Image sensors are ubiquitous for their well-known sensory traits (e.g., distance measurement, robustness, accessibility, variety of form factors, etc.). Achieving autonomy with monocular vision, i.e., using only one image sensor, is desirable, and much work has gone into approaches to achieve this task. Duckietown’s first Duckiebot, the DB17, was designed with only a camera as sensor suite to highlight the importance of this challenge!
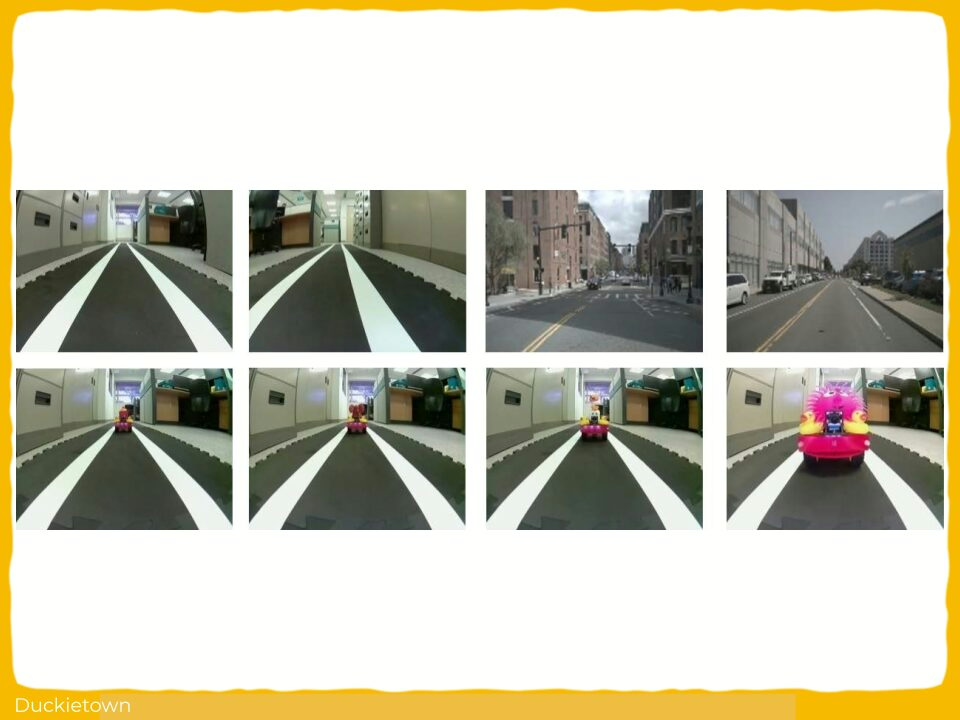
But images, due to the integrative nature of image sensors and the physics of the image generation process, are subject to motion blur, occlusions, and sensitivity to environmental lighting conditions, which challenge the effectiveness of “traditional” computer vision algorithms to extract information.
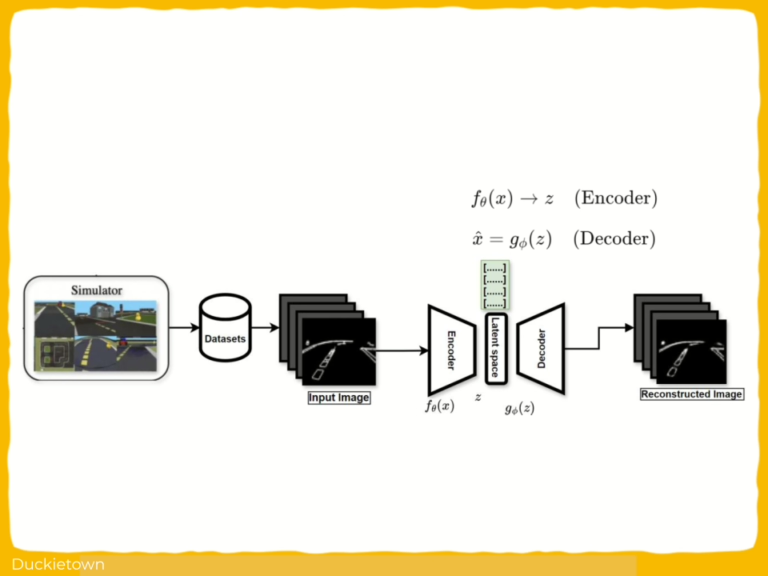
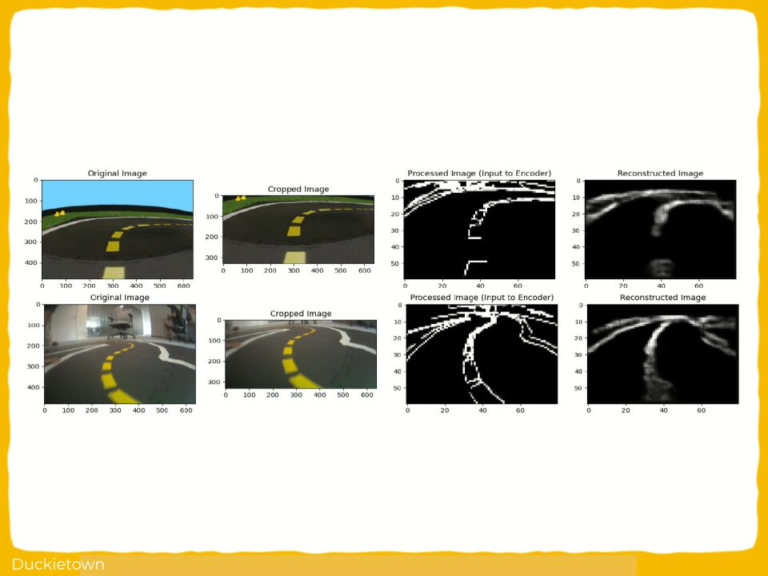
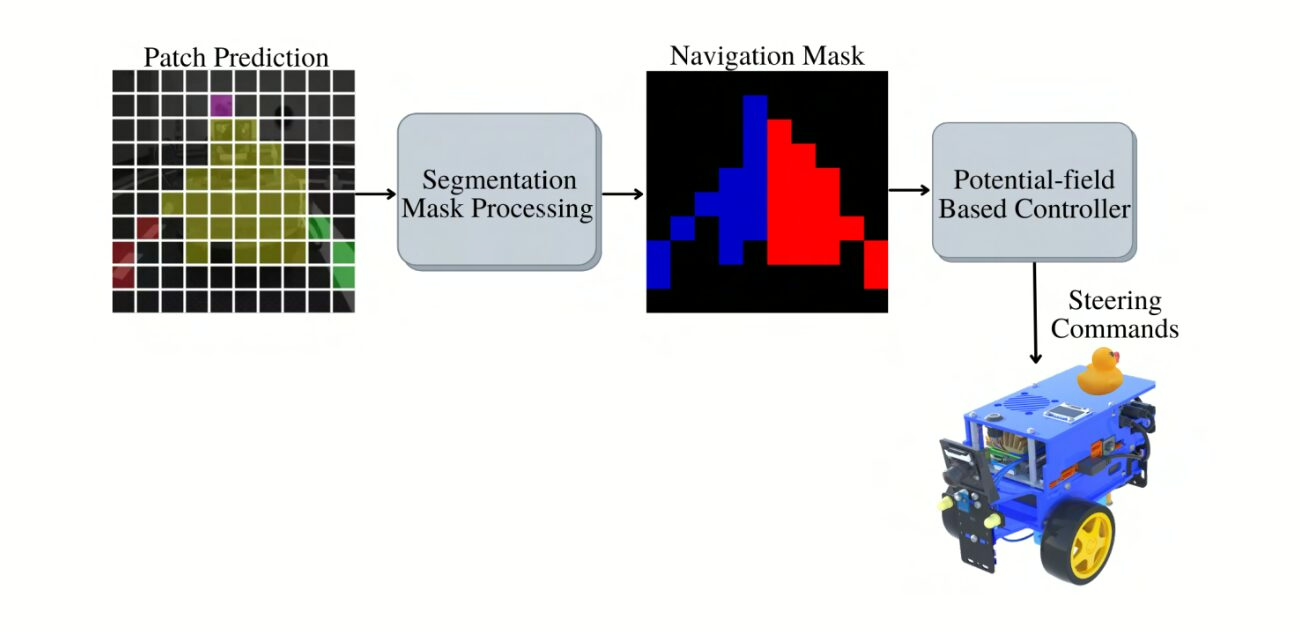
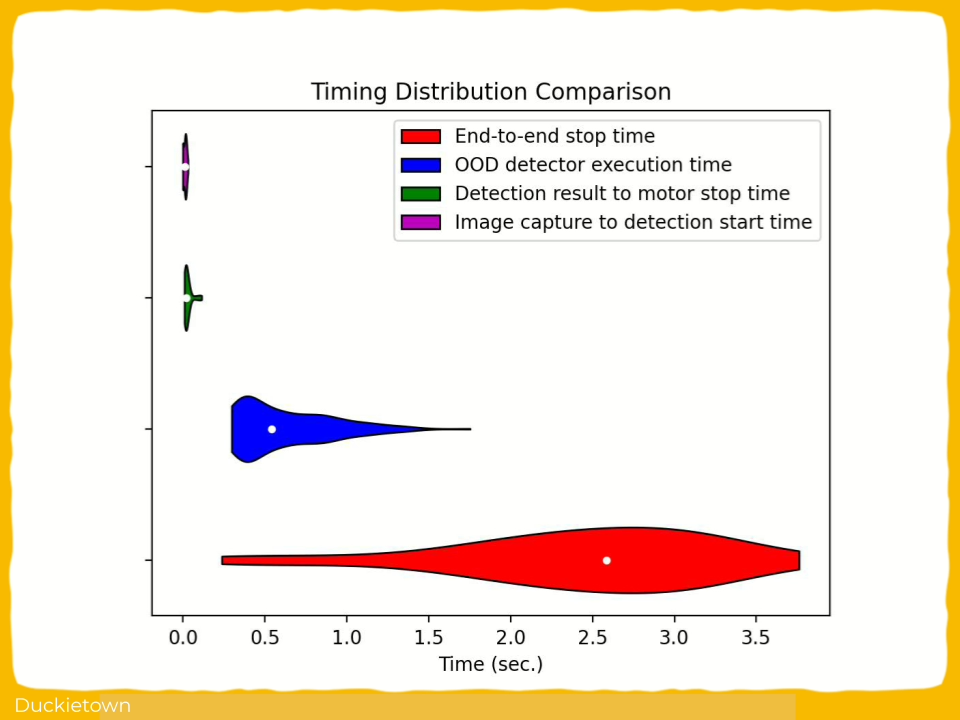
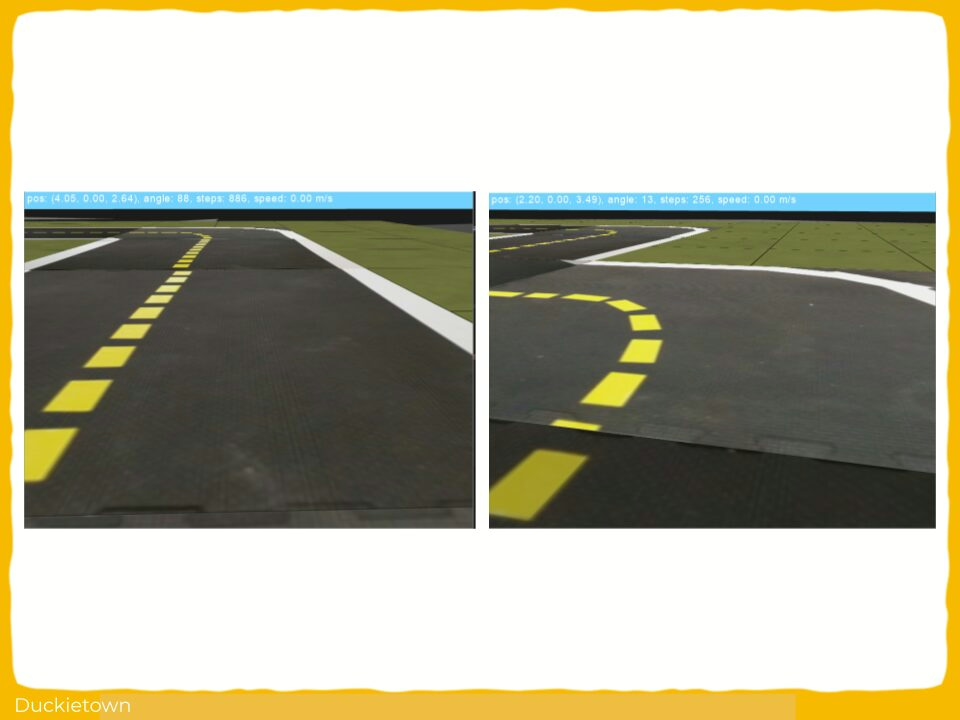
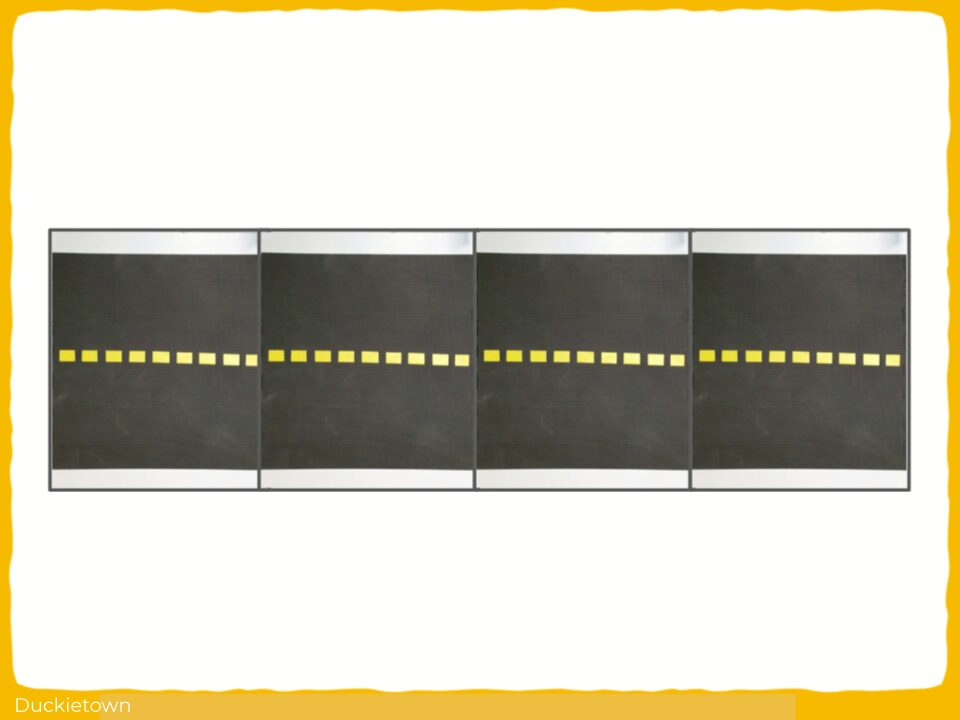
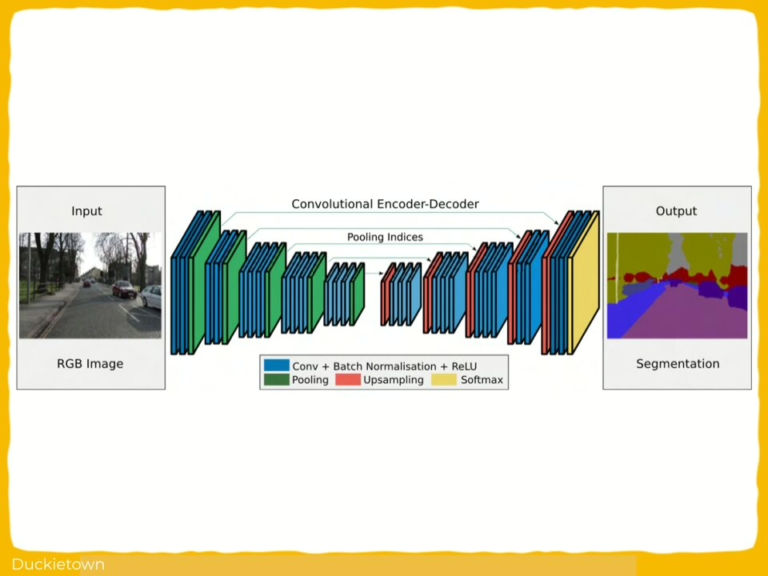
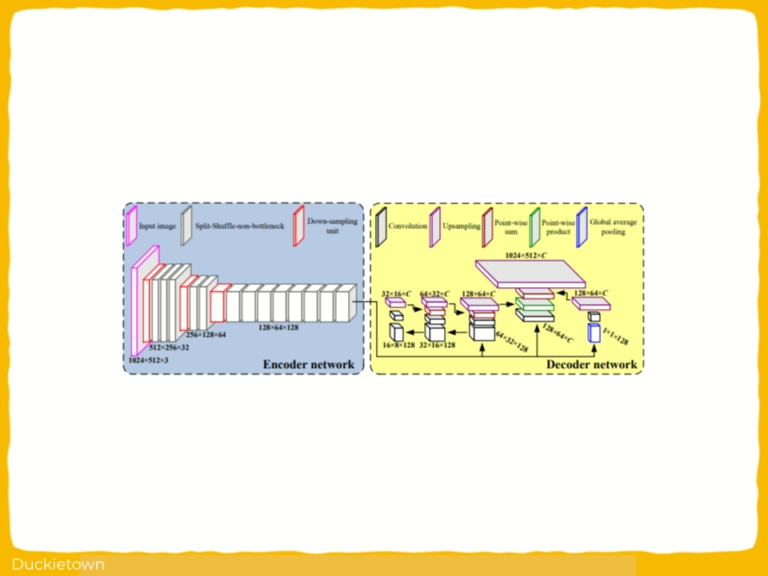
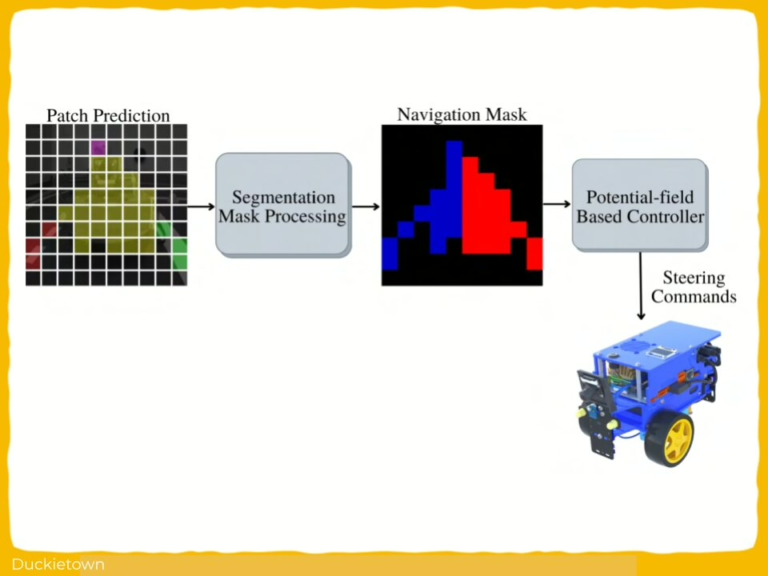
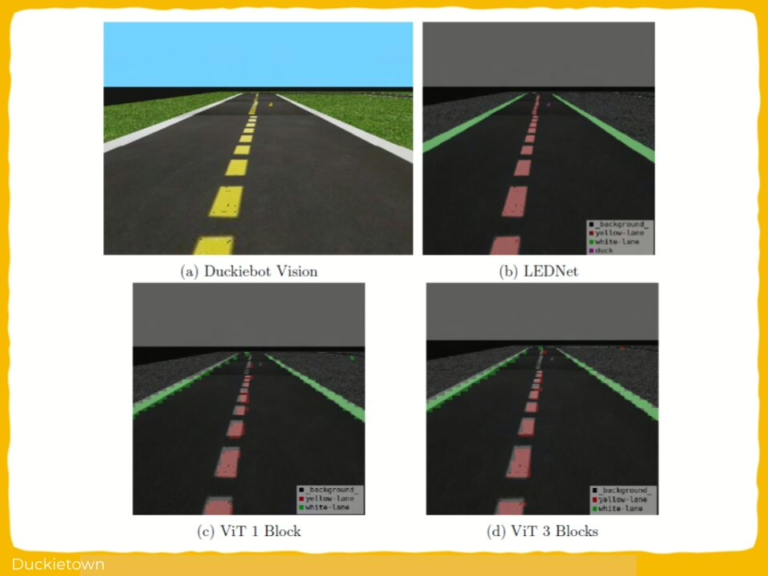
In this work, the author uses “LEDNet” to mitigate some of the known limitations of image sensors for use in autonomy. LEDNet’s encoder-decoder architecture with high resolution enables lane-following and obstacle detection. The model processes images at high frame rates, allowing recognition of turns, bends, and obstacles, which are useful for timely decision-making. The resolution improves the ability to differentiate road markings from obstacles, and classification accuracy.
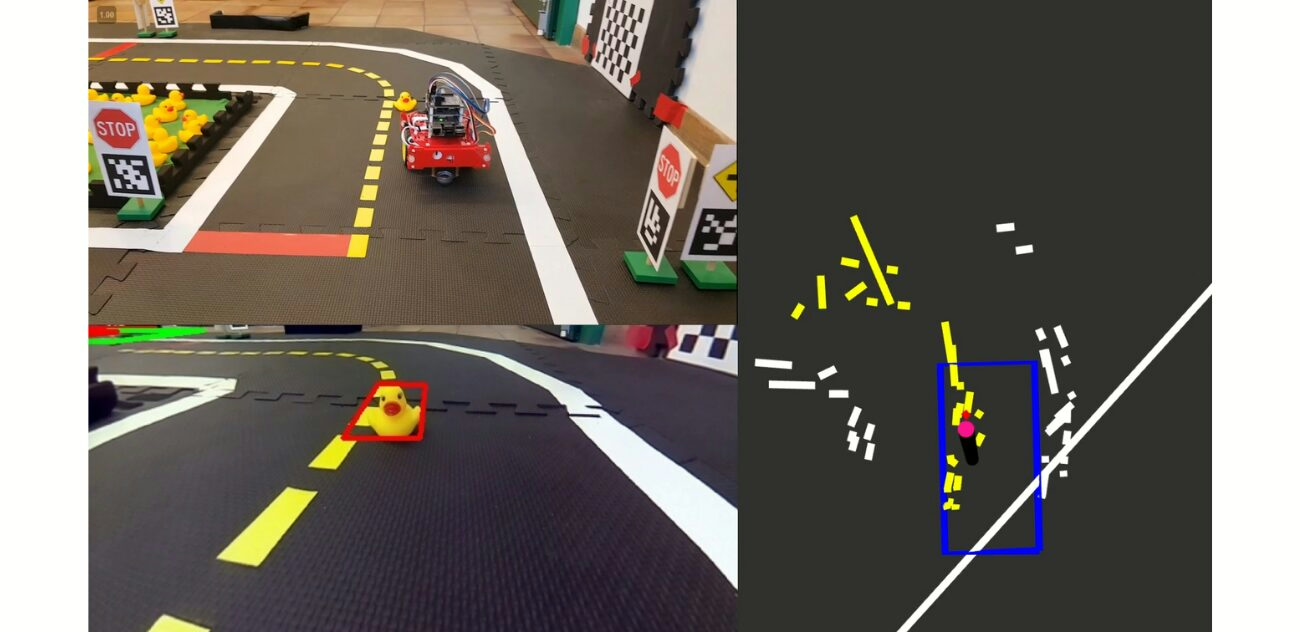
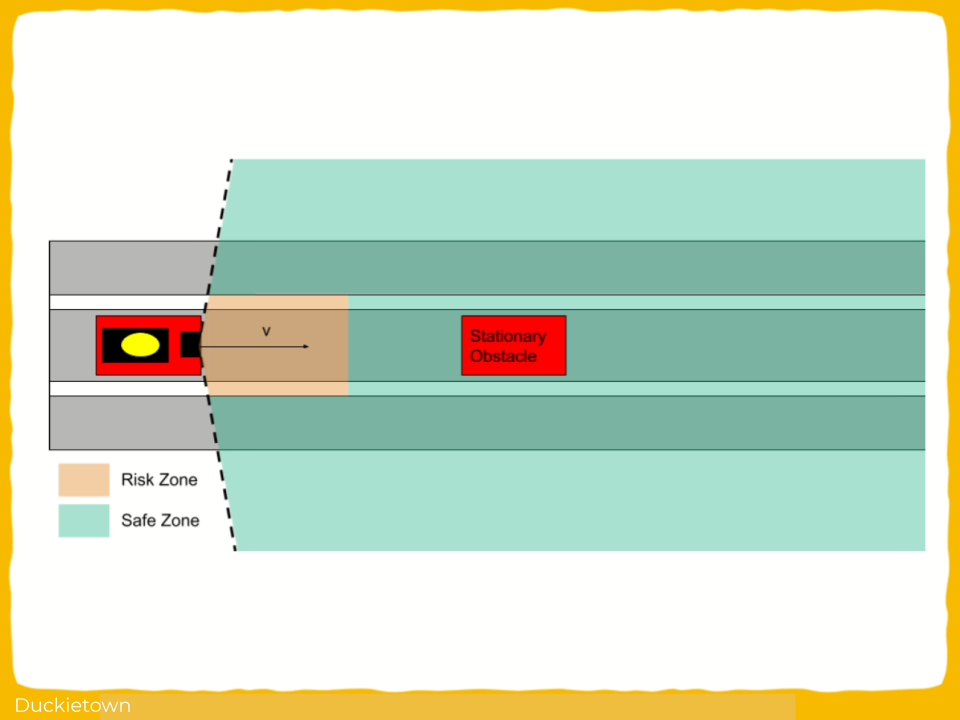
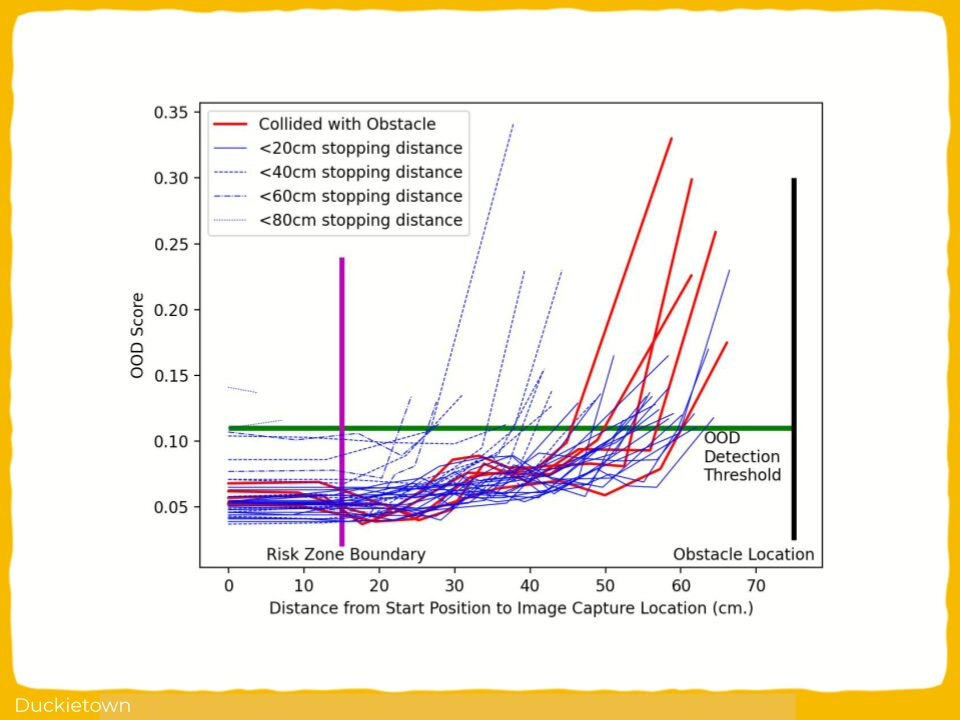
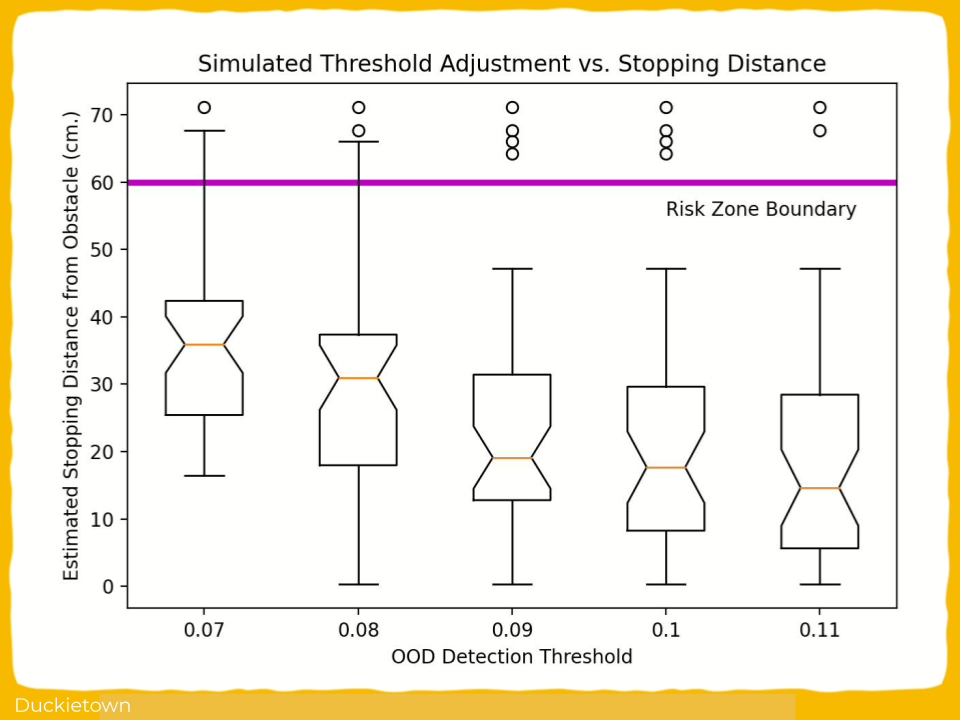
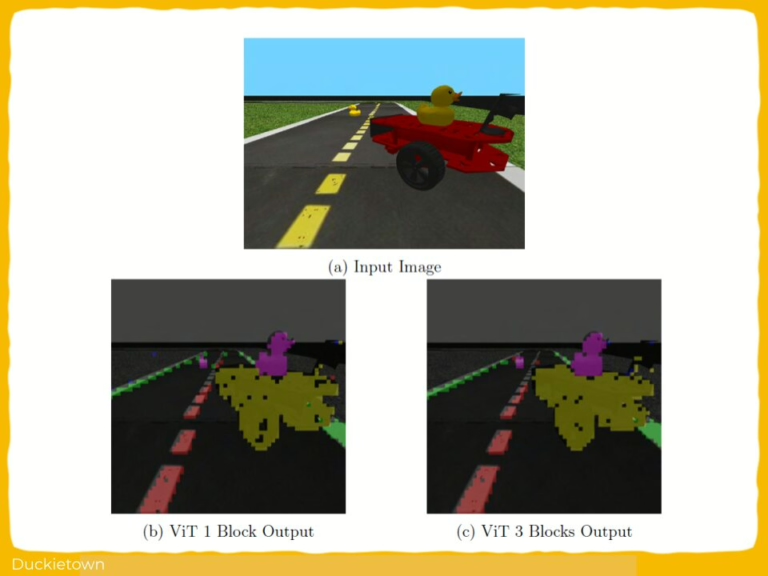
LEDNet’s obstacle-avoidance algorithm can classify and detect obstacles even at higher speeds. Unlike Vision Transformers (wiki) (ViT) models, LEDNet avoids missing parts of obstacles, preventing robot collisions.
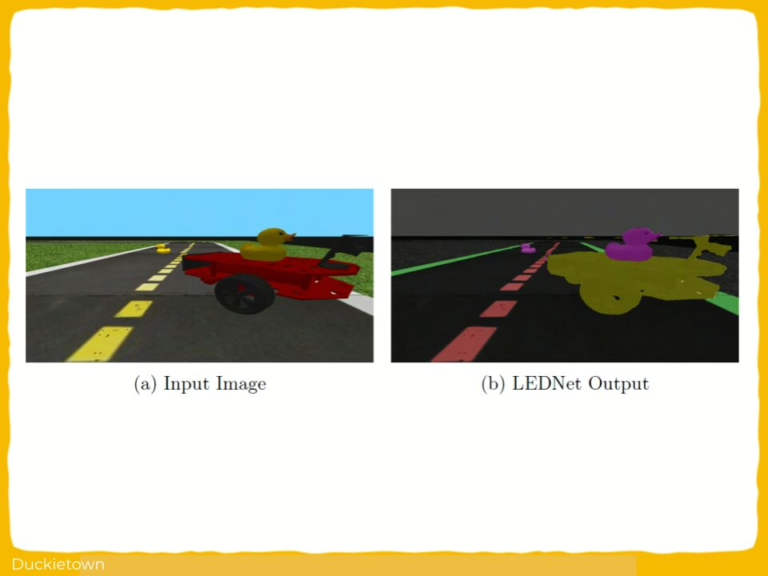
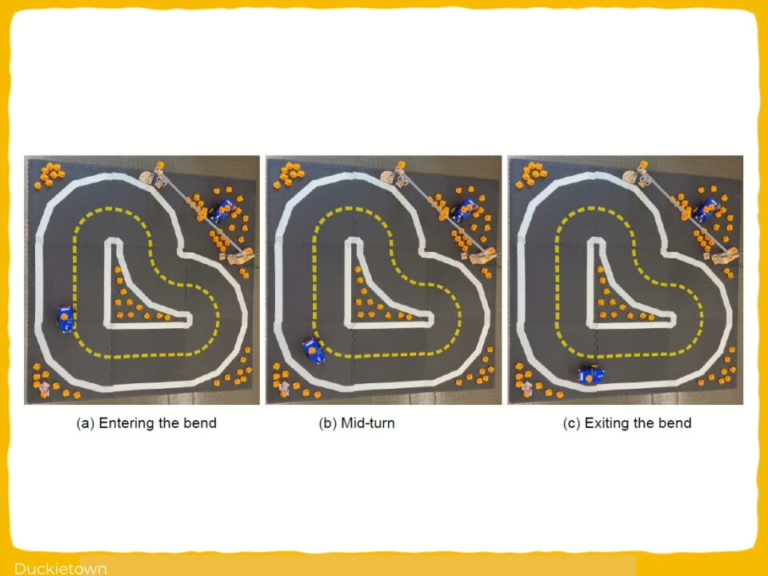
The model handles small obstacles by identifying them earlier and navigating around them. In the simulated Duckietown environment, LEDNet outperforms other models in lane-following and obstacle-detection tasks.
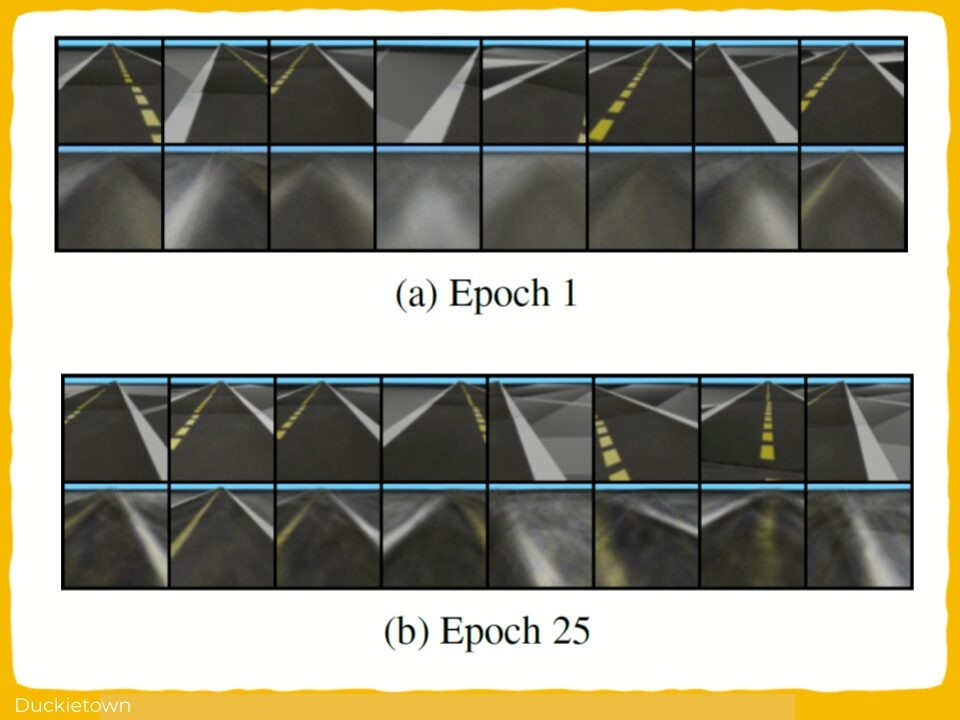
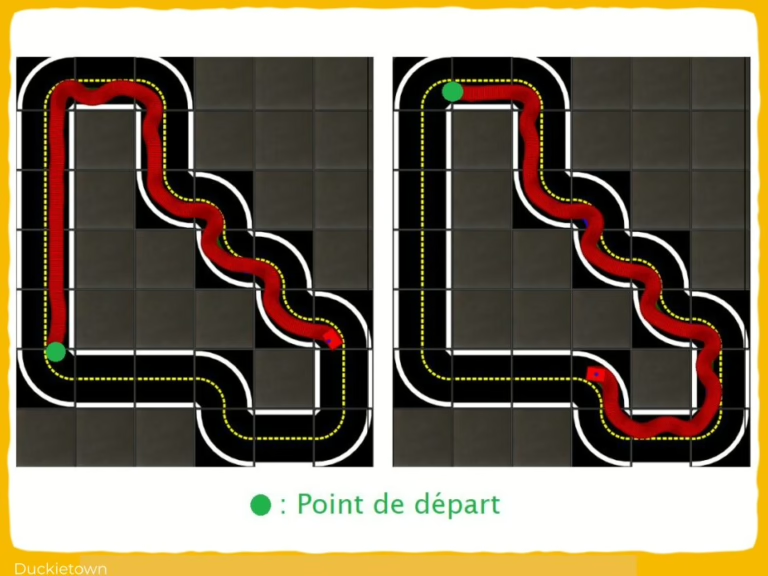
LEDNet uses “real-time” image segmentation to provide the Duckiebot with information for steering decisions. While the study was conducted in a simulation, the model’s performance indicates it would work in real-world scenarios with consistent lighting and predictable obstacles.
The next is to try it out!