Traffic congestion around the world is worsening, according to transport data firm INRIX. In the U.S. alone, Americans wasted an average of 97 hours in traffic in 2018 – that’s two precious weekends worth of time. Captivity in traffic also costs them nearly $87 billion in 2018, an average of $1,348 per driver. Clearly, the need for smart transportation is reaching a fervor, not only to alleviate the mental and financial state of drivers, but to address the significant economic toll on affected cities.
Fortunately, development of intelligent mobility technologies is advancing. In an ongoing research project funded by the U.S. Department of Energy’s (DOE) Advanced Research Projects Agency-Energy (ARPA-E) NEXTCAR program, BU researchers in collaboration with researchers from University of Delaware, University of Michigan, Oak Ridge National Lab, and Bosch are developing technologies for Connected and Automated Vehicles (CAVs) to increase their fuel efficiency and as a bi-product reduce traffic congestion.








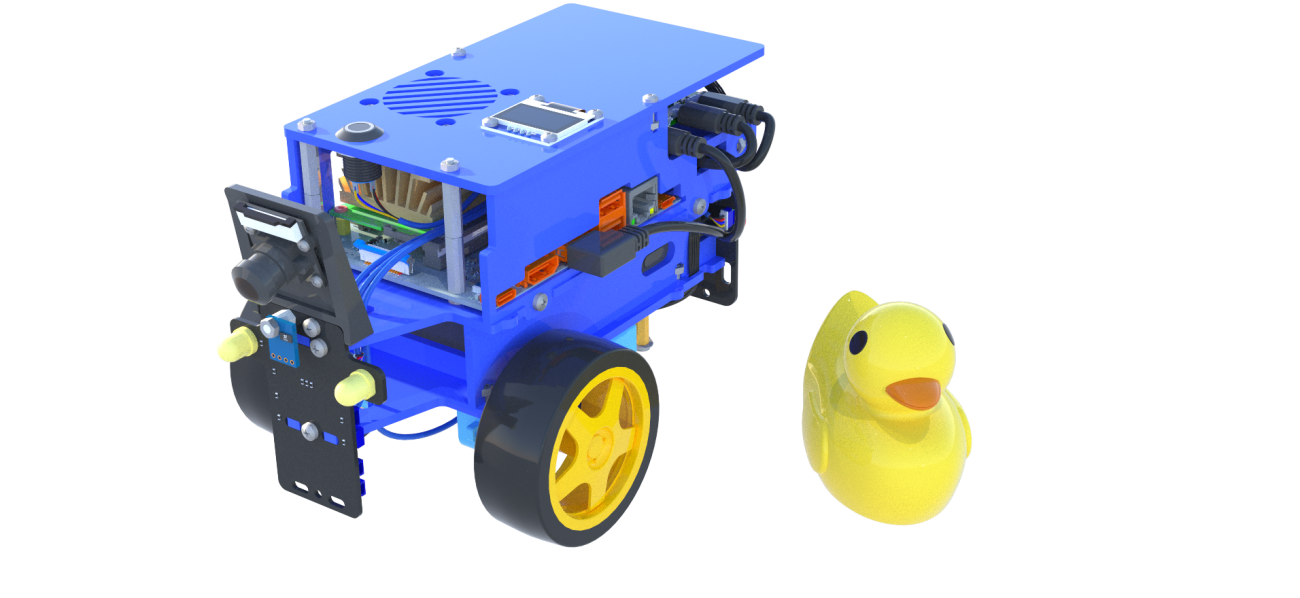
 - Duckietown")
 - Duckietown")