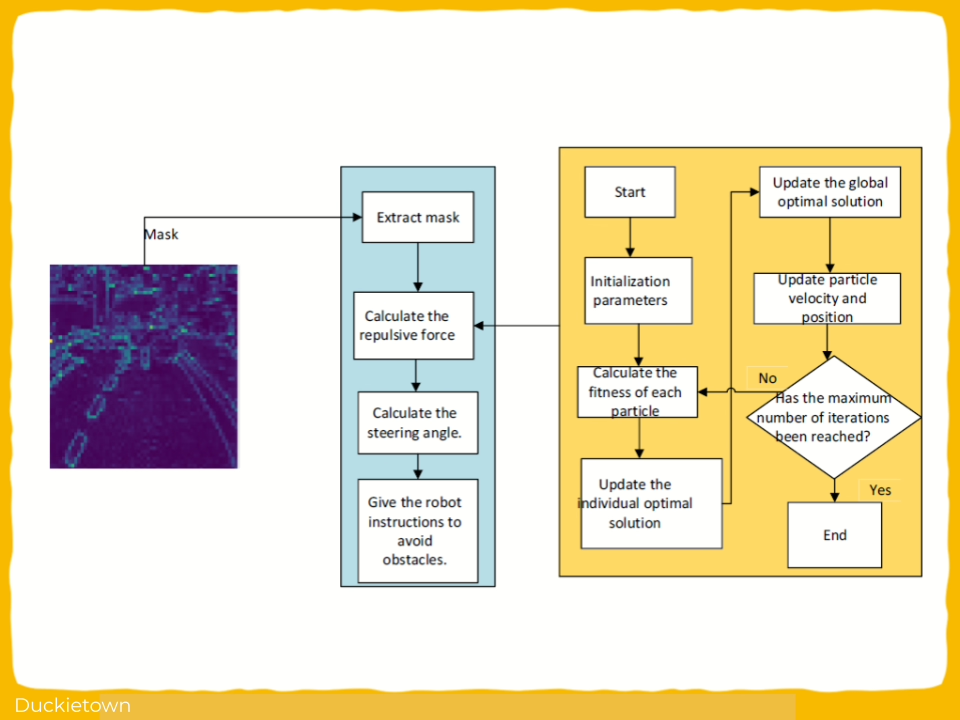
In this study, we proposed the GAS-H-Trans framework for image segmentation and dynamic obstacle avoidance in autonomous robots. The key contributions are summarized as follows. (1) Dual-coupling grouped aggregation strategy: A Transformer-based dualcoupling grouped aggregation method optimizes feature extraction and enhances global feature representation, thereby improving the model’s perception performance in dynamic motion planning. (2) Harris hawk optimization (HHO): The integration of the HHO algorithm into the GAS-Trans framework optimizes the number of Transformer layers and iterations, improving model accuracy and reducing computational costs. (3) PSOoptimized artificial potential field (APF): We integrated the PSO algorithm with APF to optimize the attractive and repulsive gain coefficients, addressing local minima issues and enhancing the global stability of the obstacle avoidance system.
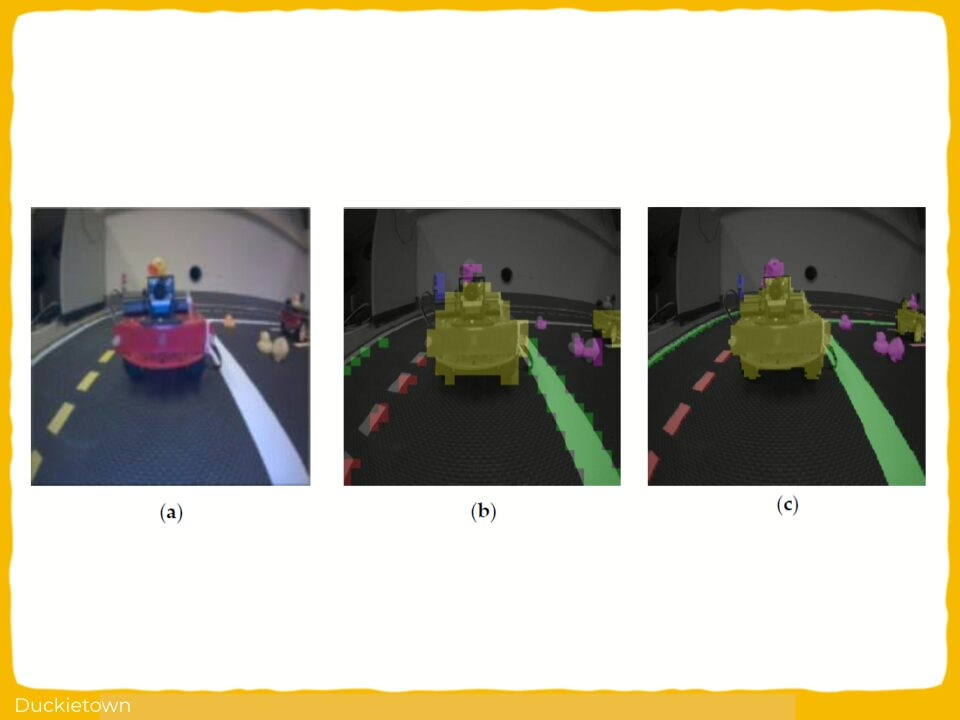
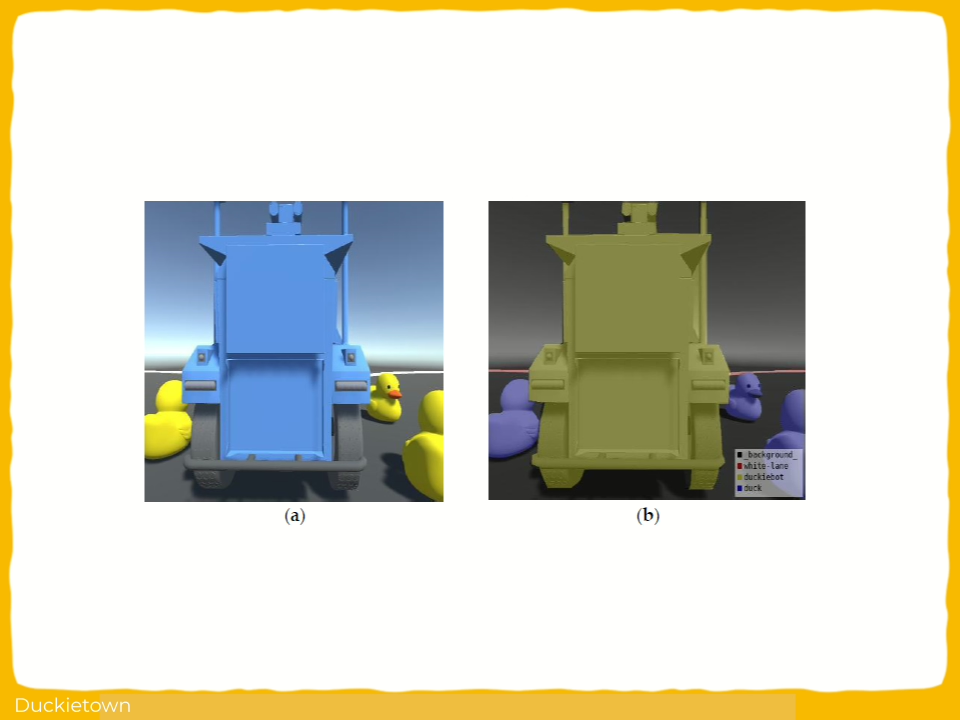
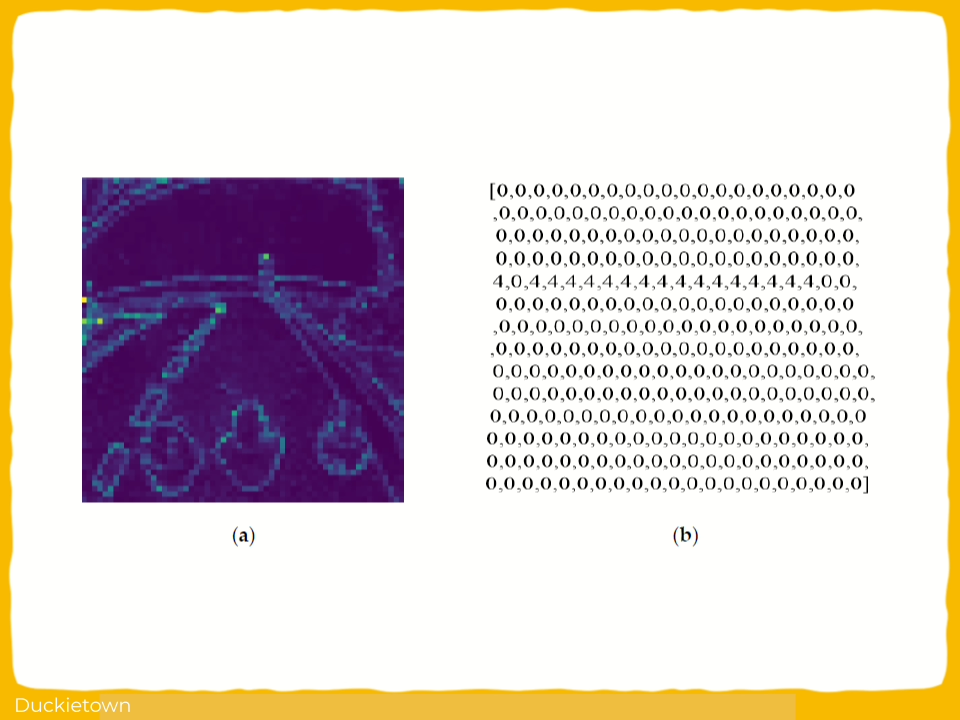
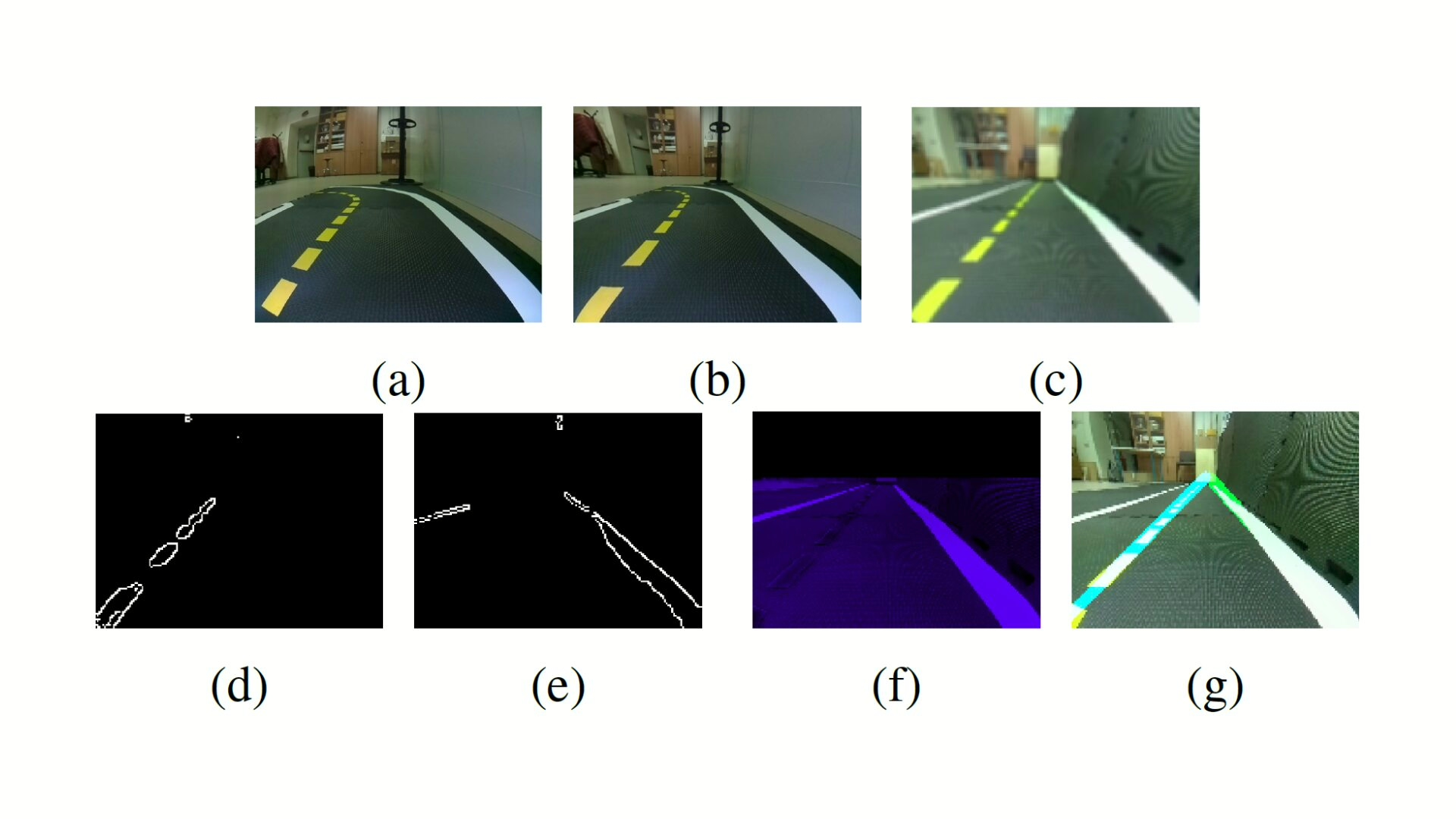
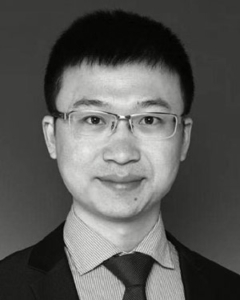
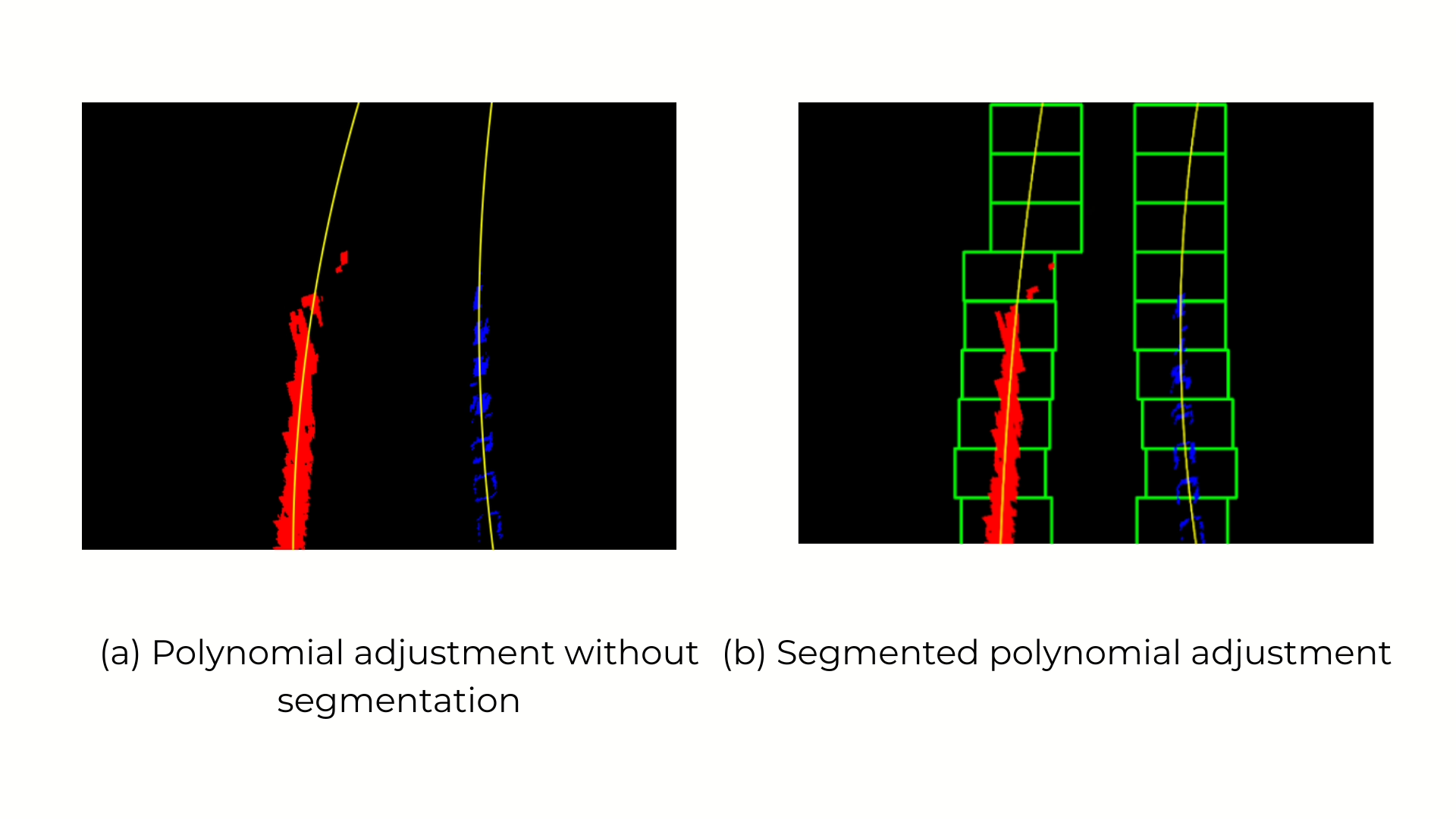
This study also proposes a secondary precise image segmentation strategy. By setting the observation points near critical obstacles for fine-tuned segmentation, the flexibility and accuracy of the segmentation model’s environmental perception are effectively enhanced, thereby improving the robot’s obstacle avoidance capabilities.
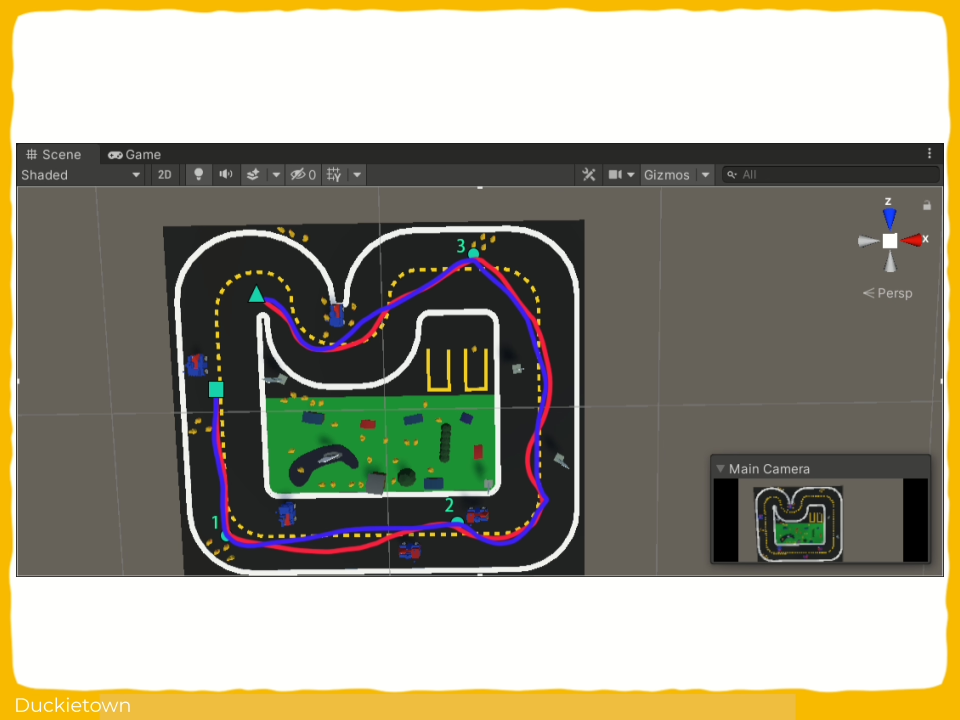
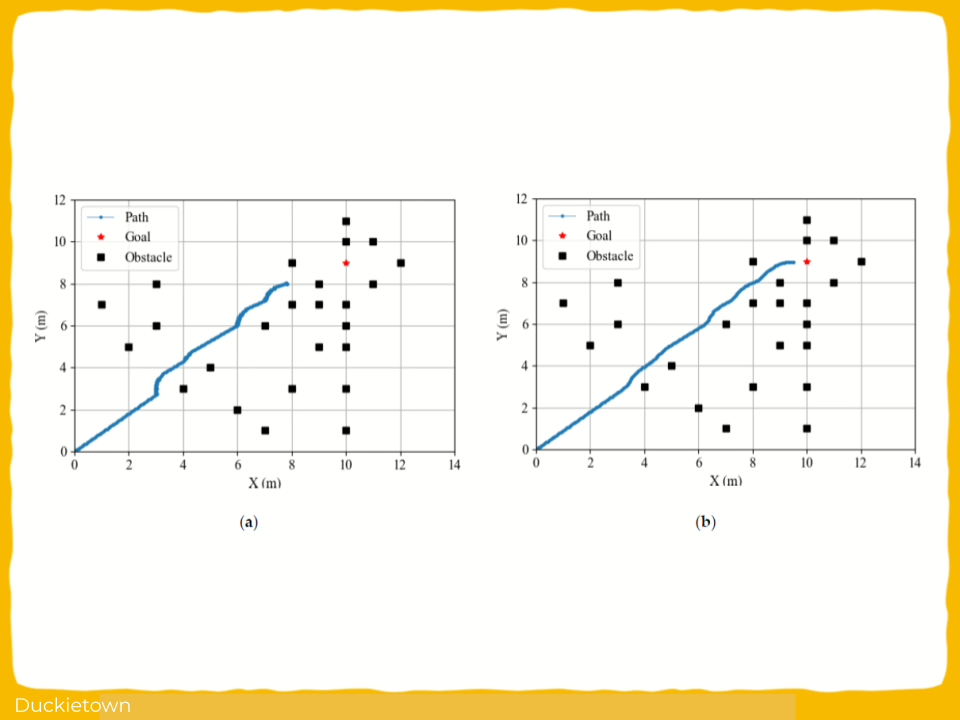
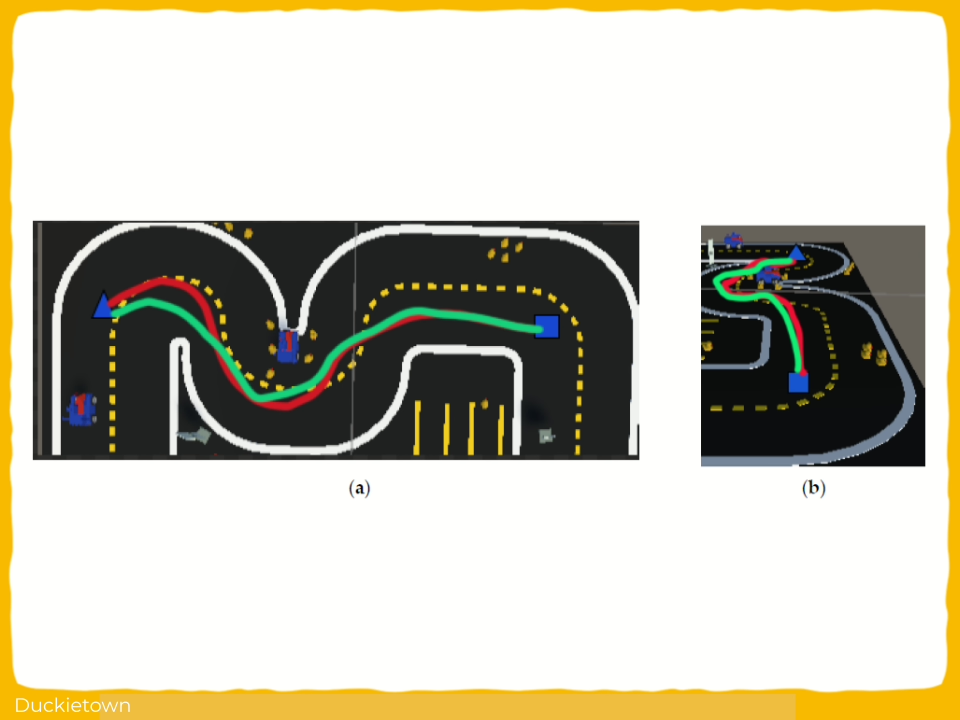
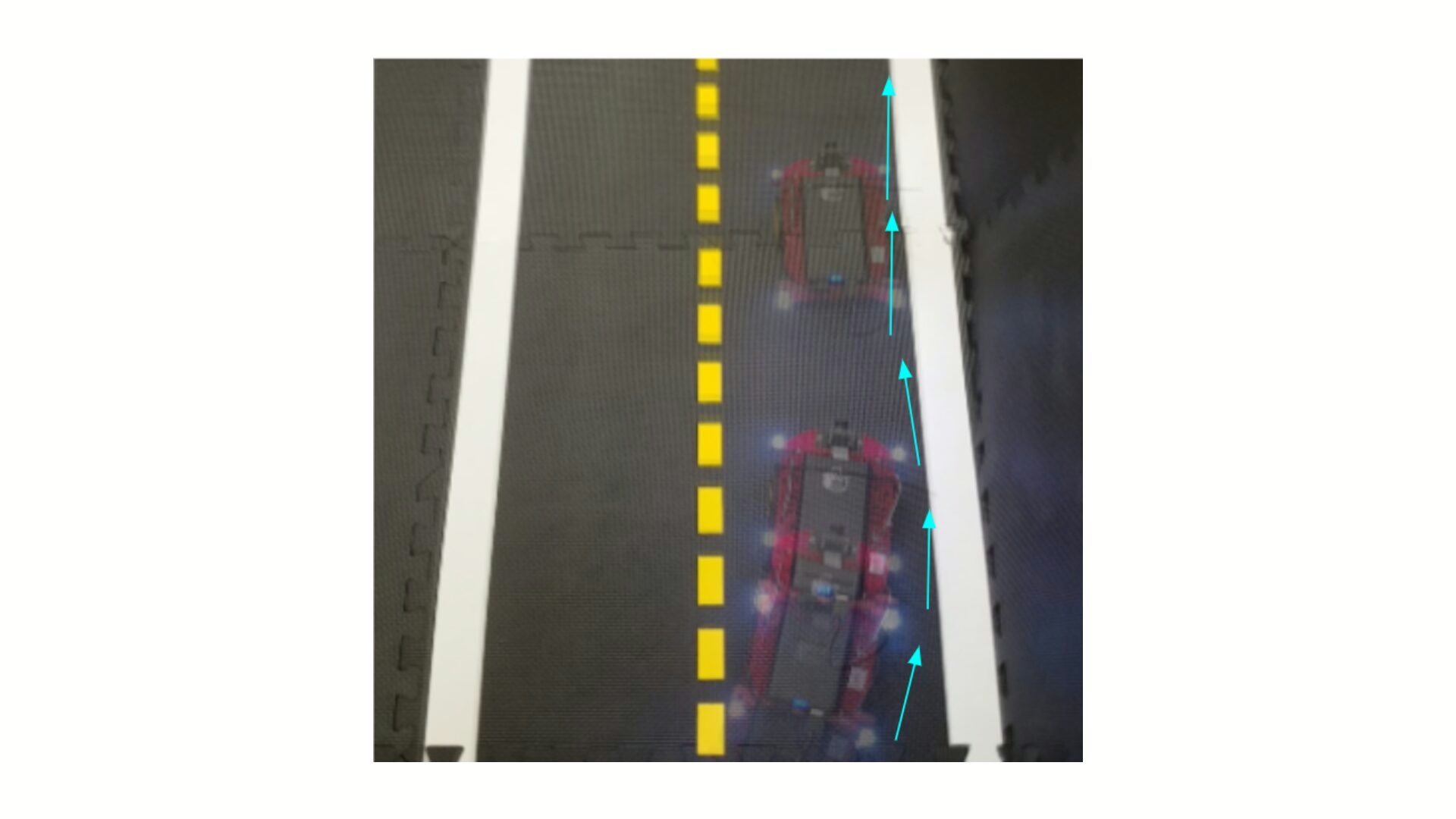
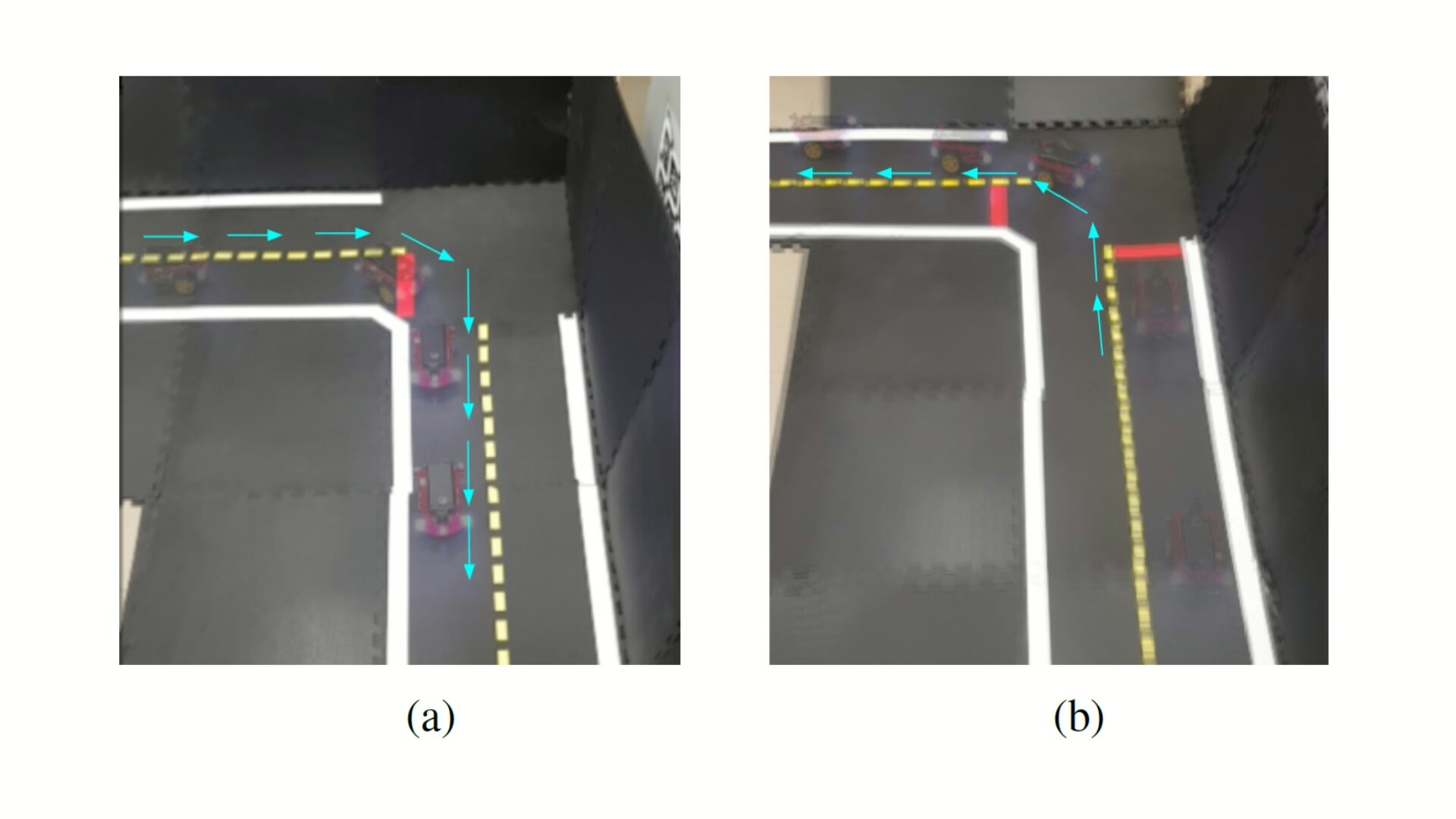
Through the integration of PSO-optimized APF with image segmentation, the GAS-HTrans + PSO-optimized APF framework demonstrated significant improvements in obstacle avoidance. In the experimental validation of this study, the obstacles remained static throughout the navigation process. Using this method, the autonomous robot dynamically adjusted its obstacle avoidance trajectory based on segmented environmental features. This integration significantly enhanced environmental perception capabilities and the accuracy of obstacle avoidance decisions, enabling more efficient navigation in static obstacle environments.
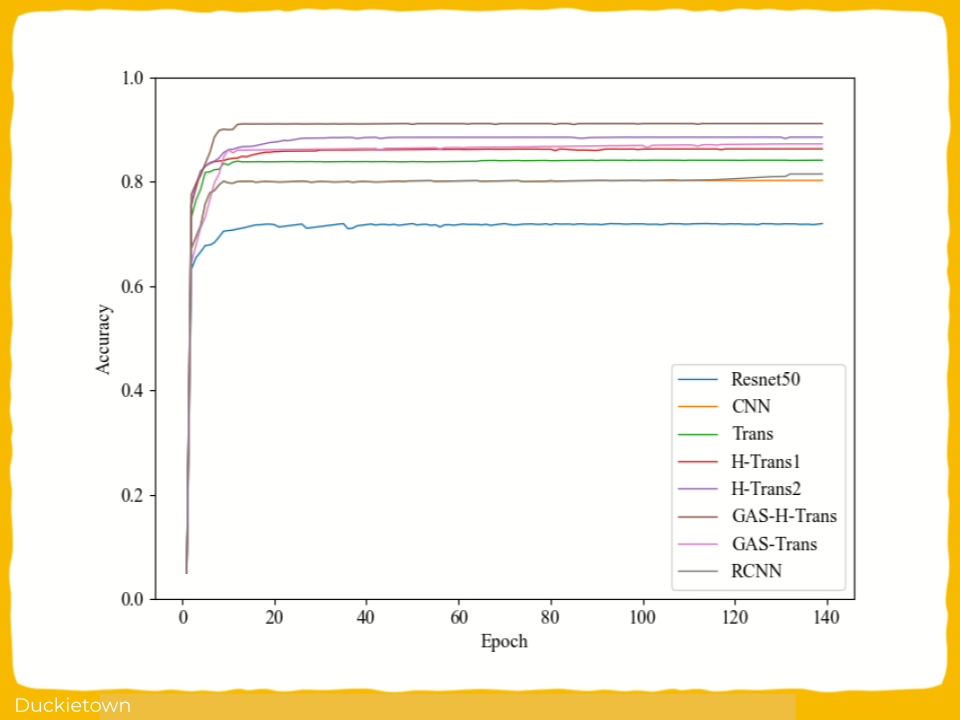
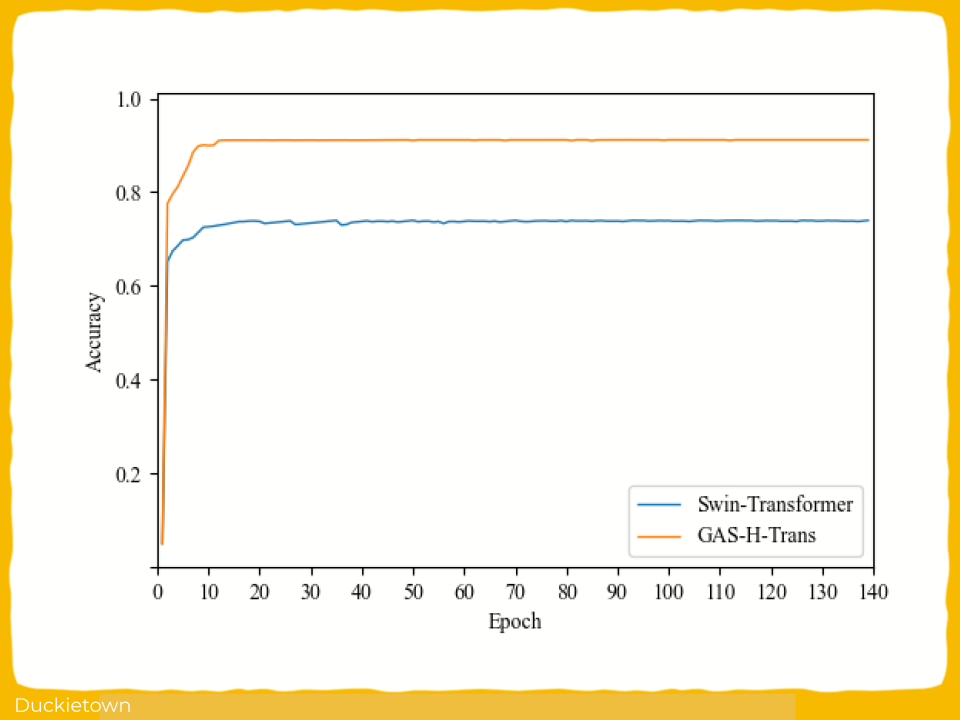
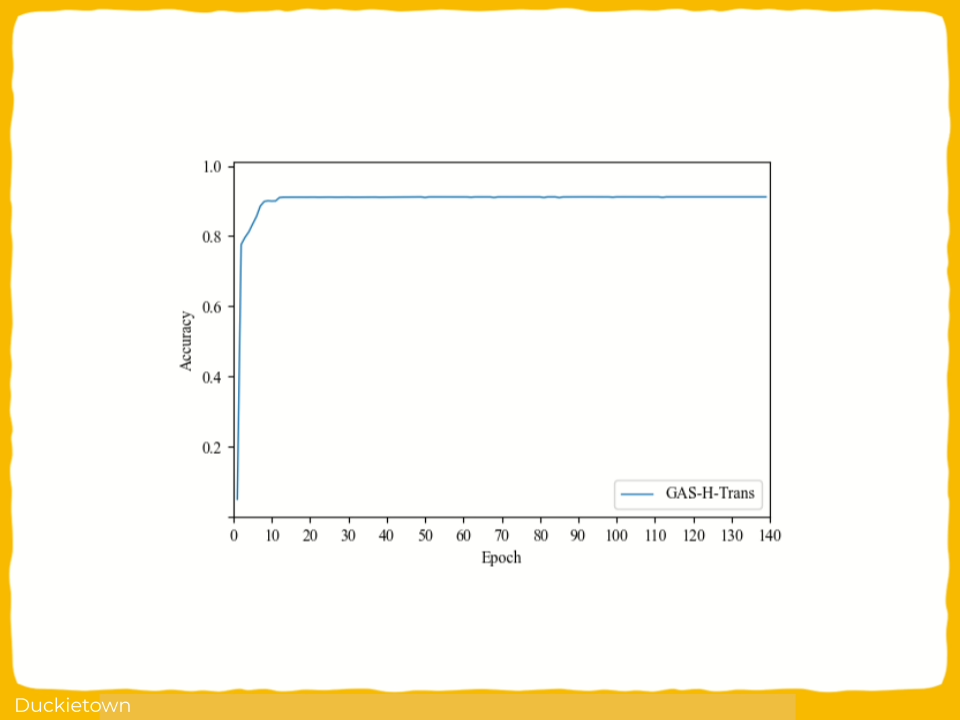
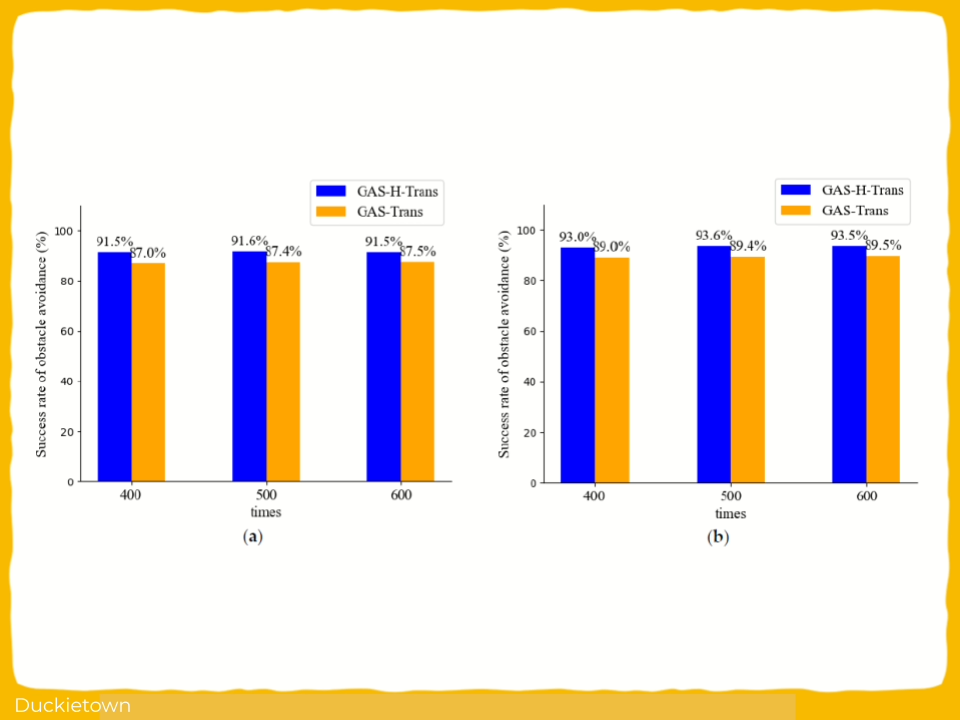
Extensive experiments on publicly available datasets (Duckiebot, KITTI, ImageNet) and in the Unity3D virtual robot environment validate the effectiveness of the proposed framework. The GAS-H-Trans framework outperformed traditional models in image segmentation tasks, achieving the highest mIoU of 85.2%. Furthermore, in virtual obstacle avoidance experiments, the GAS-H-Trans + PSO-optimized APF framework achieved an obstacle avoidance success rate of 93.6%.
These results effectively validate the proposed strategy, which combines secondary image segmentation from GAS-H-Trans with the PSO-optimized APF method, significantly improving obstacle avoidance performance in dynamic motion planning. Additionally, the GAS-H-Trans framework has the potential to be extended to fully dynamic environments by incorporating real-time object tracking and adaptive obstacle modeling. However, some limitations exist. The majority of the experiments were conducted in simulated environments, and future research will focus on validating the framework in real-world scenarios and improving real-time performance.
Additionally, the integration of multi-modal sensor data (such as LiDAR and ultrasonic sensors) will be an important direction for future work to further enhance environmental perception and robustness.
In conclusion, the new framework offers an innovative solution for autonomous robot obstacle avoidance in dynamic motion planning. Its powerful environmental perception and obstacle avoidance performance demonstrate significant potential for practical applications. With further optimization and real-world validation, this framework will play a crucial role in the future development of autonomous navigation and robotics technology.

































 Lanier - Duckietown")